

서론
블루투스 비콘
연구지역
실험방법
실험결과
무지향성 블루투스 비콘의 RSSI 분포 분석 결과
지향성 블루투스 비콘의 RSSI 분포 분석 결과
곡선 구간 내 블루투스 비콘의 RSSI 분포 분석 결과
토의
결론
서론
지하광산에서는 작업장이 좁고 어두워 장비와 장비 혹은 장비와 작업자 간의 충돌사고가 빈번하게 발생한다(MSHA, 2018). 미국에서는 2000년부터 2007년까지 지하광산에서 장비와 작업자 간의 충돌사고가 135회 발생하였다(Ruff et al., 2011). 또한 2011년부터 2015년까지 지하광산에서 발생한 인명사고 중 약 47%는 장비와 작업자 간의 충돌로 인해 발생하였다(CDC, 2018a).
지하광산 내 장비와 작업자 또는 장비 간 충돌사고를 방지하기 위해 전자기 센서나 자기장 센서를 이용한 근접경고시스템(Proximity Warning System, PWS)이 개발되어 지하광산에서 활용되고 있다(Schiffbauer, 2002). PWS는 작동 중인 장비로부터 일정 거리 이내로 작업자나 장비가 접근하면 장비 운영자에게 위험 신호를 제공하는 장치이다(CDC, 2018b). PWS와 유사한 시스템으로는 센서를 이용하여 작업자나 장비의 접근을 탐지하는 근접탐지시스템(Proximity Detection System, PDS)과 충돌 위험시 장비를 자동 제어하는 충돌방지시스템(Collision Avoidance System, CAS) 등이 있다.
미국 National Institute of Occupational Safety and Health(NIOSH)는 광산 현장용 PWS 개발에 관한 다양한 연구를 수행하였다. NIOSH(2000)는 50톤 덤프트럭에 다양한 센서들을 부착하여 운전자 시야의 사각지대에 존재하는 장애물들을 감지하는 실험을 수행하였다. Ruff and Hession-Kunz(2001)는 Radio-Frequency Identification(RFID) 기술을 활용한 지하광산 PWS를 개발하였다. 이 시스템은 RFID 태그에서 송신되는 315 MHz 주파수 대역의 무선 신호를 리더기에서 수신하여 음영지역에 존재하는 물체의 접근에 대한 단계별(near, middle, far) 충돌 위험 알림을 제공한다. 상용화된 RFID 기반의 PWS로는 Becker Mining Systems의 Underground Collision Avoidance System (Becker Mining, 2018)과 Mine Site Technologies의 IMPACT(MST, 2018)가 대표적이다.
RFID 이외에도 자기장 센서가 PWS 개발에 사용되었다. Schiffbauer(2002)는 자기장 송신기를 이용하여 연속채광기(Continuous Mining Machine, CMM)에 접근하는 작업자와 장비를 감지하는 Hazardous Area Signaling and Ranging Device(HASARD)를 개발하였다. 이 시스템은 wire-loop antennas가 송신하는 60 kHz 대역 자기장을 수신기에서 감지한다. 충돌 위험이 감지되면 시스템은 경보음과 진동 신호를 장비 운영자에게 제공한다. 자기장을 이용한 상용 PWS 제품은 PBE group의 Proximity Alert System(PBE, 2018), STRATA의 HazardAvert(STRATA, 2018), NAUTILUS International의 Buddy proximity detection system(Nautilus International, 2018) 등이 있다.
최근에는 Bluetooth 4.0 무선 통신 기술인 저전력 블루투스(Bluetooth Low Energy, BLE)를 이용한 PWS 개발이 시도되고 있다. BLE 기술은 2.4 GHz 주파수 대역의 IEEE 802.15.1 통신 표준을 기반으로 하며, 소비 전력이 작고, 패킷 크기를 줄여 보다 신속하게 데이터를 전송할 수 있다(Bluetooth, 2018a). 블루투스 비콘은 BLE 신호를 주기적으로 송신하는 기기이다. Park et al.(2016)은 블루투스 비콘을 이용하여 건설현장에서 작업자와 장비 간 충돌사고를 예방하기 위한 PWS를 개발하였다. 이 연구에서 개발한 PWS는 덤프트럭과 휠 로더에 설치된 다수의 블루투스 비콘에서 송신되는 BLE 신호를 스마트폰에서 수신하여 보행 작업자에게 위험 신호를 제공한다. Park et al.(2017a)은 블루투스 비콘 기반의 위치 탐지 기술을 Building Information Model(BIM) 기반의 위험 인식 플랫폼과 클라우드 기반의 통신 플랫폼에 접목한 새로운 안전 감시 시스템을 제안하였다. 통합된 시스템을 건설현장에 적용한 결과 위험 상황을 감지하고 작업자의 작업 경로를 추적하여 건물 내 잠재적인 위험 상황을 파악할 수 있었다. Park et al.(2017b)은 블루투스 비콘 기반의 PWS 구현 시 덤프트럭에 접근하는 장비의 유형과 접근 속도 조건에 따라 발생하는 에러와 지연 시간을 조사하였다. Baek and Choi(2018)는 블루투스 비콘과 스마트폰을 이용한 도로 터널용 Bluetooth Beacon-based UNderground PROximity Warning System(BBUNPROWS)을 개발하였다. 이 시스템은 작업자 안전모, 차량 후미, 위험 구역에 설치된 블루투스 비콘이 송신하는 BLE 신호를 덤프트럭에 탑재된 스마트폰에서 수신하고, 수신 강도(Received Signal Strength Index, RSSI)의 크기에 따라 시각적, 청각적 방법으로 운전자에게 단계적인 충돌 위험 신호를 제공하였다.
지하광산 현장에는 블루투스 비콘의 BLE 신호 전파를 방해하는 다수의 요인이 존재할 수 있다. 예를 들어, 지하광산 내부에는 굴착 장비와 같이 높은 전력을 필요로 하는 장비들이 존재하고, 장비 전력 공급을 위한 전력망이 설치되어 있다. 이는 높은 전자기장을 발생시켜 라디오 신호의 전파를 방해할 수 있다. 또한, 지하광산 내 좁고 긴 갱도와 90도 가까이 꺾인 갱도 교차지점에서는 라디오 신호의 반사와 회절이 발생하여 불안정한 전파가 이루어질 수 있으며, 지하광산 암반의 전자기적 특성은 라디오 신호를 감쇄시킬 수 있다. 따라서 지하광산 현장에 적합한 블루투스 비콘 기반의 PWS 개발을 위해 지하광산 내에서의 BLE 신호 전파 특성을 조사하고 이해할 필요가 있다. 그러나 현재까지 수행된 연구에서는 지하광산과 같은 폐쇄된 공간에서 다양한 조건에 따른 BLE 신호 전파 특성 변화를 분석하지 않았다.
본 연구의 목적은 지하광산 현장에서 블루투스 비콘이 송신하는 BLE 신호 세기, 신호 전파 방향성, 갱도 구간 특성(직선 및 곡선) 조건에 따라 변화하는 RSSI 분포 특성을 분석하는 것이다. 국내 자수정 폐광산을 연구지역으로 설정하여 블루투스 비콘과 스마트폰을 이용한 BLE 신호의 RSSI 분포 조사 실험을 수행한 후, 그 결과를 논문에 제시하고자 한다.
블루투스 비콘
블루투스는 휴대용 기기 간 양방향 무선 통신 기술이다(Bluetooth, 2018a). 2001년 채택된 블루투스 클래식은 무선 키보드나 무선 마우스와 같은 기기들 사이의 무선 연결과 데이터 전송에 활용되었다. 그러나 이 기술은 근거리 주파수 간섭 문제, 느린 데이터 전송 속도 문제, 높은 전력 소비 문제로 인해 다양한 용도로 활용되기 어려웠다. 이러한 문제를 해결하기 위해 블루투스 기술은 전력 소비를 감소시키고 데이터 전송 속도를 높이는 방향으로 발전되어왔다. 2010년 채택된 블루투스 4.0 버전인 저전력 블루투스(BLE) 기술은 사물인터넷(Internet of Things, IoT) 기술 구현과 Wearable device 개발을 위한 목적으로 도입되었다. 이 기술은 이전 버전의 블루투스 기술들과 비교하여 약 90%의 전력 소비를 감소시켰고, 빠른 데이터 전송을 가능하게 하였다.
블루투스 비콘은 ID와 RSSI를 BLE 신호와 함께 주변 기기들에 주기적으로 송신하는 장비이다. 블루투스 비콘이 송신하는 BLE 신호의 세기는 tx-power로 나타내며, 단위는 dBm이다(Bluetooth, 2018c). BLE 신호의 수신 강도는 RSSI 값으로 정량화될 수 있다. RSSI는 음수 형태로 나타내며, -99 dBm에서 -35 dBm 사이의 값으로 표현된다. RSSI가 -100 dBm 이하인 BLE 신호는 잡음 신호로 판단된다.
블루투스 비콘은 다음과 같은 3가지 방식으로 주변 기기들과 통신할 수 있다(Bluetooth, 2018b).
∙Point-to-Point: 대용량 데이터를 전송하는 Master 기기와 데이터를 수신하는 Slave 기기가 1:1로 페어링 하여 데이터를 교환하는 방식이다. 이 방식은 대용량 데이터 교환이 가능하지만, 전력 소모가 높다는 문제점이 있다.
∙Broadcast: Broadcaster가 주변 기기들에 자신의 ID 정보를 주기적으로 전송하면 Observer가 정보를 수신하는 방식이다. Broadcaster 임무를 수행하는 기기는 주로 블루투스 비콘이며, Observer는 주로 PC나 스마트폰이 사용된다. 이 방식은 저용량 데이터 교환을 통해 전력 소비를 줄일 수 있다.
∙Mesh: 블루투스 Classic 방식과 블루투스 Smart 방식을 모두 지원하는 방식이다.
연구지역
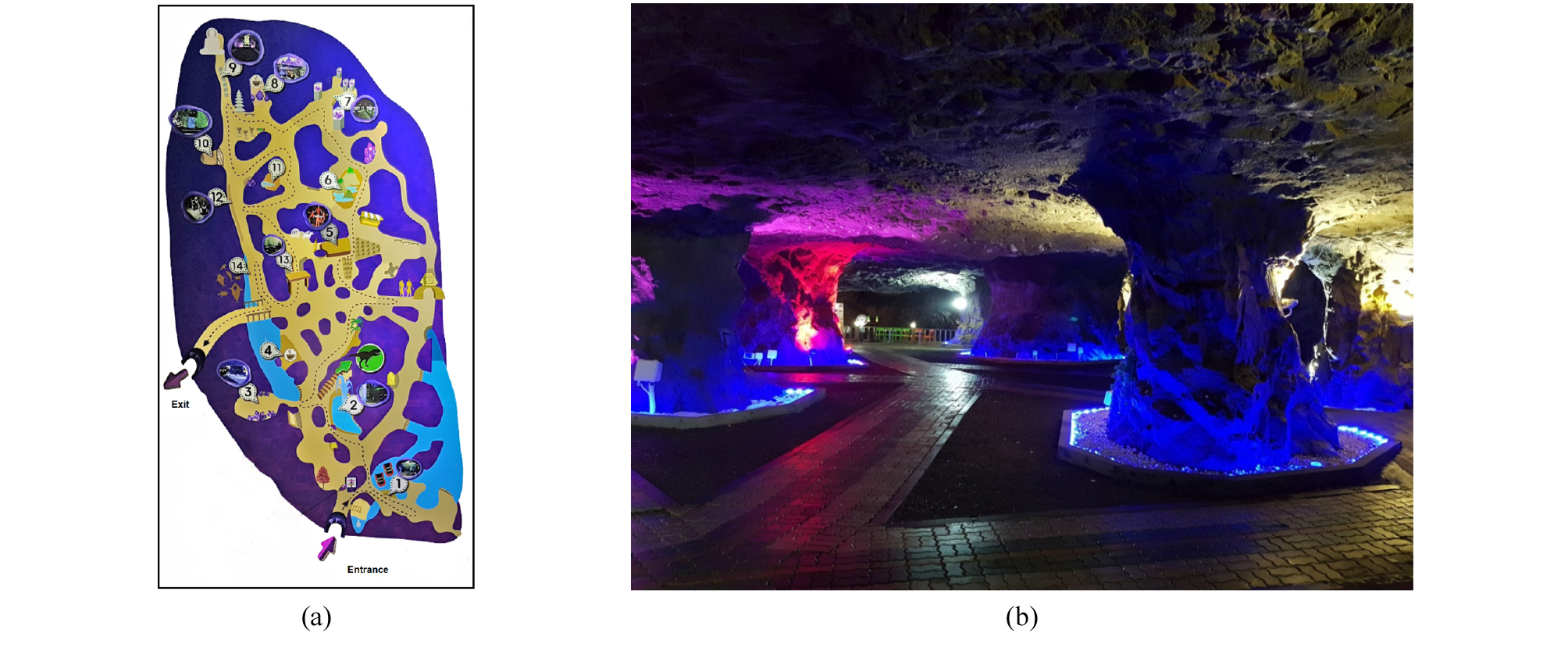
대한민국 울산광역시 울주군에 있는 폐광된 자수정 지하광산(35°32'43''N, 129°5'37''E)을 연구지역으로 설정하여 블루투스 비콘과 스마트폰을 이용한 BLE 신호의 RSSI 분포 특성을 조사하였다. 폐광산을 연구지역으로 선정한 이유는 현재 연구단계에서는 안전 문제로 인해 가행 광산에서 블루투스 비콘의 RSSI 측정실험을 수행하기 어려웠기 때문이다. Fig. 1은 연구지역의 도면과 광산 내부 모습을 보여준다. 광산의 내부 면적은 약 16,000 m2, 갱도 총 길이는 약 2.5 km, 갱도 평균 폭은 약 3.15 m, 갱도 평균 높이는 2~15 m이다. 광산 내부의 온도는 12~16°C 정도로 유지된다.
실험방법
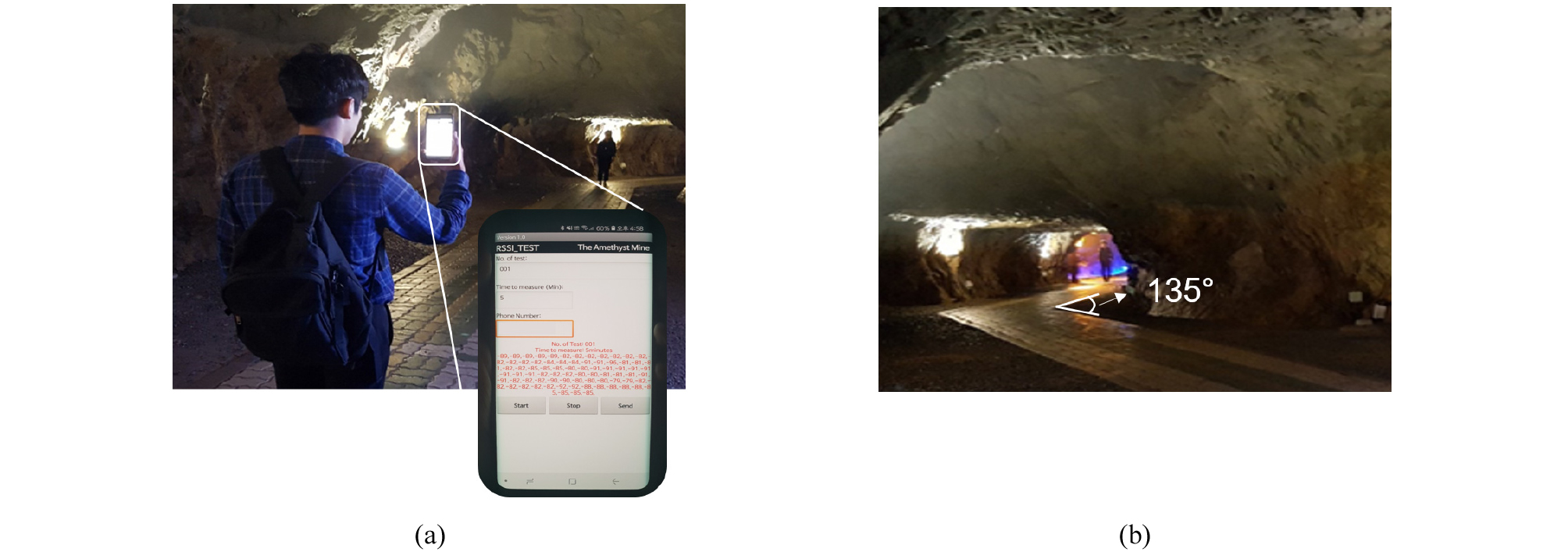
블루투스 비콘을 작업자 헬멧에 부착하였고, 블루투스 비콘으로부터 정면으로 10 m, 20 m 떨어진 지점에서 5분 동안 RSSI 분포를 조사하였다. Fig. 2는 직선 구간과 곡선 구간에서 블루투스 비콘과 스마트폰 애플리케이션을 이용하여 BLE 신호의 RSSI를 조사하는 모습이다. 직선 구간에서는 헬멧에 부착된 블루투스 비콘으로부터 일정 거리 이상 떨어진 지점에서 스마트폰을 통해 RSSI 분포를 조사하였다. 곡선 구간에서는 약 135°만큼 꺾인 지점에 블루투스 비콘을 설치하고 일정 거리 이상 떨어진 지점에서 스마트폰을 통해 BLE 신호를 수신하였다.
헬멧에 부착된 블루투스 비콘은 Perples에서 제조한 RECO 비콘이다(Reco, 2018). RECO 비콘은 대표적인 비콘 표준인 iBeacon과 Eddystone의 인증이 완료되었고, 한국, 미국, 유럽, 일본 등 주요국들에서 전파 인증을 받았다. Table 1은 RECO 비콘의 사양을 보여준다. 크기가 비교적 작고, 무게가 가벼워 헬멧에 부착하기 쉽다. 이 비콘은 송신하는 BLE 신호를 최대 4 dBm에서 최저 -16 dBm까지 4 dBm 단위로 조정할 수 있다.
Table 1. Specifications of the RECO beacons (Perples, Seoul, Korea)
BLE 신호의 RSSI 측정을 위해 이용된 스마트폰은 Samsung Galaxy S9이며, 측정값의 기록을 위해 자체적으로 개발한 애플리케이션을 사용하였다. 애플리케이션의 기능은 사용자가 지정한 시간 동안 BLE 신호의 RSSI 측정값을 스마트폰에 저장 및 가시화하고, 수집된 데이터를 리포트 형태로 공유하는 것이다.
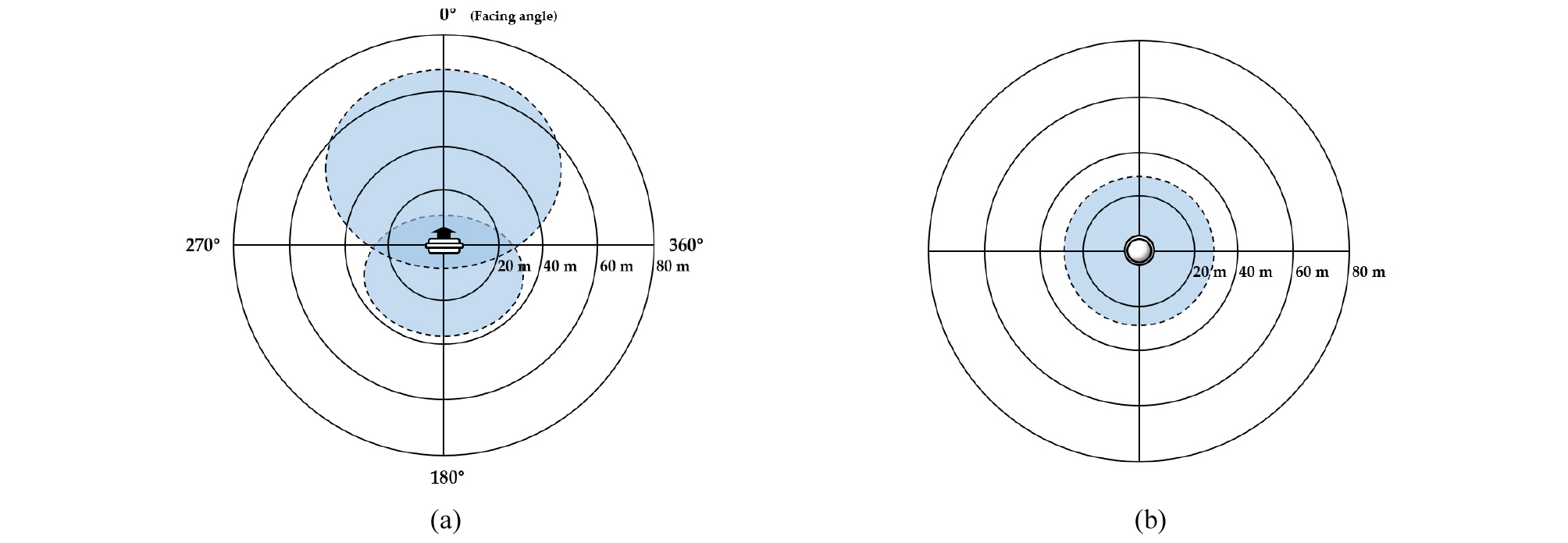
앞서 설명한 바와 같이 본 연구에 사용된 RECO 비콘의 BLE 신호 세기는 최대 4 dBm에서 최소 -16 dBm까지 4 dBm 단위로 설정할 수 있다. BLE 신호 세기를 높게 설정할수록 신호의 도달거리는 증가한다. Fig. 3은 RECO 비콘이 전방을 향하도록 설치되었을 때(지향성)와 상향으로 설치되었을 때(무지향성) 나타나는 BLE 신호의 최대 도달거리를 보여준다(RECO, 2018). 지향성 블루투스 비콘은 BLE 신호를 전방으로 전파하며, 무지향성 블루투스 비콘은 BLE 신호를 옆면으로 전파한다. RECO 비콘의 신호 세기가 -4 dBm일 때, 지향성 블루투스 비콘의 BLE 신호는 전면으로 최대 70 m, 후면으로 최대 40 m, 옆면으로 최대 30 m까지 전파될 수 있고, 무지향성 블루투스 비콘은 BLE 신호가 모든 방향으로 최대 30 m까지 전파될 수 있다.
실험은 세 개의 세트로 구성하였다. 첫 번째 실험에서는 무지향성 블루투스 비콘을 헬멧의 상부에 부착하고, BLE 신호 세기를 4 dBm, 0 dBm, -4 dBm으로 달리 설정하여 RSSI 분포를 조사하였다. 두 번째 실험에서는 지향성 블루투스 비콘을 헬멧의 전면에 부착하고, BLE 신호 세기를 4 dBm으로 고정한 후 블루투스 비콘과 스마트폰이 마주 보는 각도를 0°, 45°, 90°, 135°, 180°로 변화시키면서 RSSI 분포를 조사하였다. 이 실험은 지하광산 내부에서 블루투스 비콘을 소지한 작업자를 향해 트럭이 여러 방향에서 접근할 때 달라지는 RSSI 분포 변화를 조사하기 위한 것이다. 첫 번째와 두 번째 실험은 갱도 직선 구간에서 블루투스 비콘과 스마트폰이 서로 마주 보고 있을 때 수행하였다. 마지막 세 번째 실험에서는 무지향성 블루투스 비콘을 헬멧의 상부에 부착하고, BLE 신호 세기를 4 dBm으로 고정한 후 갱도 곡선 구간에서 RSSI 분포를 조사하였다. 이 실험은 지하광산 내 곡선 구간에서 트럭이 작업자를 향해 접근할 때 달라지는 RSSI 분포 변화를 조사하기 위한 것이다. RSSI 분포는 블루투스 비콘으로부터 10 m, 20 m 떨어진 지점에서 스마트폰 애플리케이션을 이용하여 측정하였으며, 모든 실험에서 같게 적용하였다.
실험결과
무지향성 블루투스 비콘의 RSSI 분포 분석 결과
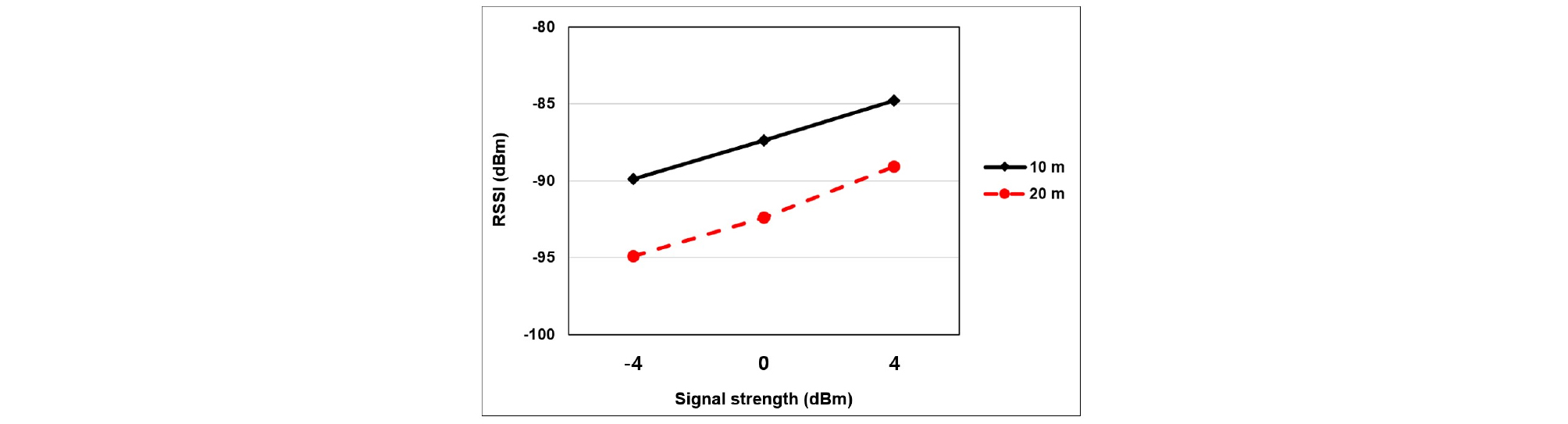
Table 2는 무지향성 블루투스 비콘의 BLE 신호세기를 달리 설정했을 때 분석된 RSSI 분포의 최대값, 최소값, 최빈값, 산술평균, 제1사분위수(Q1), 제2사분위수(Q2), 제3사분위수(Q3)를 산정한 결과이다. RSSI 통계 분석 결과, BLE 신호세기에 따라 스마트폰에 수신된 RSSI 값의 차이가 존재하는 것으로 나타났다. BLE 신호 세기를 4dBm으로 설정했을 때, 10 m 지점에서 측정된 RSSI 평균은 -84.8 dBm, 20 m 지점에서 측정된 RSSI 평균은 -89.1 dBm으로 분석되었다. BLE 신호 세기를 0 dBm으로 설정했을 때, 10 m 지점에서 측정된 RSSI 평균은 -87.4 dBm, 20 m 지점에서 측정된 RSSI 평균은 -92.4 dBm이었다. 마지막으로 BLE 신호 세기를 -4 dBm으로 설정했을 때에는 10 m 지점에서 측정된 RSSI 평균이 -89.9 dBm, 20 m 지점에서 측정된 RSSI 평균은 -94.9 dBm이었다.
Table 2. Results from statistical analysis of the RSSI distributions according to the different signal strengths of non-directional Bluetooth beacon
Fig. 4는 무지향성 블루투스 비콘의 BLE 신호 세기 조건에 따른 RSSI 측정값의 평균을 보여준다. 무지향성 블루투스 비콘은 BLE 신호 세기 조건에 상관없이 10 m 지점에서 측정된 RSSI 평균이 20 m 지점에서 측정된 RSSI 평균보다 더 높게 나타났다. 즉, 블루투스 비콘과 스마트폰 사이의 거리를 가깝게 설정할수록 스마트폰에는 더 높은 RSSI가 측정되었다. BLE 신호 세기가 -4 dBm에서 4 dBm으로 증가할수록 10 m 지점에서의 RSSI 평균과 20 m 지점에서의 RSSI 평균은 점차 증가하는 것으로 나타났다.
지향성 블루투스 비콘의 RSSI 분포 분석 결과
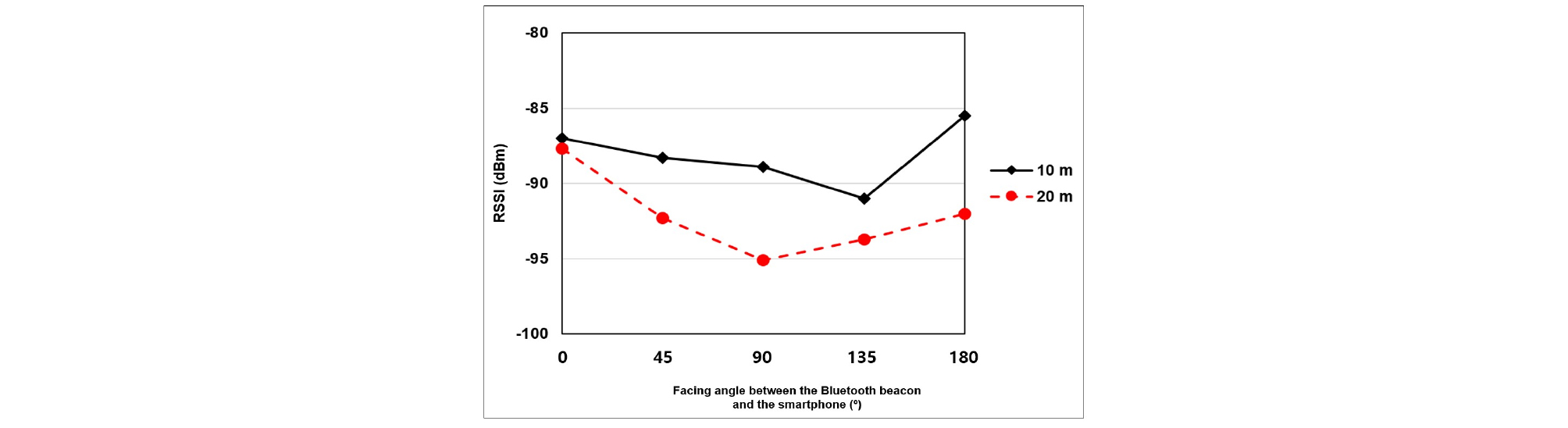
지향성 블루투스 비콘의 경우, 블루투스 비콘과 스마트폰이 마주 보는 각도가 0°에서 135°로 점차 증가할수록 10 m 지점에서의 RSSI 평균은 점차 감소하는 것으로 분석되었다. Table 3은 지향성 블루투스 비콘과 스마트폰 사이의 마주 보는 각도를 달리 설정했을 때 분석된 RSSI 분포를 나타내며, Fig. 5는 마주 보는 각도 조건에 따른 RSSI 평균의 변화를 보여준다. BLE 신호가 블루투스 비콘의 전면으로 전파되는 특성으로 인해 블루투스 비콘과 스마트폰 사이의 각도가 커질수록 스마트폰에 수신되는 RSSI 평균이 점차 감소하는 것으로 판단된다. 블루투스 비콘과 스마트폰이 마주 보는 각도가 180°일 때, 10 m 지점에서의 RSSI 평균은 -85.5 dBm으로 다시 증가하였다. 20 m 지점에서는 블루투스 비콘과 스마트폰 사이의 각도가 0°에서 90°로 점차 증가할수록 스마트폰에 수신된 RSSI 평균은 점차 감소하는 것으로 나타났다. 그러나, 각도가 135°와 180°로 증가했을 때, 20 m 지점에서의 RSSI 평균은 다시 증가하는 것으로 분석되었다. 지향성 블루투스 비콘은 각도 조건에 대해 뚜렷한 경향성이 없이 RSSI 분포가 변화하는 것으로 판단된다.
Table 3. Results from statistical analysis of the RSSI distributions according to the different facing angles between the directional Bluetooth beacon and the smartphone
곡선 구간 내 블루투스 비콘의 RSSI 분포 분석 결과
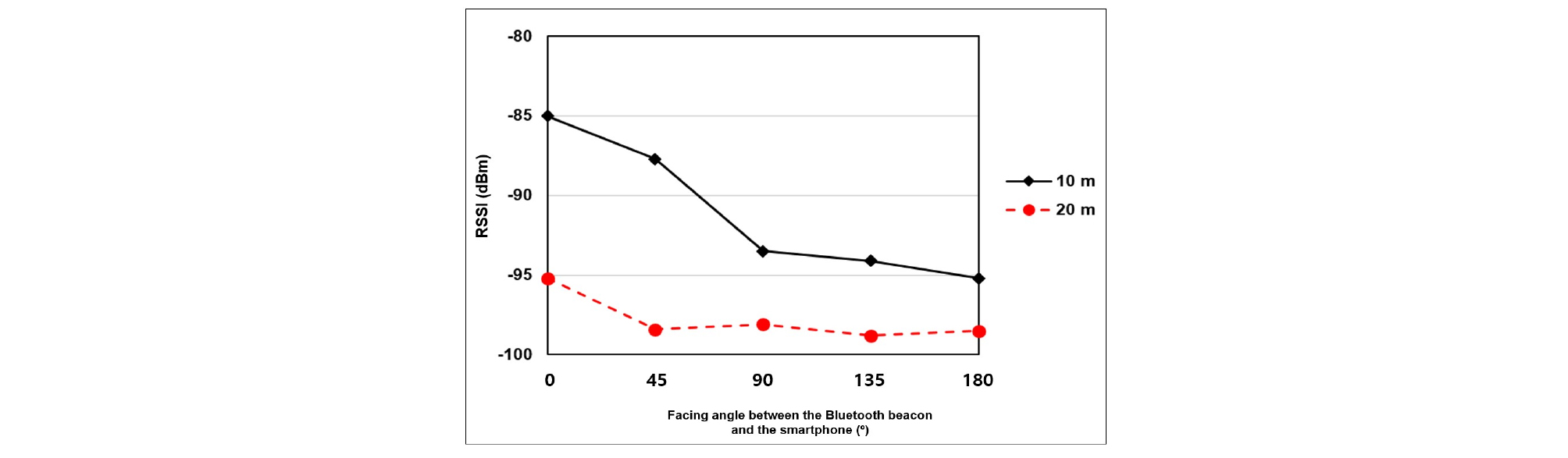
Table 4는 곡선 구간에서 무지향성 블루투스 비콘의 RSSI 분포를 분석한 결과이다. 곡선 구간 10 m 지점에서 측정된 RSSI 평균은 직선 구간 10 m 지점에서 측정된 무지향성 블루투스 비콘의 RSSI 평균과 비슷한 양상을 보인다. 그러나, 곡선 구간 20 m 지점에서 측정된 RSSI 평균이 -99.3 dBm으로 분석된 것으로 보아 곡선 구간에서는 블루투스 비콘과 스마트폰 사이의 거리가 멀어질수록 BLE 신호의 안정적인 수신이 어려운 것으로 판단된다.
Table 4. Results of statistical analysis of the RSSI distribution from the non-directional Bluetooth beacon at a curve section
| Tx -power | Facing angle | Range | Statistics (dBm) | ||||||
| Max | Min | Mode | Mean | Q1 | Q2 | Q3 | |||
| 4 dBm | 0º | 10 m | -75 | -93 | -80 | -81.5 | -83 | -81 | -79 |
| 20 m | -95 | -100 | -100 | -99.3 | -100 | -100 | -100 | ||
토의
본 연구에서는 지하광산과 지표면에서 스마트폰에 수신된 RSSI 값의 차이를 분석하기 위하여 같은 실험 조건으로 지표면의 열린 공간에서 RSSI 조사 실험을 수행하였다. 실험 지역은 대한민국 부산시 남구에 있는 부경대학교 대연캠퍼스(35°8'4'' N, 129°6'21'' E)이며, 블루투스 비콘으로부터 정면으로 10 m, 20 m 떨어진 지점에서 스마트폰 애플리케이션을 이용하여 5분 동안 RSSI 값을 측정하였다.
Table 5는 지표면의 열린 공간에서 실험을 통해 획득한 RSSI 통계 분석 자료이며, Fig. 6은 무지향성 블루투스 비콘의 BLE 신호 세기 조건에 따른 RSSI 평균 변화를 나타낸다. 무지향성 블루투스 비콘의 경우, 블루투스 비콘으로부터 10 m, 20 m 떨어진 지점에서의 RSSI 평균은 지하 공간에서 측정된 RSSI 평균과 비슷한 것으로 분석되었다. 지향성 블루투스 비콘과 스마트폰 사이의 마주보는 각도 조건을 달리 설정할 때 측정된 RSSI값의 통계 분석 결과는 Table 6에 제시하였다. Fig. 7은 각도 조건에 따른 RSSI 측정값의 평균 변화를 보여준다. 지향성 블루투스 비콘의 경우, 지하 공간에서 측정된 RSSI 평균과 지표면에서 측정된 RSSI 평균이 정확히 일치하지 않았다. 지하 공간과 지표면에서의 RSSI 분포의 차이가 발생하는 이유는 지하 공간에서는 지하 구조물들로 인해 BLE 신호의 난반사 현상이 발생하여 원활한 BLE 신호 수신이 어렵고, 지하 공간 내 지하수 유입으로 인한 높은 습도가 신호 수신에 영향을 미친 것으로 추정된다.
Table 5. Results from the statistical analysis of the RSSI distributions measured from the non-directional Bluetooth beacon in an open space
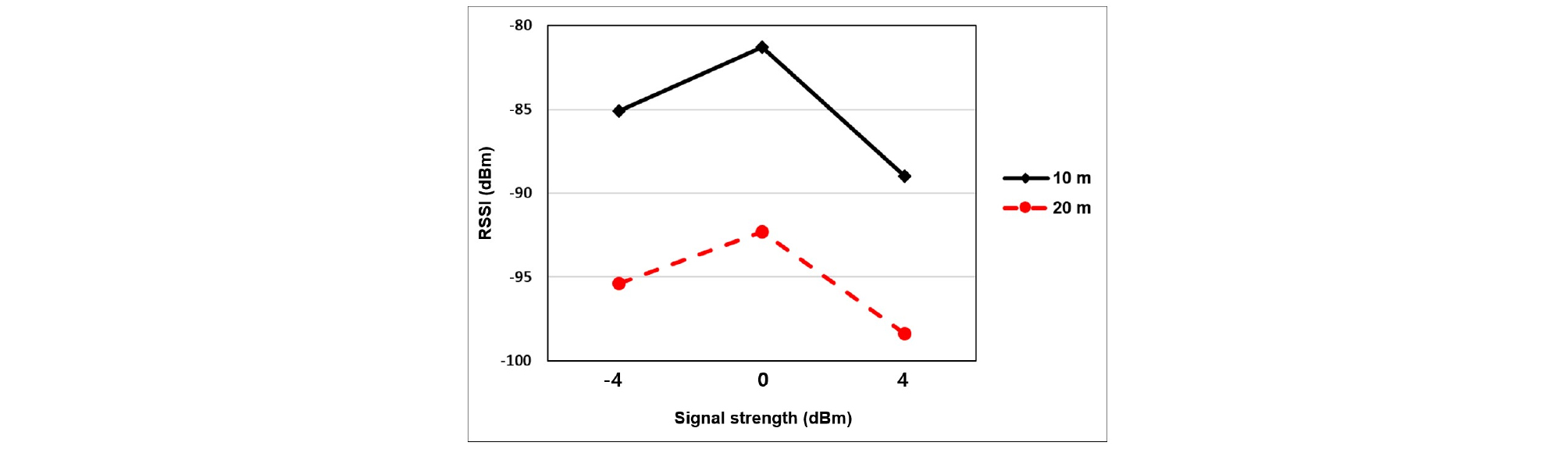
Table 6. Results from the statistical analysis of the RSSI distributions measured from the directional Bluetooth beacon in an open space
지하광산과 지표면에서 수행된 무지향성 블루투스 비콘과 지향성 블루투스 비콘의 RSSI 분포 실험의 결과를 고려했을 때, 지하광산용 블루투스 비콘 기반 PWS 개발을 위해서는 무지향성 블루투스 비콘을 활용하는 것이 더욱 합리적일 것으로 판단된다. 무지향성 블루투스 비콘의 RSSI 분포는 지하공간과 지표면에서 비슷한 경향을 띠고 있는 것으로 보아 무지향성 블루투스 비콘의 BLE 신호 송신은 지하 구조물에 대한 영향을 상대적으로 적게 받는 것으로 분석된다. 또한, 무지향성 블루투스 비콘은 BLE 신호를 옆면으로 전파하기 때문에 블루투스 비콘과 BLE 신호 수신기 사이의 배치에 큰 영향을 받지 않는다. 따라서 무지향성 블루투스 비콘을 이용할 경우 덤프트럭을 향해 양방향에서 접근하는 장비와 작업자 인식할 가능성이 더 클 것으로 판단된다.
결론
본 연구에서는 지하 자수정 폐광산을 대상으로 블루투스 비콘과 스마트폰을 이용하여 블루투스 비콘이 송신하는 BLE 신호의 세기 조건, 신호 전파 방향성, 비콘 설치 구간 특성 조건에 따른 RSSI 값의 분포 특성을 분석하였다. 실험을 위해 무지향성 블루투스 비콘의 BLE 신호 세기는 4 dBm, 0 dBm, -4 dBm으로 설정하고, 지향성 블루투스 비콘과 스마트폰이 마주 보는 각도를 0°에서 180°까지 45° 간격으로 달리 설정하였다. 또한, 직선 구간과 곡선 구간에 블루투스 비콘을 설치한 후, 블루투스 비콘으로부터 정면으로 10 m, 20 m 떨어진 지점에서 5분 동안 스마트폰 애플리케이션을 이용해 RSSI 분포를 측정하였다. 그 결과, 무지향성 블루투스 비콘과 스마트폰 사이의 거리를 가깝게 설정할수록 스마트폰에는 높은 RSSI가 수신되고, BLE 신호 세기를 높게 설정할수록 10 m 지점에서의 RSSI 평균과 20 m 지점에서의 RSSI 평균은 점차 증가하는 것으로 분석되었다. 지향성 블루투스 비콘의 경우에는 RSSI 값이 스마트폰과 비콘 사이의 마주 보는 각도에 상관없이 특정 경향성을 띠지 않은 채 변화하는 것으로 나타났다. 곡선 구간에서는 무지향성 블루투스 비콘과 스마트폰 사이의 거리가 20 m 이상 멀어질 때 원만한 BLE 신호 전파가 불가능한 것으로 분석되었다. 지하 공간과 오픈 공간에서의 RSSI 분포 비교 결과, 무지향성 블루투스 비콘의 RSSI 분포는 비슷한 패턴을 보이지만 지향성 블루투스 비콘의 RSSI 분포는 서로 일치하지 않는 것을 알 수 있었다.
BLE 신호 세기, 방향성, 비콘 설치 구간 특성 조건을 고려하여 RSSI 분포를 조사한 결과, 양방향에서 덤프트럭을 향해 접근하는 장비나 작업자를 인식하고 트럭 운전자에게 위험 알림을 제공하는 블루투스 비콘 기반의 PWS 설계를 위해 무지향성 블루투스 비콘을 활용하는 것이 더 효과적임을 알 수 있었다. 무지향성 블루투스 비콘은 BLE 신호를 비콘의 옆면으로 균일하게 전파하기 때문에 덤프트럭에 부착된 스마트폰은 장비나 작업자의 접근 방향과 관계없이 BLE 신호를 비교적 안정적으로 수신할 수 있을 것으로 판단된다.
블루투스 비콘 기반의 지하광산용 PWS는 기존에 지하광산에서 활용되고 있는 PWS 방법들과 비교하여 다음과 같은 장점이 있다. 블루투스 비콘은 코인 배터리를 통해 전력을 공급받기 때문에 지하광산 내 전력 공급을 위한 추가적인 전력망 구축이 필요하지 않다. 블루투스 비콘은 견고한 재질로 만들어져 온도와 습도의 영향을 덜 받기 때문에 지하광산 현장에 활용되기 적합하다. 또한, 블루투스 비콘은 다른 전자기 센서들과 비교했을 때 장비의 크기가 작고, 가격이 비교적 저렴하므로 무선 신호 송신기 설치를 위해 크고 무거운 안테나를 생산 장비와 광산 구조물에 설치해야 하는 문제를 해결할 수 있다.
본 연구에서 제시한 BLE 신호 세기, 방향성, 비콘 설치 구간 특성 조건에 따른 RSSI 변화 분석 결과는 블루투스 비콘 기반의 지하광산용 PWS 개발시 활용될 수 있을 것으로 기대한다.
