

서 론
자율주행 기술의 특징
자율주행 기술의 분류
자율주행 기술의 구성요소
자율주행 기술에 사용되는 센서의 종류 및 특징
자율주행 기술을 이용한 지하광산 갱도 맵핑
자율주행 기술을 이용한 지하광산 광석 운반
자율주행 기술을 이용한 지하광산 안전관리
토 의
결 론
서 론
자율주행 기술은 인간의 개입 없이 기계 스스로 주변 환경을 인식하고, 상황에 맞추어 목적지까지 자동으로 주행할 수 있는 기술이다(An et al., 2013). 1956년 GM 모터쇼에서 자율주행 기술의 개념이 처음 발표된 이후, 1984년부터 1994년까지 진행된 PROMETHEUS 프로젝트를 통해 고속도로를 주행할 수 있는 자율주행 자동차가 개발되었다(Kim and Kim, 2017). 최근에는 4차 산업혁명에서 비롯된 정보통신기술의 발달과 함께 다수의 다국적 기업들이 자율주행 기술에 관한 연구를 진행하고 있다(Kim and Huh, 2018; DAIMLER, 2019). 대표적으로 GM은 2008년 15개의 센서를 이용하여 주변 상황을 인식할 수 있는 자율주행 자동차 ‘BOSS’를 공개하였다. 또한, 고속도로 주행이 가능한 슈퍼 크루즈를 2022년까지 상용화할 계획이다(Lee, 2016). 현대자동차는 2015년 국내 최초로 도심 자율주행 기술을 선보였으며, 2030년까지 완전한 자율주행기술을 상용화할 계획이다(HYUNDAI, 2019).
광업 분야에서도 자율주행 기술을 현장에 도입하기 위한 다양한 연구들을 수행하고 있다. 예를 들어, Chi et al.(2012)은 거리를 측정할 수 있는 레이저 스캐너 센서와 차량의 위치를 인식할 수 있는 바코드 인식 기술을 활용하여 지하광산 환경에 활용 가능한 자율주행 시스템을 개발하였다. Grehl et al.(2015)은 지하광산에서 레이저 스캐너, 관성 측정 센서, 카메라 등의 센서를 탑재한 자율주행 로봇 ‘Alexander’를 개발하여 지하광산에의 3차원 맵핑 작업을 수행하였다. 또한, Volvo(2019)는 석회석 광산에서 6대의 자율주행 트럭을 활용한 운송 작업을 테스트하였으며, 2020년까지 운송 작업의 완전 자동화를 목표로 설정하였다.
이처럼 해외에서는 광업 분야에서 자율주행 기술을 활용하기 위한 연구가 활발하게 진행되고 있다. 그러나 국내 광업계에서는 자율주행 기술에 대한 이해와 연구가 부족한 실정이다. 따라서 본 연구에서는 자율주행 기술의 특징을 조사하였고, 자율주행 기술의 지하광산 활용사례들을 유형별로 분류하여 분석하였다.
자율주행 기술의 특징
자율주행 기술의 분류
자율주행 기술은 미국의 자동차기술학회(The Society of Automotive Engineers, SAE)가 정의한 6단계(Level 0∼5)로 분류할 수 있다(SAE, 2019). Fig. 1은 자율주행 기술의 수준별 분류와 주요 내용을 설명한다. 비자동화(No Automation)는 자동화 없이 운전자가 모든 것을 직접 운전하는 단계이며, 운전자 보조(Driver Assistance)는 운전자가 직접 운전을 하면서 시스템이 일정 부분을 지원해주는 단계이다. 부분 자동화(Partial Automation) 단계에서는 차량의 가속 및 조향제어의 일정 부분이 자동화되지만, 운전자는 항상 상황을 주시하고 있어야 한다. 조건부 자동화(Conditional Automation)는 운전자가 차량의 경고에 따라 차량을 제어할 준비는 해야 하지만, 상시 모니터링은 필요 없는 단계이다. 고도 자동화(High Automation)는 차량이 특정한 조건에 맞추어 모든 주행 기능을 수행하며 운전자가 차량의 주행 옵션을 변경할 수 있는 단계이며, 완전 자동화(Full Automation)는 차량이 모든 주행 기능을 완전히 수행하는 단계이다.
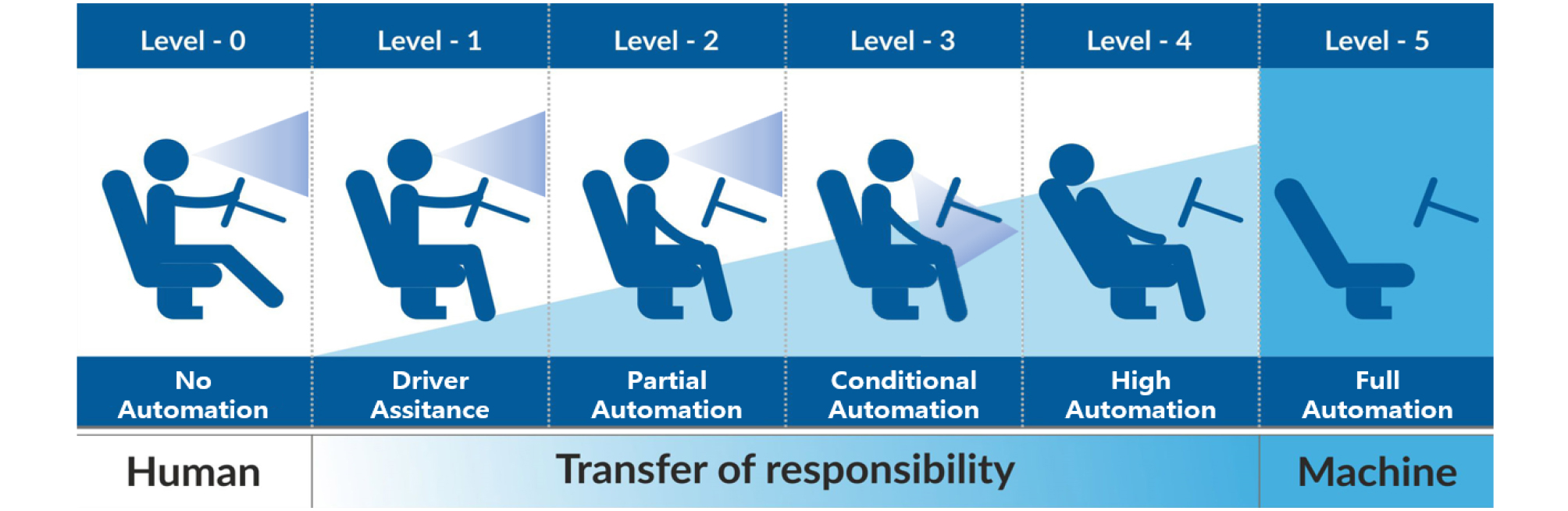
Fig. 1.
Levels of autonomous driving technology determined by The Society of Automotive Engineers (modified from NetApp, 2019).
자율주행 기술의 구성요소
자율주행 기술은 환경인식, 위치인식, 판단, 제어, 상호작용 등 5개의 핵심기술로 구성된다(An et al., 2013).
① 환경인식: 주변 환경을 인식할 수 있는 라이다(lidar), 레이다(radar), 비전 카메라(vision camera) 등의 센서들을 이용하여 차량이 목적지까지 이동하는 동안 나타나는 정적 장애물, 동적 장애물, 도로표식 등을 인식하는 기술이다.
② 위치인식: GPS(Global Positioning System), INS (Inertial Navigation System), 엔코더(encoder) 등을 활용하여 자율주행 차량의 절대/상대 위치를 인식하는 기술이다.
③ 판단: 목적지까지의 경로를 계획하고 주행 상황에 따른 행동(차선유지, 추월, 유턴, 비상정지 등)을 판단하기 위한 기술이다.
④ 제어: 지정한 경로를 따라 주행하기 위해 조향, 속도, 기어 등 액추에이터를 제어하기 위한 기술이다.
⑤ 상호작용: 인간-자동차 인터페이스(Human Vehicle Interaction, HVI)를 이용하여 운전자에게 정보를 제공하고, V2X(Vehicle To Everything) 통신을 통해 인프라 및 주변 차량과 주행 정보를 교환할 수 있는 기술이다.
자율주행 기술에 사용되는 센서의 종류 및 특징
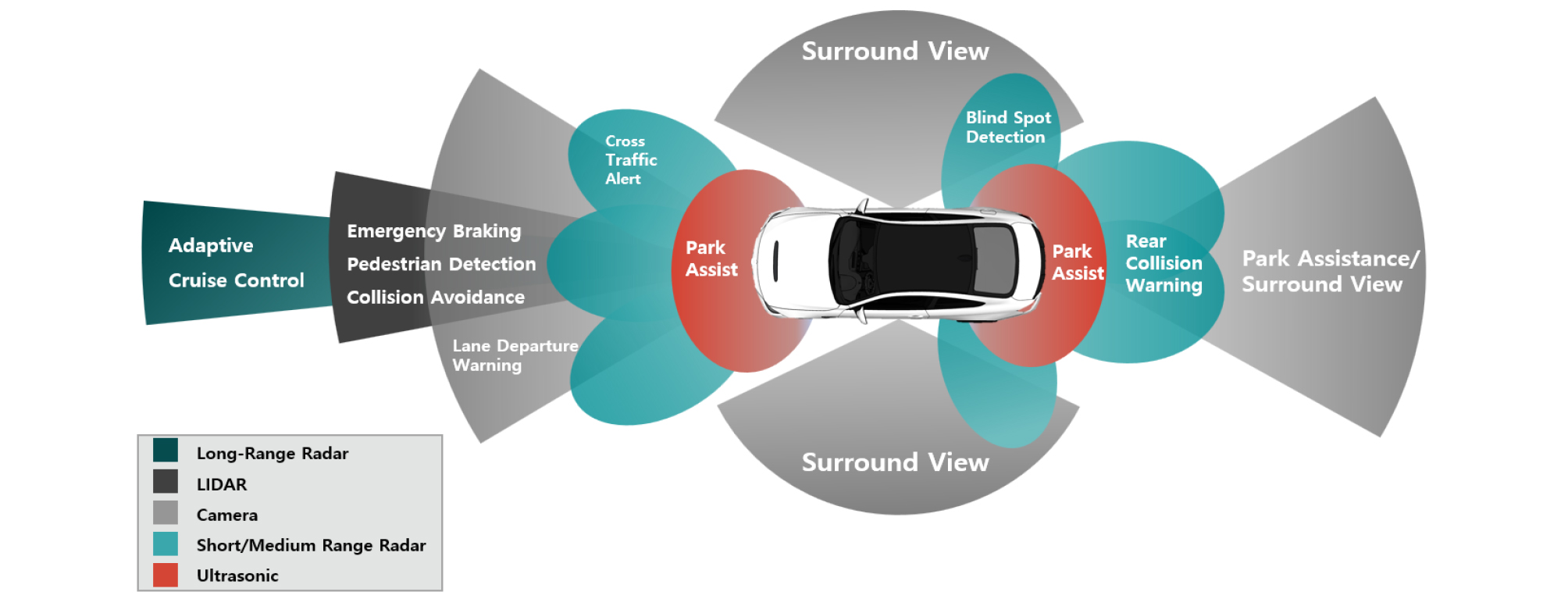
Fig. 2는 자율주행 기술의 구성요소 중 환경인식 기술의 구현을 위해 사용되는 초음파(ultrasonic) 센서, 장거리 레이더(long-range radar) 센서, 중/단거리 레이더(short/medium range radar) 센서, 라이다 센서, 카메라의 인식범위를 나타낸다. 초음파 센서는 초음파를 발생시켜 대상까지의 거리를 측정한다. 상대적으로 인지 거리가 짧으므로 자율주행 차량에 근접한 장애물을 인식할 때 사용된다. 레이더 센서는 전자기파를 발사하는 방식으로 대상까지의 거리를 측정한다. 장거리 레이더 센서는 중/단거리 레이더 센서보다 인식할 수 있는 범위가 넓어서 자율주행 차량이 원거리에 있는 다른 차량이나 장애물들을 인식할 때 사용된다. 라이다 센서는 물체에 레이저를 투사시켜 목표물까지의 거리, 방향 등을 측정한다. 비교적 넓은 범위의 탐지가 가능하고, 정확도가 높아 자율주행 차량이 보행자나 장애물을 인식할 때 사용된다. 비전 카메라는 넓은 범위의 인식이 가능해 차선 및 전반적인 주행환경을 인식할 때 사용된다.
그 외에도 차량의 위치를 인식하기 위한 GPS 센서, 차량의 가속도 및 각속도를 측정할 수 있는 관성 센서(Inertia Measurement Unit, IMU), 차량의 회전을 측정할 수 있는 자이로(gyro) 센서, 차량의 이동 거리를 측정할 수 있는 휠 엔코더(wheel encoder) 등도 자율주행 기술의 구현을 위해 사용된다.
각각의 센서들은 서로 다른 탐지 거리, 분해능, 화각을 가지며 날씨, 광원의 세기 등 주변 환경의 영향에 따라 센서의 사용이 제한되는 때도 있다. 이럴 때 여러 종류의 센서들을 함께 사용하면 각각의 센서들이 가지는 한계점을 상호 보완할 수 있다(Hong, 2011). 예를 들어 전반적인 주행환경을 인식할 수 있는 비전 카메라는 우천이나 안개와 같은 열악한 기상 조건에서는 충분한 성능을 내지 못하지만, 레이더 센서의 경우 기상 조건과 관계없이 우수한 성능을 보인다. 따라서 이들 센서를 함께 사용하면 자율주행 기술을 구현하는데 필요한 기능 및 성능을 확보할 수 있다. Table 1은 자율주행 기술에서 대표적으로 사용되는 센서들의 종류와 각각의 특징을 요약한 것이다.
Table 1. Types of sensors used in autonomous driving technology and their characteristics
자율주행 기술을 이용한 지하광산 갱도 맵핑
Fig. 3은 Baker et al.(2004)가 개발한 지하광산용 자율주행 차량 플랫폼 ‘Groundhog’를 보여준다. Groundhog는 지하광산의 내부의 벽이 무너져 내리거나 예기치 못한 장애물이 나타나더라도 주행할 수 있도록 높은 차대 위에 필요한 센서들이 탑재하도록 설계되었다. 차량에는 거리를 측정할 수 있는 라이다 센서, 공기 질을 측정할 수 있는 가스 센서, 광산 내부를 촬영할 수 있는 저조도 카메라, 지반 함몰 여부를 확인할 수 있는 sinkage 센서, 방향을 측정하는 자이로 센서, 무선 이더넷 통신 장비 등이 탑재된다.

Fig. 3.
View of autonomous driving vehicle platform ‘Ground hog’ designed for surveying and mapping in underground mines (Baker et al., 2004).
Groundhog에는 통신상태가 불안정하거나 갱내의 주행환경이 안전하지 않을 경우를 대비하여 3가지의 기능이 적용되었다.
∙ 차량 전면에 탑재된 라이다 센서만을 이용하여 경로를 탐색한 후 복귀하는 ‘Aggressive Return’ 기능
∙ 폭발을 감지하였을 때 폭발이 끝날 때까지 외부 전원을 차단하고 기다리도록 하는 ‘Hazard Idle’ 기능
∙ 차량이 자율주행을 인지할 수 있는 무선통신의 범위를 벗어나면 자율주행 모드가 종료되고 원격조종 모드로 전환되는 ‘Teleoperation’ 기능
Bakambu and Polotski(2007)는 지하광산 내부를 탐사, 측정할 수 있는 자율주행 시스템을 개발하였다. 개발된 시스템은 크게 탐사, 자율주행 두 가지의 모드로 운영된다. 탐사 모드에서는 운전자가 차량을 원격으로 조종하면서 라이다 센서를 활용하여 지하광산의 데이터를 획득하고 이를 처리하여 2, 3차원의 지도를 생성한다.
자율주행 모드에서는 기작성된 지도를 바탕으로 운전자가 설정한 경로에 따라 차량이 스스로 주행한다. 이 모드에서는 차량이 도착지점까지 이동하는 동안 수평 방향의 라이다 센서를 활용하여 장애물을 인지하며, 교차로를 발견할 때는 사전에 설정한 방향으로 이동하도록 설계되었다. 또한, 자이로 센서, 클리노미터, 휠 엔코더를 이용하여 GPS 없이 자체적으로 차량의 위치를 추적할 수 있다. 그러나 자율주행을 위해서는 지하광산 내부의 지도 작성이 사전에 수행되어야 하며, 평평하지 않은 도로에서는 장애물의 감지가 어렵다는 등의 한계가 있었다.
Fig. 4는 Neumann et al.(2014)가 회전 가능한 라이다 센서를 이용하여 지하광산 갱도를 맵핑할 수 있도록 개발한 자율주행차량 플랫폼을 보여준다. 개발된 플랫폼에는 로봇 운영 체제(Robot Operating System, ROS)가 적용되었다. 휠 엔코더를 활용하여 차량의 주행거리를 측정하며, 방향 센서를 사용하여 주행거리 측정 정확도를 개선했다.
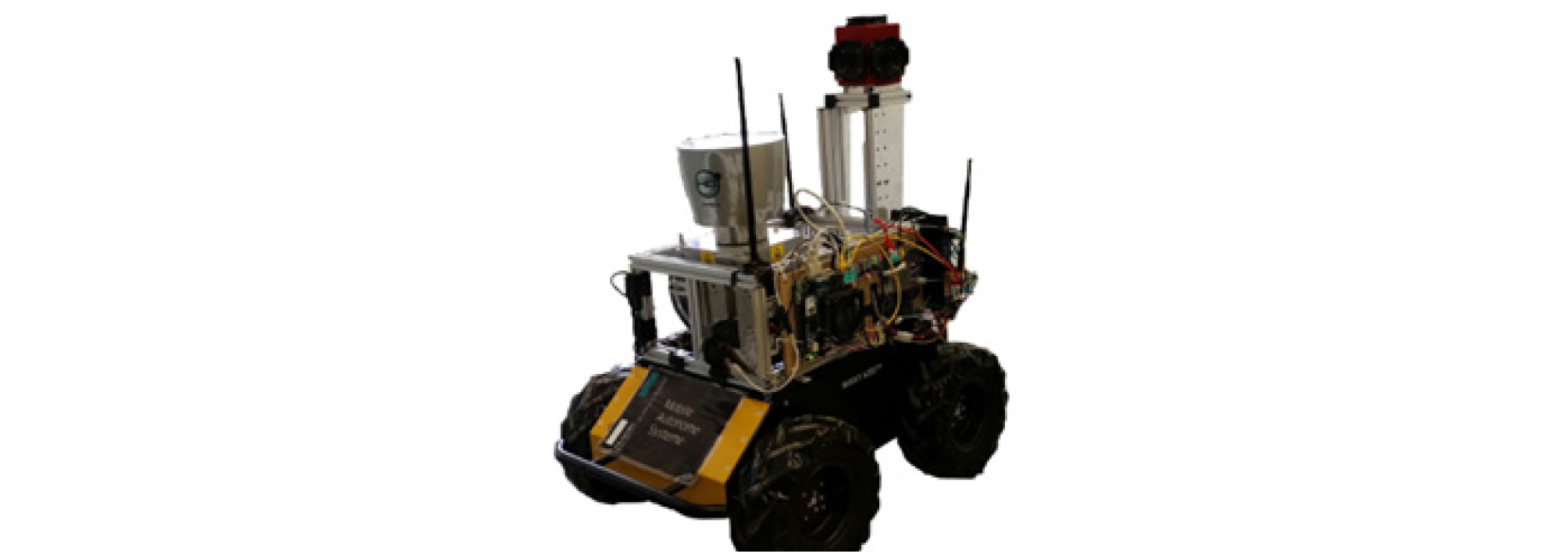
Fig. 4.
View of autonomous driving vehicle ‘Barney’ designed for underground mine mapping (Neumann et al., 2014).
수평 방향으로 회전하는 라이다 센서를 수직 방향으로 회전시키기 위해 틸트 유닛(tilt unit) 장치를 활용하였다. 그 결과 차량이 이동하는 구간보다 더 넓은 범위의 구간을 측정할 수 있었다. 지하광산 갱도 맵핑 작업은 0°에서 90°까지 기울기를 5° 단위로 조정하면서 측정하는 ‘stop-and-go’ 방식과 0°에서 90°까지의 기울기를 연속으로 조정하면서 라이다 센서가 나선형으로 움직이도록 하는 ‘continuous scan’ 방식이 모두 적용되었다.
개발된 자율주행 시스템은 고성능의 라이다 센서와 이를 회전시킬 수 있는 틸트 유닛 장치를 활용하여 대규모 지하광산의 3차원 갱도 맵핑 작업을 신속하게 수행할 수 있었다. 그러나 3차원 갱도 맵핑 성과물에 대한 정확도 검증은 이루어지지 않았다.
Fig. 5는 Ghosh et al.(2016)가 다중 센서 데이터의 융합을 통해 차량의 위치 및 움직임을 측정하면서 지하광산의 갱도를 3차원 맵핑할 수 있도록 개발한 자율주행 로봇을 보여준다. 지하광산 내부에서는 GPS를 이용한 위치 파악이 불가능하며, 갱도면의 상태가 고르지 않아 경계지점 표식을 인식하여 위치를 파악하는 것 또한 쉽지 않다. 개발된 시스템은 이러한 한계를 극복하기 위해 3축 가속도계와 3축 각속도계를 내장한 관성 센서를 이용하였다. 그 결과 차량의 3차원 각도와 각속도를 측정한 뒤 이를 적분하여 속도와 자세를 측정할 수 있었고, 지하광산 내부에서 차량의 위치를 실시간으로 추정할 수 있었다. 또한, 차량에 부착된 축 인코더에 측정된 값들을 이용하여 오차를 보정하는 방식으로 위치 추정의 정확도를 개선하였다.
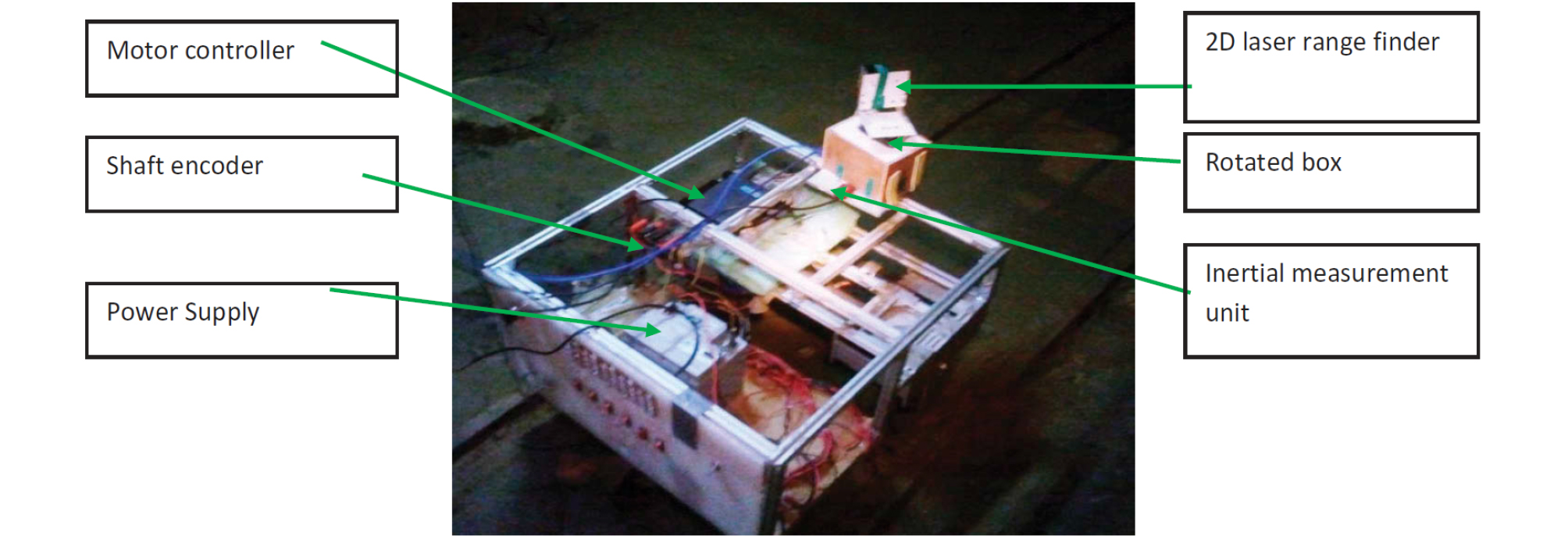
3차원 갱도 맵핑을 위해서는 추정된 차량의 위치정보와 라이다 센서로부터 측정된 갱도면까지의 거리 정보를 사용하였다. 그러나 3차원 갱도 맵핑 과정에서 획득되는 데이터의 양에 따라 차량 CPU(Central Processing Unit)의 연산량도 급격하게 증가하여 대규모 지하광산 현장에는 적용하기 어려운 한계를 나타냈다.
자율주행 기술을 이용한 지하광산 광석 운반
Larsson et al.(2005) 은 지하광산용 자율주행 로더 장비를 개발하였다. GPS가 없는 지하광산에서 장비의 위치를 인식하기 위해 전자태그 중의 하나인 Radio Frequency IDentification(RFID)를 사용하였다. RFID 태그는 가격이 저렴하고 지하광산 현장에도 설치가 쉽다. 탑재된 라이다 센서에서 취득되는 데이터를 퍼지 로직 기법을 이용하여 처리하여 자율주행 로더를 제어하였다.
Marshall et al.(2008)은 지하광산 현장에서 자율주행이 가능한 Load-Haul-Dump(LHD) 장비를 개발하고 실험을 통하여 현장 적용 가능성을 평가하였다. 개발된 LHD는 Fig. 6과 같이 크게 3가지의 단계로 구동되었다.
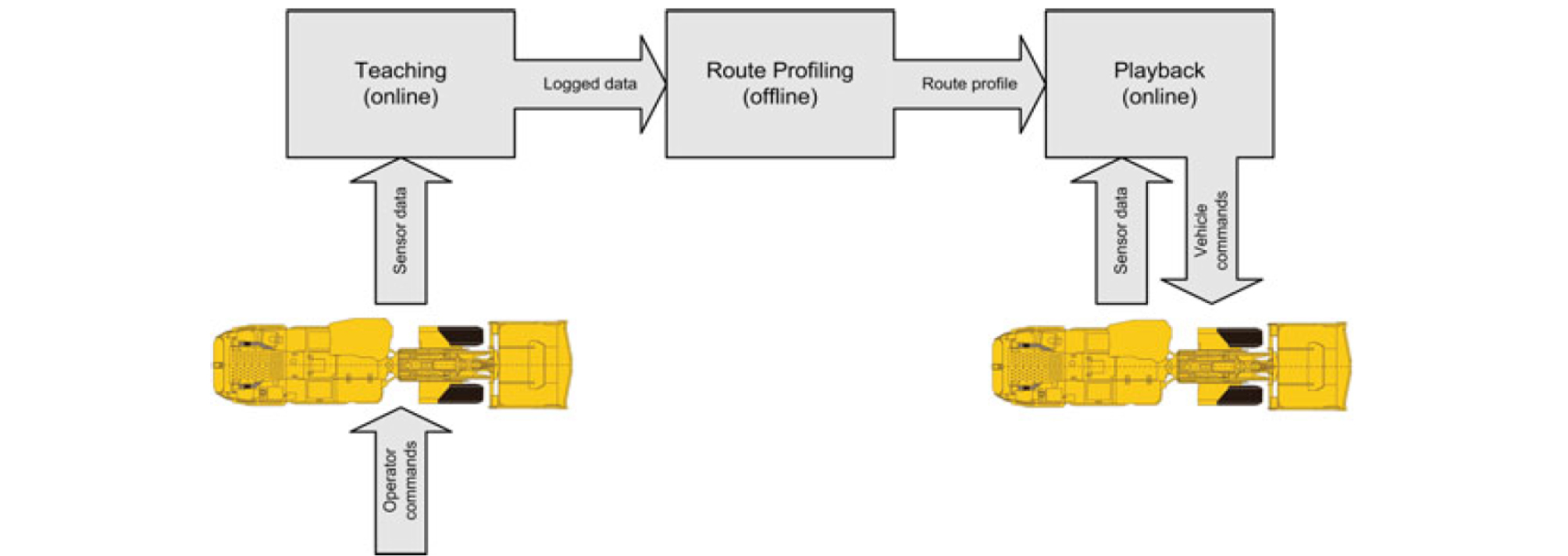
∙ Teaching: 운전자가 정해진 경로에 따라 LHD 장비를 원격으로 조종한다. 장비가 주행하는 동안 장비의 전면에 부착된 라이다 센서, 차량의 전, 후방부의 각도를 측정하는 힌지 엔코더, 차량의 이동 거리를 측정하는 샤프트 엔코더 등으로부터 장비가 주행하는 동안의 데이터가 기록된다.
∙ Route Profiling: Teaching 단계에서 기록된 데이터를 자율주행 알고리즘에 적합한 형태로 전처리한다. 전처리된 데이터를 알고리즘에 입력하여 이동경로, 일시정지 지점 등 LHD 장비의 자율주행에 필요한 정보를 분석한다.
∙ Playback: 이전 두 단계를 통해 획득된 데이터를 이용하여 경로 프로파일링을 실행시킨다. 경로 프로파일링이 실행되는 동안 차량의 주행 각도, 속도 등에 대한 오류를 예상하고 경로 추적, 차량의 위치 추적 등의 기능을 실행한다.
개발된 자율주행 LHD는 실제 광산 현장에서 효율적으로 광석을 운반했으며, 경로 이동의 정확도 또한 높은 것으로 평가되었다. 그러나 자율주행을 구현하기 위해서는 Teaching 단계에서 원격 조정을 통한 현장 데이터 획득을 사전에 수행해야만 한다는 점에서 한계가 있었다.
Fig. 7은 MobileTronics(2019)가 철로가 없는 지하광산 현장에서 광석 운반 작업을 수행할 수 있도록 개발한 자율주행 열차 ‘VirtuRail’를 보여준다. VirtuRail은 5량의 열차로 구성되어 있으며 전체 길이는 약 60m이다. 차축은 모두 18개이며, 모든 차축이 첫 번째 차축의 트랙을 정확하게 따라가도록 설계하였다. 열차 전방과 측면에 부착된 라이다와 레이더 센서들을 이용하여 지하광산 갱도 벽면으로부터의 거리를 측정하고, 벽면까지의 일정한 거리 수준을 유지하면서 자율주행이 가능하도록 하였다. 또한, 열차의 이동 경로에 전자표지판을 설치하여 열차의 위치를 인식한 후 주행에 필요한 설정들이 자동으로 변경할 수 있도록 하였다.

VirtuRail은 열차가 이동하기 위한 철로가 필요하지 않으므로 철로를 설치하거나 유지 관리할 필요가 없다. 따라서 철로가 없는 지하광산 현장에서도 사람의 개입 없이 광석 운반 작업을 효과적으로 수행할 수 있다.
자율주행 기술을 이용한 지하광산 안전관리
지하광산에서는 심도가 깊어질수록 지표와의 온도차가 크고, 상대습도 또한 매우 높은 상태로 유지된다. 갱내에서 흐르는 물은 pH가 낮은 경우가 많아 장비나 시설물들의 부식, 합선 등을 일으킬 수 있다. 또한, 일산화탄소, 메탄 등과 같은 유해 가스 등이 발생할 수 있다. 따라서 작업자들이 안전한 환경에서 근무하기 위해서는 지하광산 환경에 대한 정기적인 조사와 관리가 필요하다.
Fig. 8은 Zhao et al.(2017)가 지하 석탄광산에서 안전사고가 발생했을 때, 사고 현장을 조사할 수 있도록 개발한 자율주행 로봇 ‘MSRBOTS’를 보여준다. MSRBOTS는 원격조종과 자율주행 두 가지 모드로 작동된다. 원격조종 모드에서는 원격으로 연결된 컨트롤러를 통해 운전자가 직접 로봇의 이동을 제어한다. 자율주행 모드에서는 로봇의 이동속도와 회전각 정보를 이용하여 로봇 스스로 자신의 위치를 추정하며, 직진하거나 회전할 때 모두 일정한 속도로 이동할 수 있다. 또한, 목적지까지 이동하여 임무를 완수하면 다시 출발지점으로 돌아오도록 설계되어 있어 효과적으로 지하광산 내부를 조사할 수 있다.

MSRBOTS는 양방향 오디오와 2개의 카메라를 활용하여 현장의 데이터를 실시간으로 획득할 수 있다. 차량의 위치 및 자세 등을 추정하여 차량을 제어하기 위해 자이로 센서, 전자 나침반, 적외선 센서 등을 탑재하였다. 또한, 온도 센서, 습도 센서, 기압 센서, 가스 센서 등을 활용하여 사고 현장의 환경 인자들을 측정할 수 있다.
지하광산에서 사고가 발생했을 경우 내부의 상황과 위험 정도를 예측하기 어려우므로 인명 구조를 위한 접근이 쉽지 않다. MSRBOTS와 같은 탐사로봇을 활용하여 지하광산 내부를 조사함으로써 지하광산의 안전관리 및 구조작업의 효율성을 개선할 수 있었다.
Günther et al.(2019)은 지하광산 내부의 온도, 습도, 가스농도 등과 같은 환경 인자들을 측정하여 원격으로 전송할 수 있는 자율주행 시스템을 개발하였다. 개발된 시스템은 라이다 센서를 활용하여 갱도 벽면까지의 거리를 측정하며 동시에 3차원 깊이 측정이 가능한 RGB-D 카메라를 활용하여 이동 방향 전방에 있는 장애물을 감지하였다. 황화수소, 질소산화물, 일산화탄소 등 다양한 유독가스의 농도를 측정할 수 있는 가스 센서와 온도 센서, 습도 센서, 기압 센서, 풍속 센서, 수질 측정 센서 등이 탑재되어 지하광산의 다양한 환경 인자들을 동시에 측정할 수 있었다. 또한, 6LoWPAN(IPv6 over Low Power Wireless Personal Area Network) 기반의 통신환경 구축을 통해 그 결과를 무선 전송할 수 있었다.
토 의
본 연구에서 분석한 광업 분야 자율주행 기술의 개발 사례들을 Table 2에 요약하였다. 지하광산의 갱도 맵핑, 광석 운반, 안전관리의 목적으로 자율주행 기술이 적용되고 있었으며, 그중에서도 지하광산 갱도를 2, 3차원 형태로 맵핑하기 위해 자율주행 기술이 활용되는 경우가 많았다. 또한, 광산에서 발생할 수 있는 예기치 못한 위험요소들로부터 차량을 신속히 복귀시키기 위해서 대부분 자율주행 모드뿐만 아니라 원격조종 모드를 함께 사용했다.
Table 2. Summary of Autonomous vehicle technology in mining industry
| Reference | Application | Vehicle | Mode | Sensor |
| Bakambu and Polotski, 2007 | Mapping | Mobile robot |
Tele-control/ Autonomous |
Lidar Gyro Inclinometer |
| Baker et al., 2004 |
Mapping/ Environmental exploration | Mobile robot |
Tele-control/ Autonomous |
Lidar Low-light Camera Gyro Gas and sinkage sensors |
| Ghosh et al., 2016 | Mapping | Mobile robot | Autonomous |
Lidar Shaft encoder IMU |
| Neumann et al., 2014 | Mapping | Mobile robot | Autonomous |
Lidar Camera IMU Wheel encoders |
| Marshall et al., 2008 | Transport | Load-Haul-Dump |
Tele-control/ Autonomous |
Lidar Drive shaft encoder Hinge angle encoder |
| Larsson et al., 2005 | Transport | Mobile robot | Autonomous |
Lidar sensor Wheel encoder RFID |
| Mobile Tronics, 2019 | Transport | Train |
Tele-control/ Autonomous |
Lidar Radar Camera RFID |
| Günther et al., 2019 | Environmental exploration | Mobile robot |
Tele-control/ Autonomous |
Lidar RGB-D camera Temperature, humidity, air pressure, gas sensors |
| Zhao et al., 2017 | Environmental exploration | Mobile robot |
Tele-control/ Autonomous |
Camera, Two-way audio, Infrared sensor, Temperature, humidity, wind speed, air pressure sensors |
지하광산에서는 GPS를 이용한 위치 인식이 불가능하므로 차량의 위치를 인식하기 위해서 RFID, IMU 센서, Gyro 센서 등과 같이 차량의 상대적인 위치를 추정할 수 있는 센서들이 주로 사용되었다. 또한, 지하광산 갱도를 자율주행하면서 동시에 맵핑하는 SLAM(Simultaneous localization and mapping) 기술이 적용되는 경우도 다수 확인할 수 있었다. 주변의 환경을 인식하기 위해서 라이다 센서가 자율주행 차량에 대부분 탑재되었고, 가스센서, 습도센서 등을 비롯한 여러 종류의 환경 센서들도 사용되었다.
Fig. 9는 광업 분야 이외에 타 분야에서 도심지에서 운영되는 자율주행 차량을 대상으로 한 기술개발 사례들을 보여주고 있다. 국내의 연구사례로서 국민대학교 무인차량 연구실에서는 현대자동차의 그랜저 HG330 차량을 개조하여 자율주행 자동차 ‘KUM’을 개발하였다(Kim, 2015). 개발된 자율주행 차량은 비전 카메라를 기반으로 하여 차량이 주행하는 동안 차선 및 장애물뿐만 아니라 보행자, 도로표지판 등을 인식할 수 있다. Unmanned Solution(2019)은 운전석 없이 완전한 형태의 자율주행 기술을 구현할 수 있는 자율주행 셔틀 WITH:US를 개발하였다. WITH:US는 5G 네트워크 기반의 원격관제 시스템을 통해서 안전한 운행환경을 조성하며, 인공지능(Artificial Intelligence, AI) 기반의 콘텐츠를 제공함으로써 탑승객들에게 더욱 편리한 서비스를 제공할 수 있다.

타 분야의 기술개발 사례를 보면 자율주행 기술과 차세대 이동통신망인 5G 기반의 관제 시스템, 인공지능 등의 기술을 결합함으로써 더욱 안전하고 효율적인 주행환경을 구축할 수 있었다. 광업 분야의 자율주행 로봇은 라이다 센서를 이용하여 장애물까지의 거리를 측정한 후 이를 회피하는 것이 주된 목적이지만, 타 분야의 자율주행 기술은 라이다, 레이더와 같은 거리측정 센서뿐만 아니라 실시간으로 물체 및 글자를 인식할 수 있는 컴퓨터 비전 기반의 카메라 센서 기술을 활용함으로써 보다 광범위하게 주변 환경을 인식할 수 있었다. 따라서 광업 분야에서도 자율주행 기술을 효과적으로 적용하기 위해서는 기존에 사용되던 기술을 발전시키는 것뿐만 아니라, 인공지능, 컴퓨터 비전과 같은 새로운 기술들과의 융합이 필요할 것으로 판단된다.
결 론
본 연구에서는 자율주행 기술의 특징과 광업 분야 활용사례들을 정리하고 분석하였다. 자율주행 기술은 1950년대에 처음 선보인 이래로 센서, 통신기술의 발달과 함께 다양한 형태로 발전해왔다. 자율주행 기술은 운전자의 역할과 자동화의 수준에 따라 6단계 분류되고 있으며, 5가지의 핵심기술(환경인식, 위치인식, 판단, 제어, 인터랙션)을 필요로 하였다. 또한, 환경과 위치 인식을 위해 다양한 종류의 센서들(라이다, 레이더, 카메라, 초음파 센서)이 융합되어 사용되었다.
광업 분야에서 자율주행 기술을 활용한 사례들을 조사한 결과, 지하광산의 갱도 맵핑, 광석 운반, 광산 안전관리를 위해 자율주행 기술이 활용되고 있었다. 특히, 타 분야에서 적용되는 일반적인 자율주행 기술과는 달리 광업 분야에서는 사람이 접근하기 힘든 곳을 조사하기 위한 자율주행 로봇의 형태로 활용되는 경우가 많았고, 예기치 못한 상황에 대비하여 원격조종 모드를 보완적으로 사용하고 있었다. 또한, 지하광산에서는 GPS의 사용이 불가능하므로 차량의 위치를 추정하기 위한 다양한 센서 기술들이 적용되었다.
해외 광업 분야의 경우 자율주행 기술을 적용한 연구들이 이미 수행되었기 때문에 현장에서 발생할 수 있는 문제점들을 찾아내고 그에 맞춘 해결방안들이 제시되고 있다. 그러나 국내 광업 분야의 경우 현재까지 자율주행 기술을 적용한 연구사례가 없었다. 따라서 앞으로 자율주행 기술을 국내 광업 분야에 적용하기 위해서는 체계적인 기술개발과 함께 현장에서 발생할 수 있는 문제점들을 찾아내기 위한 노력이 필요할 것으로 판단된다.
광업 분야에서 자율주행 기술을 활용할 경우 로더나 트럭과 같은 채광 장비들이 운전자의 휴식 없이 지속적으로 운행될 수 있으며, 운반 장비의 작업시간을 규칙적으로 관리할 수 있기 때문에 광산의 생산성을 향상시킬 수 있다. 또한, 사람이 접근하기 힘든 지역을 자율주행 로봇이 대신하여 탐사할 수 있어서 작업자의 안전을 확보할 수 있다. 따라서 향후 광업 분야에서 자율주행 기술의 활용도는 점차 커질 것으로 예상한다.
