

서 론
본 론
방향성시추의 개요
초기 방향성시추 기법
공저 이수모터를 이용한 방향성시추 기법
RSS(rotary steerable system)를 이용한 방향성시추
최신 방향성시추기법
방향성 및 수평시추 시 고려사항
결 론
서 론
최근 미국을 중심으로 셰일·치밀 가스 및 오일 등 비전통자원 개발이 활성화 되면서 방향성 및 수평시추기술에 대한 관심이 고조되고 있다. 일반적으로 셰일·치밀 가스 및 유전 등과 같은 비전통자원의 경우 저류층이 치밀하여 저류층 내에 가스나 오일의 유동이 잘 이루어지지 않아 생산이 어렵다. 따라서 유동성 개선을 위해 수평시추를 실시하여 유체와의 접촉면적을 넓혀줘야 한다.
수평시추기술은 대표적인 방향성시추의 한 방법으로 유전개발에 처음 도입된 것은 1929년 미국의 유전에서였다(Felczak et al., 2012). 그 이후 이 기술은 꾸준히 발전되어 최근 북미지역 셰일·치밀가스 및 유전 개발의 활성화에 견인차 역할을 담당하고 있다(Jones et al., 2012).
이 기술의 발전은 방향제어 기술의 발전과 그 궤를 같이하고 있다. 방향제어 기술은 1920년대에 들어서면서 석유개발 산업에 본격적으로 도입되었다. 초창기에는 시추공저장비(BHA; Bottom Hole Assembly)의 기학적 배치를 이용하거나, 시추파이프의 회전속도 및 시추비트에 전달되는 하중을 조절하거나, 물리적인 힘을 비트에 직접 가할 수 있는 지지대를 시추공에 설치하거나, 또는 원하는 방향으로 고압의 유체를 분사시킴으로써 방향성시추를 가능케 하였다(Bourgoyne et al., 1986).
1960년대에 들어서면서 석유개발 업계에서는 더 복잡한 궤도로의 방향성 및 수평시추를 위해 공저이수모터(bottom hole mud motor)를 사용하기 시작하였다. 그러나 이 기법도 더욱 복잡한 시추궤도와 수평 장공시추시에 시추자가 계획한 궤도로의 방향성시추를 시행하는데 있어서 한계점이 드러나 이를 해결하기 위해 1990년대에는 방향제어시스템(RSS; rotary steerable system)이 개발되었다(Johnston and Allan, 1999). 그 후 이 기술은 계속 발전하여 현재에는 PRSS(powered rotary steerable system) 기법 및 하이브리드 RSS 기술로 발전되기에 이르렀다(Felczak et al., 2012).
이 연구에서는 비전통자원개발 산업에 필수적인 방향성 및 수평시추에서 적용되고 있는 방향제어기술의 원리와 장단점을 기술 발달과정과 함께 고찰하였다. 또한, 각 기술별 적용 시 주의할 점도 살펴보았다.
본 론
방향성시추의 개요
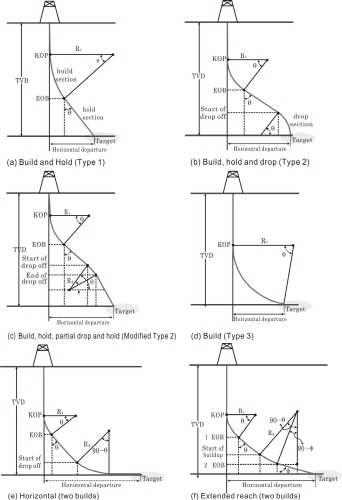
방향성시추는 지상에서 수직으로 시추한 후 발기점(kick off point; KOP)에서부터 목표지점까지는 방향성시추를 진행하는 기술로 수평시추는 방향성시추의 한 방법이다. 방향성시추 시 지상의 시추지점에서 목표지점에 도달할 수 있는 시추궤도는 수 없이 많이 존재한다. 그러나 실제 방향성시추에서 목표지점에 도달하기 위한 최적의 시추궤도는 시추장비의 기계적 특성, 시추이수의 비중 및 지층조건에 따른 시추공 안정성 등과 같은 조건에 의해 몇몇의 제한적인 궤도로 한정된다. 일반적으로 방향성시추의 궤도는 경사를 증가(build angle) 시키거나 감소(drop angle) 시키면서 목표지점에 도달하는 경로이다. Fig. 1은 2차원 평면상에서 도식적으로 표현할 수 있는 방향성시추궤도(drilling trajectory)들을 나타낸 것이다. 여기서 Fig. 1(a)에서 Fig. 1(c)까지는 방향성시추 괘도를 나타낸 것이고, Fig. 1(d)에서 Fig. 1(f)까지는 수평시추의 궤도를 나타낸 것이다(Choi, 2011).
수평시추 기술은 1891년 미국의 John Smalley Campbell 기술의 특허등록으로 세상에 알려졌다. 이 기술이 실제 유전개발에 도입된 것은 1929년 Texas주 Texon 인근 유전에서였다. 이 기술이 도입된 초창기에는 수평시추 길이가 몇 미터 정도로 짧았으나, 최근 기술이 발달되면서 수평시추의 총 길이(measured depth)는 40,502 ft (12.34 km)까지 이르게 되었다(Mantle, 2013).
이와 같은 수평시추 기술의 발달은 기존 유가스전들의 수직시추공이 포화상태에 이르게 되어 신규 시추가 어려운 지역에서 기존 수직시추공에 여러 방향으로 방향성시추를 하는 다가지시추(multi-lateral drilling)를 가능케 하고 시추공정 당 생산면적의 증가를 필요로 하는 비전통자원을 경제성 있게 개발할 수 있게 하고 있다.
석유가스개발에서 방향성시추는 규모가 작은 여러 저류층을 하나의 시추를 통해 상호 연계하여 개발하거나, 암염저류층 인근의 하부에 위치한 다수의 저류층을 동시에 개발할 때 주로 하게 된다(Hariri et al., 2012). 최근에는 비전통유가스전의 치밀한 저류층으로부터 생산성을 높이기 위해 수압파쇄기술과 함께 수평시추 기술이 적용되고 있다(Fonseca, 2014).
방향성시추에 있어서 시추궤도에 따른 시추공 안정성 분석(wellbore stability analysis)은 시추공이 붕괴되지 않으면서 목표지점까지 시추하기 위해서 시행된다. 시추공 안정성 분석은 암석역학적 응력측정을 시작으로 안정성에 필요한 시추인자를 파악하는 작업이다. 이때 시추인자들에는 시추궤도(방위각 및 경사각)와 최소요구시추이수비중(minimum required mud weight)등이 포함되어 있다. 이와 같은 시추공 안정성 분석은 셰일가스전 및 유전 개발 시에 주로 수행된다(Kim and Min, 2012; Lee et al., 2009; Lee et al., 2012; Yoon et al., 2013).
초기 방향성시추 기법
|
(a) |
|
(b) |
Fig. 2. A directional drilling technique in early days, (a) bent sub type, (b) whipstock type (Downton et al., 2000; Gafield and McKenzie, 2008). |
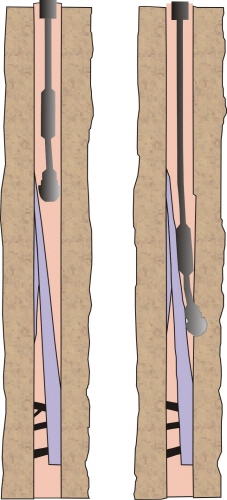
전통적으로 석유 및 가스 개발을 위한 시추는 수직시추에서 시작하였다. 1920년대에 들어서면서 수직시추기술로는 개발할 수 없는 유가스전 개발을 위해 방향성시추 기술이 필요하게 되었다. 초창기 방향성시추는 시추공저장비의 기하학적 배치나 시추파이프의 회전속도, 시추비트에 전달되는 하중을 조절하는 방식으로, 시추비트 상부의 시추공저장비 장착 구간의 스태빌라이저의 위치를 다양하게 배치함으로 구현할 수 있었다(Fig. 2(a)). 이 후에는 전향쐐기 (whipstock)와 같이 물리적인 힘을 비트에 직접 가할 수 있는 지지대 장비를 방향전환이 필요한 지점에 설치하여 방향성시추를 구현하였다(Fig. 2(b)) (Downton et al., 2000; Gafield and McKenzie, 2008).
이와 같은 초창기 방향성시추 기법은 시추 깊이 당 방향각을 일정한 각도 이상으로 증가 시킬 수 없었기 때문에 좀 더 복잡한 방향성시추 시에 계획된 시추 궤도를 따라 시추를 할 수 없었다. 이 방법들은 또한 공저장비에 추가적인 측정장비를 설치되지 않았기 때문에 지질학적인 장애물이 나타나거나 원하지 않는 궤도로 시추가 진행되는 경우 즉각적인 대응이 불가능하고, 방향전환 시 매번 시추공으로부터 시추파이프를 꺼내어 스태빌라이저의 위치를 변경하거나 전향쐐기를 다시 설치해야했다. 이 같은 작업은 전반적인 시추 기간을 연장시켜 이로 인해 시추 굴진율이 낮아져궁극적으로는 시추비용을 상승시키는 원인이 되어왔다.
공저 이수모터를 이용한 방향성시추 기법
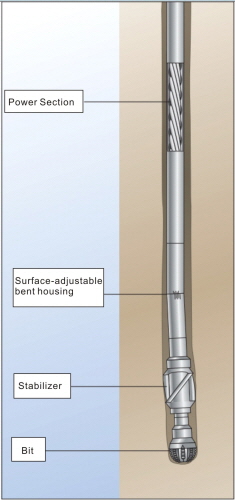
방향성시추기술이 석유개발에 도입된 이후, 석유업계는 복잡하게 계획된 궤도를 따라 방향성 및 수평시추를 시행할 수 있기를 원했다. 하지만 초기의 방향성시추기법은 이러한 요구를 충족시키지 못하였다. 이러한 요구를 충족시키기 위하여, 1960년대에 방향성시추 공정에 공저이수모터(bottom hole mud motor)를 사용하게 되었다. 초기의 공저이수모터는 터빈모터를 사용하였으나, 이후에는 효율성이 양호한 용적형이수모터(positive displa-cement motor)가 사용되었다. 이 방법은 현재까지도 널리 쓰이고 있는데, 이를 이수모터라고 한다. 이수모터를 장착한 공저장비의 구조는 Fig. 3과 같다.
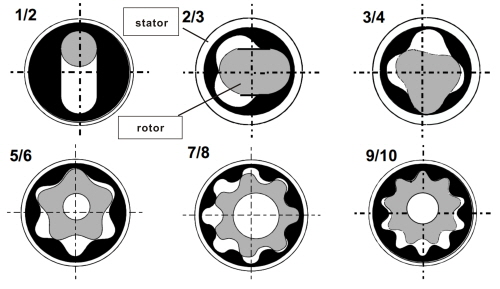
시추공저장비에서 동력공급구간(power section)에는 이수모터가 위치한다. 이수모터는 로토(rotor)와 스테이터(stator)로 이루어졌다(Fig. 4). 시추관으로부터 시추이수가 동력공급구간으로 유입되면, 시추이수는 스테이터를 따라 나선형 회전을 하며 로토를 편심회전(eccentric rotation) 시킨다. 편심회전을 하는 로토로 인해 발생된 회전력은 전달축(input shaft)을 통해 원심회전(concentric rotation)으로 변환되어 구동축(drive shaft)으로 전달된다. 구동축에 의해 전달된 회전력은 비트를 회전시켜 굴진을 하게 된다(Regener et al., 2005).
|
Fig. 3. A bottom hole assembly using positive displacement motor for directional and horizontal drilling, (a) Bottom hole assembly configuration with PDM (Felczak et al., 2012). |
|
Fig. 4. Various stator and rotor configuration (Regener et al., 2005). |
|
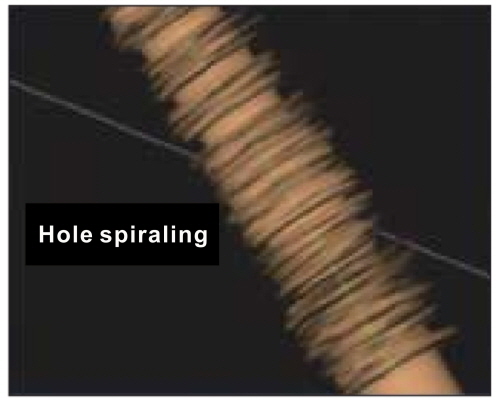
Fig. 5. Hole spiraling effect due to mud motor (Williams, 2004). |
시추공의 방향전환은 동력공급구간과 시추비트 상부의 스태빌라이저 사이에 위치한 덮개관(bent housing)에 의해 이루어진다. 덮개관은 0°에서 4°도 사이까지 구부러질 수 있으며, 덮개관의 각도 조정은 필요한 각도 증가율에 따라 지표에서 시추작업을 시작하기 전에 조정한다. 덮개관 내부에는 이수모터의 회전력을 비트에 전달해 주는 유니버서 조인트가 있고 이수모터 위에 설치되는 MWD(measurement while drilling)에는 여러 측정 센서가 내장되어 시추공의 위치와 방향 정보를 측정하여 텔레미터 장비를 통해 지표로 송신한다.
공저이수모터를 이용한 방향성시추는 두 가지 방식으로 진행된다. 첫 번째 방식은 전통적인 수직시추와 동일하게 데릭타입 시추리그의 회전테이블이나, 탑드라이브(Top drive)에 의해 비트의 회전동력을 발생시켜 수직시추 구간만을 굴착하는 방식이다. 두 번째 방식은 미끄럼시추(sliding mode drilling) 방식으로 탑드라이브에 의한 시추관의 회전을 멈춘 상태에서 공저장비에 장착된 이수모터만을 이용하여 방향전환 구간을 시추하게 된다. 목표한 경사각 또는 수평 구간에 도달하게 되면 다시 탑드라이브를 이용해 시추관을 회전시켜 직선구간 및 수평구간을 시추하게 된다.
공저이수모터를 이용한 방향성시추 방식의 장점은 목표한 궤도에 따른 방향성시추가 용이하다는 점이다. 지표에서 각도 조정이 가능한 덮개관을 이용하여 시추자(driller)는 목표한 각도 증가율(build-up rate) 대로 방향성시추를 진행할 수 있다. 이때 시현 가능한 각도증가율은 최대 15°/100 ft(30.48 m)까지 가능하다. 이 같은 높은 각도증가율로 인해 공저이수모터를 이용한 방향성 시추는 최근까지 육해상 유전에서 다가지시추 시에나 셰일 가스/유전의 패드타입시추(pad drilling)에서 쓰이고 있다. 이와는 별도로 이 장치는 CTD 시스템을 이용한 방향성시추에도 많이 사용되고 있다.
하지만, 공저이수모터를 이용한 방향성시추는 해결되어야 할 단점 또한 많이 가지고 있다. 첫째, 굴진율(rate of penetration)이 상당히 저하된다는 점이다. 굴진률 저하 요인 중 하나는 시추관이 회전하지 않는 다는 점이다. 시추관이 회전하지 않으면 시추관이 시추공의 정중앙에 위치하지 않고 시추공 단면의 하부로 치우치게 된다. 시추관이 시추공 하부에 치우치게 되면 시추이수는 시추단면의 하부에서 순환속도가 저하되고 시추암편(drilling cutting)이 하부에 쌓이게 되며, 이로 인해 시추관과 공벽(wellbore wall)의 마찰력이 증가되어 비트에 전달되는 하중을 적게 받게 되어 굴진율이 저하된다. 둘째, 시추공 환경의 악화된다는 것이다. 시추공 환경의 악화 요인은 직선구간이나 수평구간에서의 회전시추로 인해 발생한다. 공저장비는 구부러진 덮개관으로 인해 1°도에서 4° 정도 구부러져 있어 회전시 시추공은 Fig. 5와 같이 나선형이 된다. 이와 같은 나선형 시추공은 계획된 시추공의 직경보다 다소 확장된 형상을 만들게 된다. 나선형 시추공은 유정이나 가스정 완결작업을 어렵게 하며 저류층 물성값 오류를 유발하는 원인이 된다. 즉, 나선형 시추공일 경우 유정완결을 위한 시멘팅 작업을 어렵게 하며, 물리검층 값의 오차가 나타나게 된다(Williams, 2004).
RSS(rotary steerable system)를 이용한 방향성시추
RSS를 이용한 방향성시추는 1990년대에 상업화가 시작되어 현재까지 사용되는 기술이다. RSS는 낮은 굴진율과 비트로의 하중전달이 잘 이루어지지 않는 공저이수모터 방식의 단점을 극복하고자 고안되었다. RSS와 공저이수모터 방식의 가장 큰 차이점은 RSS는 방향 전환 시나 각도 증가 시, 시추파이프의 회전을 멈추지 않아도 된다는 점이다. 이때 시추비트에 전달되는 회전력과 하중은 시추리그에 위치한 회전테이블 또는 탑드라이브를 통해 이루어진다.
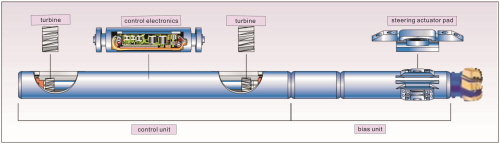
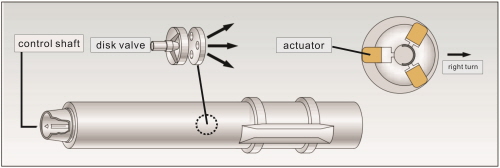
RSS는 방향전환 메커니즘에 따라 두 가지 타입으로 나누어진다. 첫 번째는 push-the-bit RSS 타입으로 구조는 Fig. 6과 같다. Fig. 6에서 볼 수 있는 바와 같이, 이 장비의 구조는 바이어스 유닛(bias unit) 부분과 컨트롤 유닛(control unit) 부분으로 나뉜다. 바이어스 유닛은 세 방향으로 갈라진 패드와 밸브들로 구성되어 있다. 세 방향으로 갈라진 패드는 시추비트에 아주 근접한 상부에 위치하며 밸브를 통하여 유입되는 시추이수의 압력으로 패드가 팽창하면서 시추공벽에 측력을 가하게 된다. 패드의 상부에 위치한 밸브는 패드에 유입되는 이수의 양을 조절하여 방향전환 시 Fig. 7과 같이 원하는 방향의 패드가 팽창되도록 한다. 직선구간 또는 수평구간을 시추 하는 경우에는 밸브가 각 패드에 고르게 이수를 유입시켜 모든 방향에 측력을 똑같은 힘으로 가하여 비트가 기울어지지 않고 시추공의 정중앙에 위치하게 된다. 바이어스 유닛의 밸브는 입력축(input shaft)을 통해 컨트롤 유닛과 연결된다. 컨트롤 유닛은 입력축을 통하여 바이어스 유닛의 밸브를 제어한다. 컨트롤 유닛은 시추 전에 미리 설계된 프로그램에 따라 작동되며 시추자가 원하는 궤도로 방향성시추가 진행 되도록 패드로의 이수유입을 제어한다. 컨트롤 유닛은 또한 삼축 가속도계(three- axis accelerometer)와 자력계(magnetometer)와 같은 방향 감지기들을 갖추고 있어, 비트의 방향, 각도, 입력축의 방향 등과 같은 정보를 측정하고 측정된 정보를 공저장비 상부에 위치한 MWD에 전달하게 된다. 컨트롤 유닛의 전력은 유닛 양 끝 쪽에 장착된 터빈이 회전하면서 생산된 전력에 의해 공급된다(Downton et al., 2000).
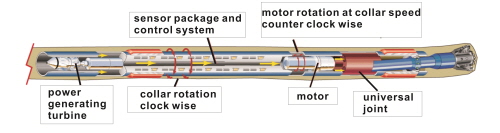
두 번째 타입의 RSS는 point-the-bit 타입이다. 이 타입의 방향전환 메커니즘은 공저이수모터의 방식과 다소 유사하다. point-the-bit 타입 RSS의 구성 요소 중 방향제어 섹션(steering section)에는 유니버설 조인트가 설치된다. 유니버설 조인트의 역할은 비트에 필요한 하중을 전달하며 방향전환 시 비트의 축을 원하는 방향으로 고정시키는 것이다. 이 타입의 RSS는 시추파이프와 시추칼라(drilling collar)가 회전하므로 축을 고정시키기 위하여 유니버설 조인트 상부에 모터를 장착한다. 모터는 시추파이프와 같은 회전율로 시추파이프의 반대방향으로 회전하여 축을 고정시켜 방향을 제어한다. 이에 필요한 모든 동력은 최상부에 위치한 동력공급 섹션의 터빈모터로부터 전달된다(Fig. 8)(Schaaf et al., 2000).
|
Fig. 7. Control unit controls the mud inflow into bias unit to activate actuator to orient the bit (Downton et al., 2000). |
|
Fig. 8. Bottom hole assembly of ‘point-the-bit’ system (Schaaf et al., 2000). |
RSS를 이용한 방향성시추의 장점은 시추파이프가 방향전환 시에도 멈추지 않고 끊임없이 회전한다는 점이다. 시추파이프가 회전함으로써 공저이수모터를 이용하는 방법에서 문제시 되었던 많은 문제점들이 해결된다. 즉, 시추파이프의 회전은 시추이수의 순환을 원활하게 도와주어 시추암편을 보다 효율적으로 지상으로 제거할 수 있게 해준다. 또한 시추파이프의 회전은 시추공벽과 시추파이프 사이의 마찰력을 감소시켜 굴진율을 향상 시킨다. 특히 push-the-bit 타입 RSS는 시추관의 회전력이 비트에 전달되므로 굴진율이 높아짐으로써 수평 장공시추에 효율적이게 된다.
RSS를 이용한 방향성시추에는 또한 단점도 있다. 먼저 push-the-bit 타입의 경우, 방향전환 및 제어 능력이 저하된다. 방향 전환 시 패드의 측력만을 의지하기 때문에 각도 증가율이 3°-6°/100 ft로 공저이수모터 방식에 비해 현저히 낮아진다(Warren, 2006). 또한 패드가 팽창하면서 공벽에 측력을 가하기 때문에 방향제어가 공벽의 상태에 전적으로 의존하게 된다. 즉, 공벽의 상태가 무르거나 고르지 못할 경우, 각도 증가율과 방향전환 능력이 제대로 발휘되지 않는다. 석유개발 산업계에서는 push- the-bit 타입의 각도 증가율과 방향전환 수행능력을 향상시키기 위하여 바이어스 유닛이 시추파이프와 같이 회전하지 않고 멈춰있는 장비(non-rotation sleeve)를 장착하기도 한다. 하지만 이 역시 패드의 측력이 공벽에 의존하는 현상을 해결하지는 못하였다. push-the-bit 타입의 RSS를 장착한 시추장비의 경우 비트를 회전하기 위해서 상당히 높은 회전력이 요구된다. 특히 방향성 및 수평시추 구간에서는 더 많은 회전력이 요구된다. 높은 회전력을 발생시키기 위해서는 시추리그의 규모와 용량이 커야한다는 제한이 존재한다. 또한 강한 회전력을 요하는 시추작업으로 인해 시추파이프의 진동과 충격이 RSS 장비에 전달되어 고장이 잦게 된다.
최신 방향성시추기법
최근 석유개발업계에서 최신의 방향성시추기술에 대한 요구가 매우 증가되고 있다. 즉, 지질학적 정보가 충분하지 않은 상황에서 시추 진행 시 장애구간을 만났을 때의 신속한 방향전환, 셰일가스 및 유전과 같은 비전통자원의 효율적인 생산을 위한 급격한 각도증가율을 발휘해야하는 경우 각도증가율을 높일 수 있는 역량, 수평 장공시추 능력, 시추비용 절감을 위한 굴진율의 향상, 그리고 장비의 신뢰성 및 내구성 등과 같은 요구 등이 늘어나고 있다.
이러한 요구를 충족하기 위해 기존의 공저이수모터방식이나 RSS 방식을 개선하고자 하는 노력이 이루어지고 있다. 최신 방향제어기술은 크게 두 가지로 나누어진다.
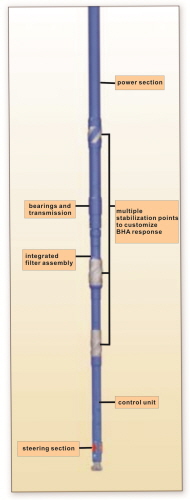
첫 번째 방식은 PRSS(powered rotary steerable system) 방식이다. PRSS 방식은 기존의 push-the-bit 타입의 RSS에 향상된 공저이수모터를 결합한 방법이다. PRSS의 공저 장비는 Fig. 9와 같다. 공저 장비의 최상부에 위치한 동력공급섹션(power section) 부분은 기존의 공저이수모터와 유사하다. 동력공급섹션의 로토 회전으로 인하여 발생된 회전력은 하부에 위치한 베어링과 전달장치(transmission)를 통해 최하부의 시추비트에 전달된다(Copercini et al., 2004).
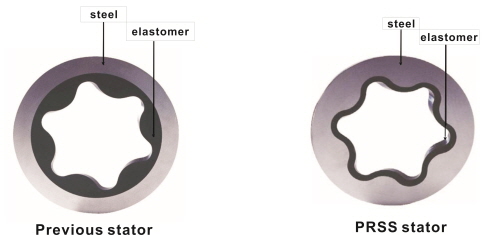
기존의 스테이터는 원형 실린더 형태의 강철관에 로브(lobe)형태로 제조된 고무(elastomer)를 부착하였다. 하지만 이러한 다량의 고무로 제조된 스테이터는 로토의 회전과 수압으로 인해 변형이 쉽게 일어나고, 로토의 회전마찰로 인해 발생하는 열을 쉽게 스테이터 외부로 방출하지 못하여 변형과 손상이 가속화 된다. 이러한 경우 공저이수모터의 효율이 급격히 낮아지며 장비의 고장이 발생한다(Malcore and Murray, 2010). 이러한 문제점을 해결하기 위해 여기서 사용된 PRSS의 동력공급섹션의 스테이터는 Fig. 10과 같이 강철관을 로브형태로 미리 제작하여 표면에 얇게 고무를 부착하여 제작하였다. 이로 인해 고무 부분의 변형과 파손을 줄이는 동시에, 발생하는 열을 빠르게 외부로 배출시켜 동력공급섹션의 효율을 증대시킬 수 있었다. 컨트롤 유닛과 방향제어 유닛(steering section(또는 바이어스 유닛(bias unit))은 기존의 push-the-bit 타입과 유사하다(Reich et al., 2003).
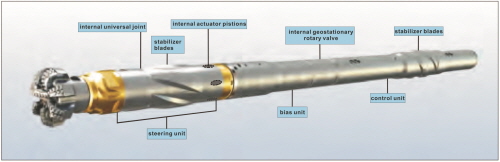
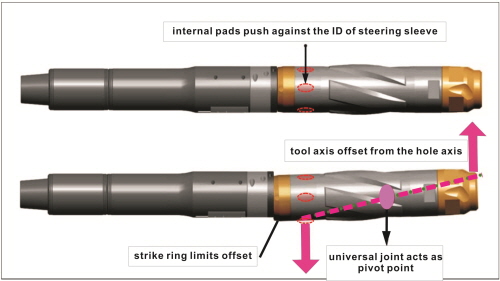
두 번째는 하이브리드 RSS 방식이다. 하이브리드 타입 RSS는 기존의 RSS인 push-the-bit과 point-the-bit를 혼합한 방식이다. 그러나 하이브리드 RSS는 단순히 push-the-bit 장비와 point-the-bit 장비를 합해 놓은 것이 아니다. 하이브리드 RSS는 기존의 두 RSS의 작동 메커니즘을 혼합해 새로운 개념의 장비로 만든 것이다. 하이브리드 RSS의 공저 장비는 Fig. 11과 같다. 기존의 push- the-bit 타입이 시추공벽을 밀면서 비트의 방향을 전환하기 위한 측력을 발휘한다면, 하이브리드 RSS는 방향제어유닛(steering unit)에 설치된 4개의 내부 작동 피스톤(internal actuator pistons)들이 방향제어 슬리브(steering sleeve) 내면을 밀어냄으로써 측력을 발휘하게 된다. 방향제어 슬리브는 유니버설 조인트(internal universal joint)를 축으로 삼아 비트축의 방향을 전환 시킨다 (Fig. 12). 이는 측력을 사용하여 방향전환을 하는 push-the-bit의 개념과 어느 하나의 축을 이용하여 시추비트를 원하는 궤도로 향하게 하는 point-the-bit의 개념을 혼합한 것이다. 시추칼라(drilling collar) 외부에 위치한 스태빌라이저 날(stabilizer blades)은 방향전환 시 시추공벽에 추가적인 측력을 가해서 더 급격한 방향전환이 이루어 질 수 있도록 도와준다(Hawkins et al., 2013).
이상과 같은 PRSS 방식과 하이브리드 RSS 방식의 특징 및 장점을 Table 1에 정리하였다. PRSS는 공저이수모터 또는 RSS를 단독으로 사용할 때 보다 굴진율을 상당히 높일 수 있다. 시추리그의 회전테이블 또는 탑드라이브에서 전달되는 회전력에 더하여 공저이수모터가 동시에 비트에 회전력을 전달하기 때문에 굴진율이 향상된다. 특히 강한 암석층을 시추하는 경우에는 PDC (poly-crystalline diamond compact) 비트를 사용하여 높은 굴진율을 발휘 할 수 있다. 기존의 RSS를 이용한 시추는 공저의 비트를 회전시키기 위해 시추파이프로 강한 회전력을 전달해야 했기 때문에 시추리그의 규모가 크고 탑드라이브의 용량 또한 상당히 커야 한다. 하지만 PRSS 기법은 추가적인 회전력을 공저이수모터로 부터 공급할 수 있기 때문에 리그의 용량이 작아도 사용이 가능하다. 또한 시추파이프를 통해 전달되는 회전력이 너무 높지 않기 때문에 시추파이프 진동으로 인한 장비손상을 줄일 수 있다.
한편, 하이브리드 RSS를 이용한 방향성시추의 장점은 방향전환 능력과 각도 증가율이 향상되었다는 점이다. 기존의 RSS 중 push-the-bit 타입의 RSS는 각도 증가율이 낮은 것에 비해 하이브리드 RSS는 최대 15°/100 ft까지 시현이 가능하다고 한다(Hawkins et al., 2013). 이와 같은 높은 각도 증가율 구현이 가능한 이유는 비트에 가해지는 측력이 내부와 외부 동시에 이루어지기 때문이다. 하이브리드 RSS는 주요 측력이 장비 내부에서 발휘되기 때문에 시추공벽의 상황에 의존되지 않을 뿐만 아니라 측력이 비트의 축에 직접 영향을 주기 때문에 방향전환 및 각도 증가가 원활하게 된다. 또한 point-the-bit과 달리 시추비트의 선정에 제한이 없다. 이 장비 역시 PRSS와 호환이 가능하다.
방향성 및 수평시추 시 고려사항
방향성 및 수평시추 시 고려해야 하는 사항에는 시추비용, 시추지역의 지질학적 특징, 시추 목표 및 궤도, 시추위치, 시추리그 및 시설 상태 등이 포함된다. 이 논문에서 소개된 방향성시추의 모든 기법들은 고려요소에 따라 현재까지도 여전히 사용되고 있다.
중대규모의 해상리그나 대규모의 육상리그를 사용하는 개발 사업에서는 RSS를 이용하는 것이 적합하다고 사료된다. 이러한 큰 규모의 사업들은 대게 자본력이 뒷받침 되는 경우가 많고 리그의 장비 저장 능력 및 사양이 좋기 때문에 다소 비용이 들더라도 RSS를 사용하여 생산효율을 높이는 것이 개발 경제성에 좋은 영향을 미칠 것이라 판단되기 때문이다. 하지만 리그의 사양이 낮거나 자본력이 뒷받침 되지 않는 소규모의 사업일 경우, 사용 비용이 다소 저렴한 공저이수모터를 이용한 방향성시추를 진행하는 것이 유리할 것으로 판단된다.
시추의 목표심도 및 궤도 또한 고려하여야 한다. 시추 목표심도가 깊지 않고 방향전환 및 각도증가 구간과 수평구간이 길지 않은 경우 공저이수모터를 사용할 것을 권장한다. 공저이수모터는 상대적으로 굴진율은 낮지만 시추구간이 짧을 경우에 사용비용이 적어 경제적일 수 있기 때문이다. 시추 목표심도가 깊고 수평구간의 길이가 긴 수평 장공시추의 경우에는 RSS를 이용한 시추를 적용하여 굴진율을 향상시킴이 더 경제적일 것이다.
최신 기법은 지질학적 특성을 고려하여 적용하여야 한다. 수평 장공시추의 경우 상대적으로 구간마다 지질학적 불확실성이 많이 존재한다. 지질학적 불확실성이 클 경우, 시추자가 실시간으로 급격한 방향전환을 할 수 있어야 한다. 이 경우, 하이브리드 RSS를 사용하는 것이 적합하다고 사료된다. 시추구간에 예기치 못하게 강한 암석층을 만나 굴진율이 저하되고 과도한 진동으로 인해 장비가 손상되는 경우가 있다. 이러한 경우, PRSS 방식을 적용하여 문제를 해결 할 수 있을것이라 판단된다.
결 론
이 연구에서는 방향성 및 수평시추에서 사용되는 방향제어 기술의 개념과 작동원리를 소개하고 장단점을 분석하였다. 또한 각 기법의 최적 적용환경을 살펴보았다. 그 결과 아래의 내용들을 발견할 수 있었다.
1.초기의 방향성 및 수평시추에서 방향제어는 전향쐐기 및 굴곡자 등을 사용하였다. 이러한 물리적인 방법들은 시추 굴진율이 낮아 총 시추 시간을 증가시켜 비경제적이었다. 이러한 단점을 보완하기 위하여 공저이수모터, RSS, PRSS 및 하이브리드 RSS 방식 등과 같은 다양한 기술개발이 이루어져 왔다.
2.공저이수모터를 이용한 방향성 및 수평시추는 높은 각도 증가율과 급격한 방향전환 능력을 가지고 있다. 하지만 방향전환 구간에서의 미끄럼시추는 시추암편의 제거가 원활하게 이루어지지 않게 하므로 굴진율을 저하시킨다. 또한, 공저이수모터의 덮개관은 다소 구부러져 있으므로 직선구간 시추 시 시추공의 모양을 원통형이 아닌 나선형으로 만들어 완결작업을 어렵게 하거나 물리검층시 물성측정을 어렵게 한다. 한편, 이 방식은 비용이 다소 적게 들기 때문에 소규모의 유전 개발 사업과 수평구간이 적은 시추궤도에 적합하다고 사료된다.
3.RSS를 이용한 방향성 및 수평시추 기법은 시추의 시작부터 방향전환 구간, 수평구간을 통틀어 시추파이프의 회전을 멈추지 않고 시추를 진행하는 방식으로 push-the-bit 타입과 point-the -bit 타입이 있다. 전자는 공벽에 측력을 가하여 시추 비트의 방향을 전환시키는 방식으로 방향전환 및 각도 증가율을 3°-6°/100 ft 이상 높일 수 없다는 한계성을 가지고 있다. 후자는 공저이수모터가 시추 비트의 방향을 전환하는 방식과 유사하며 사전에 어느 정도 기울어진 축이 원하는 방향으로 비트 방향을 고정시켜 시추를 진행하게 된다. (삭제) 결과적으로 RSS를 사용하는 방식은 시추파이프가 계속 회전하기 때문에 이수순환을 도와 시추암편의 잔재가 쌓이지 않고, 시추파이프의 회전력이 시추 비트에 계속 전달되어서 굴진율을 향상시킨다. 이 방식은 비교적 사용비용이 비싸기 때문에 자본력이 뒷받침되는 대규모 유전개발 사업에 적합하며, 높은 굴진율과 회전력으로 인해 수평 장공시추에 적합하다고 판단된다.
4.PRSS 및 하이브리드 RSS 방식은 기존 방향성 및 수평시추방식의 개념을 일부 혼합한 최신 기술이다. PRSS 방식은 push-the-bit 타입 상부에 공저이수모터를 장착하여 추가적인 회전력을 시추 비트에 전달하는 것이다. PRSS는 강한 암석층을 시추할 경우, 또는 과도한 시추파이프의 회전력 전달로 인해 장비손상이 일어날 경우에 사용하면 문제해결에 도움을 줄 수 있을 거라 판단된다. 하이브리드 RSS는 시추 장비 내부에 측력을 가하기 때문에 공벽에 상태에 영향을 받지 않아 방향전환 능력과 각도증가율이 높다. 하이브리드 RSS는 기존의 RSS 방식으로는 시추하지 못하는 시추궤도에 사용이 가능하며, 지질학적 불확실성이 높은 지층에서 사용할 경우 높은 효율을 나타낼 것이라 판단된다.
