

서 론
광산 자율운반시스템
자율운반시스템 개요
광산용 자율주행 트럭
글로벌 주요 제조사의 자율주행 광산 트럭
캐터필라(Caterpillar, 미국)
코마츠(Komatsu, 일본)
볼보(Volvo, 스웨덴)
샌드빅(Sandvik, 스웨덴)
자이프라(Zyfra, 러시아)
스카니아(Scania, 스웨덴)
히타치(Hitachi, 일본)
립헬(Liebherr, 독일)
토 의
기술적 측면
산업적 측면
지속가능성 측면
결 론
서 론
광업은 지질학적 불확실성, 밀폐된 작업 공간 등 광업 고유의 특성으로 인해 중대 재해 발생 위험도가 높은 수준을 유지한다(Kim and Kim, 2025). Fig. 1은 2018년부터 2024년까지 국내 광업 산업재해 현황을 나타낸 그래프로, 연도별 근로자 수, 재해자 수, 사망자 수, 그리고 재해율의 추세를 보여준다. 근로자 수는 11,697명에서 9,222명으로 7년간 약 21.2% 감소하였으며, 같은 기간 평균 재해율은 28.84%로 나타났다. 이는 전 산업 평균 재해율(0.61%)과 비교했을 때 매우 높은 수준이다(MOEL, 2025).

Fig. 1.
Trends in industrial accidents in the Korean mining industry from 2018 to 2024, showing the number of workers, casualties, fatalities, and the accident rate (MOEL, 2025).
이러한 높은 위험성과 노동력 감소 문제를 해결하기 위한 방안으로 광산 자율화가 주목받고 있다. 광산 자율화는 자동화 단계를 넘어, 시스템이 스스로 인식·판단·제어를 수행하는 고도화된 기술 체계를 의미한다. 그 핵심은 운송 수단(vehicle)의 자율주행 기술에 있으며, 최근 자율주행 트럭의 연구와 산업적 도입이 활발히 진행되고 있다. GlobeNewswire(2025)에 따르면 전 세계 노천광산에서 운행 중인 3,832대의 자율주행 트럭이 추적되고 있으며, 이 수치에는 자율주행 운행 중인 트럭뿐만 아니라 자율주행 준비가 완료된 차량도 포함된다.
광산용 자율주행 트럭에 관한 연구는 국내보다 해외에서 활발히 이루어지고 있으며, 원격조종(teleoperation)보다는 자율주행(autonomous driving) 중심으로 발전하고 있다. 주요 연구는 주행 경로 및 궤적 계획, 인지, 객체 탐지 등 자율주행 시스템의 핵심 기술을 중심으로 수행되어 왔다. 예를 들어, Li et al.(2024)은 여러 대의 자율주행 트럭이 동시에 안전하게 주행할 수 있도록 협력적 경로계획(Collaborative Trajectory Planning, CTP) 알고리즘을 개발하였다. Yang et al.(2023)은 노천광산의 하역 구역(dumping area)과 같은 비정형 환경에서의 실시간 협력 경로계획 방법을 제시하였으며, Tian et al.(2021)은 거친 지형 조건을 고려한 안전하고 실행 가능한 경로 계획 프레임워크를 제안하였다.
또한 Liu et al.(2025)은 노천광산 환경에서 운용되는 자율주행 트럭의 장애물 탐지 모델을 경량화하면서도 탐지 정확도를 유지하기 위한 연구를 수행하였다. Guo et al. (2025)는 가상환경에서 학습된 객체 탐지 모델을 실제 광산 환경에 적용할 때 발생하는 시뮬레이션과 현실 간 차이(Sim2Real domain shift)를 줄이는 방법을 제안하였다. Matsui et al.(2023)은 딥러닝 기반 강화학습(Deep Reinforcement Learning, DRL)을 활용하여, 자율주행 트럭 군집이 차량 간 상호작용을 스스로 학습하고, 트럭 수 변화에도 재훈련 없이 유연하게 적응할 수 있는 실시간 배차 알고리즘을 개발하였다.
이처럼 해외에서는 자율주행 트럭의 연구와 상용화가 빠르게 확산되고 있으나, 국내에서는 관련 기술 개발과 산업 적용이 여전히 제한적인 수준에 머물러 있다. 따라서 광산 자율화의 핵심 기술인 자율운반시스템(Autonomous Haulage System, AHS)에 대한 체계적 이해와 글로벌 산업 동향에 대한 종합적 분석이 필요하다. 본 연구의 목적은 광산용 자율운반시스템의 개념과 기술적 구성요소를 정립하고, 주요 글로벌 제조사를 중심으로 자율주행 트럭의 개발 현황과 산업 보급 동향을 비교·분석하는 것이다. 이를 통해 자율주행 트럭 기술의 발전 방향과 향후 지속 가능한 광산 자율화의 구현 가능성을 논의하고자 한다.
광산 자율운반시스템
자율운반시스템 개요
광산의 자율운반시스템은 광산 현장에서 트럭, 로더 등의 장비를 작업자가 직접 탑승하지 않고 원격으로 조작하거나 완전 자율주행으로 제어할 수 있는 시스템을 의미한다. 이는 작업장의 안전성을 높이고, 운송 효율을 향상시키며, 채광 비용을 절감하는 것을 목표로 한다. AHS는 스마트 마이닝 기술의 한 분야로, 광산 현장의 자율화와 무인 운반 부문을 중점적으로 다룬다(Long et al., 2024).
자율운반시스템의 주요 기능에는 (1) 원격 조작 및 자동화, (2) 실시간 모니터링과 데이터 분석, (3) 위험 예측 및 관리, (4) 자원 운송의 최적화가 포함된다. 이를 위해 자율주행 트럭, 자율 휠로더, 드론, 로봇 등 다양한 장비가 활용된다. 시스템은 채광 과정과 환경을 실시간으로 감시하고, 수집된 데이터를 분석하여 최적의 운반 및 작업 계획을 수립한다. 또한 인공지능(Artificial Intelligence, AI) 기반 분석을 통해 작업환경의 위험 요인을 사전에 예측하고, 사고를 방지하며, 채광 자원의 위치와 분포를 정밀하게 파악함으로써 효율적인 광석 운반을 가능하게 한다.
AHS는 센서 기술, 통신 및 제어 시스템, AI 및 기계학습 알고리즘과 같은 핵심 기술을 기반으로 구현된다. 먼저, 센서 기술은 작업자의 개입을 줄이고 주변 환경을 인식하기 위해 필수적이다. LiDAR(Light Detection and Ranging), 레이다, 초음파 센서는 광산의 3차원 환경 정보를 수집하는 데 사용되며, 카메라 센서는 작업 현장을 시각적으로 관찰하고 인식한다. Kim and Lee(2018)은 라인스캔 카메라 데이터를 활용하여 패턴 인식 기반 AGV(Automated Guided Vehicle)가 경로를 추종하도록 하는 자율주행 알고리즘을 제안하였다. Li et al.(2022)은 3D LiDAR 데이터를 활용해 객체를 탐지하는 방법을 연구하였으며, Azizi and Tarshizi(2016)는 LiDAR와 삼각측량법을 이용한 자율 제어 기법을 제시하였다.
둘째, 통신 및 제어 시스템은 자율운반시스템의 안정성과 정밀성을 확보하는 핵심 요소이다. 광범위한 작업 구역에서도 통신 지연과 음영 지역을 최소화하기 위한 중계 시스템이 필요하며, 장비 간 실시간 양방향 통신을 지원하는 무선 네트워크가 구축된다. Benlaajili et al.(2021)은 안정적인 무선 통신망과 접근 제어시스템의 중요성을 강조하였으며, Ishimoto and Hamada(2020)는 중앙 통신 의존도를 줄이고 시스템 자체의 안전성을 확보하는 분산형 제어 구조를 제안하였다.
셋째, 인공지능 및 기계학습 기술은 환경 인식, 객체 탐지, 장애물 회피 등 자율주행 트럭의 핵심 기능을 고도화한다. Guo et al.(2025)은 시뮬레이션 학습 모델을 실제 환경에 적용하기 위한 준지도 학습 기반 알고리즘을 제안하였으며, Lei et al.(2025)은 지하 LHD 트럭의 자율 적재 시 충돌 방지 알고리즘을 개발하였다. Li et al.(2024)은 트럭 간 그룹화와 우선순위 부여를 통해 궤적을 최적화하는 방안을 제시하였고, Matsui et al.(2023)은 심층 강화학습(Deep Reinforcement Learning, DRL)을 적용하여 자율주행 트럭의 실시간 배차를 최적화하였다. Ruan et al.(2022)은 도로의 균열이나 함몰 등 부정형 장애물을 실시간으로 탐지하는 알고리즘을 제시하였으며, Tian et al.(2021)과 Tang et al.(2019)은 비정형 지형 조건을 고려한 주행 궤적 및 주행 가능한 도로 탐지 기법을 연구하였다.
광산용 자율주행 트럭
광산용 자율주행 트럭(Autonomous Mining Truck)은 광석의 운반 작업을 수행하는 핵심 장비로, AHS의 주요 구성요소인 FMS(Fleet Management System)를 통해 통합적으로 제어된다. FMS는 차량의 위치 추적, 유지보수 관리, 연료 사용량 모니터링, 운행 패턴 분석 등을 수행하며, 이를 통해 운송 효율 향상, 작업 안전성 제고, 운영비 절감 등의 효과를 달성할 수 있다.
자율주행 트럭의 운행 방식은 자동화 수준에 따라 RC 제어(Remote Control), 원격조종(Teleoperation), 자율주행(Autonomous Driving)의 세 단계로 구분된다.
① RC 제어(Remote Control): 작업자가 장비에 직접 탑승하지 않고, 유·무선 통신 기술을 통해 안전한 거리에서 장비를 원격 조작하는 방식이다. 이 방식은 작업자의 직접 노출을 줄여 안전성을 확보할 수 있으나, 제한된 시야와 통신 지연으로 인한 제어 정밀도 저하, 장비당 전담 인력 필요 등의 한계가 있다. 따라서 단순하고 반복적인 작업에 주로 활용된다.
② 원격조종(Teleoperation): 제어실 내에서 카메라 및 센서 데이터를 이용해 작업 환경을 간접적으로 인식하고 장비를 조작하는 방식이다. RC 제어가 단순한 무선 신호 기반의 장비 조작에 초점을 둔다면, 원격조종은 실시간 영상과 센서 데이터를 활용해 보다 정교하고 복합적인 원격 운용이 가능하다는 점에서 차별된다. 한 명의 작업자가 여러 대의 장비를 동시에 제어할 수 있으며, 작업자가 위험 구역에 직접 진입하지 않아 안전성이 높다. 다만, 광범위한 무선 네트워크 인프라가 요구되며, 통신 불안정 지역에서는 제어 응답성이 저하될 수 있다.
③ 자율주행(Autonomous Driving): 장비가 센서와 인공지능을 통해 주변 환경을 인식하고, 운행 경로를 스스로 계획하여 주행·운반·적재 등의 작업을 수행하는 방식이다. 작업자 개입 수준에 따라 주행 보조(Drive Assist), 반자율(Semi-Autonomous), 완전 자율(Full Autonomous) 단계로 세분된다. 고속 통신, 센서 융합(Sensor Fusion), 정밀 제어 기술 등이 필수적으로 요구되며, 광산 산업의 완전 자율화를 실현할 핵심 기술로 평가된다.
Fig. 2는 자동화 수준에 따른 자율주행 트럭의 운행 단계를 나타내며, (a)는 RC 제어, (b)는 원격조종, (c)는 자율주행 단계를 보여준다(Epiroc, 2025; Caterpillar, 2025).
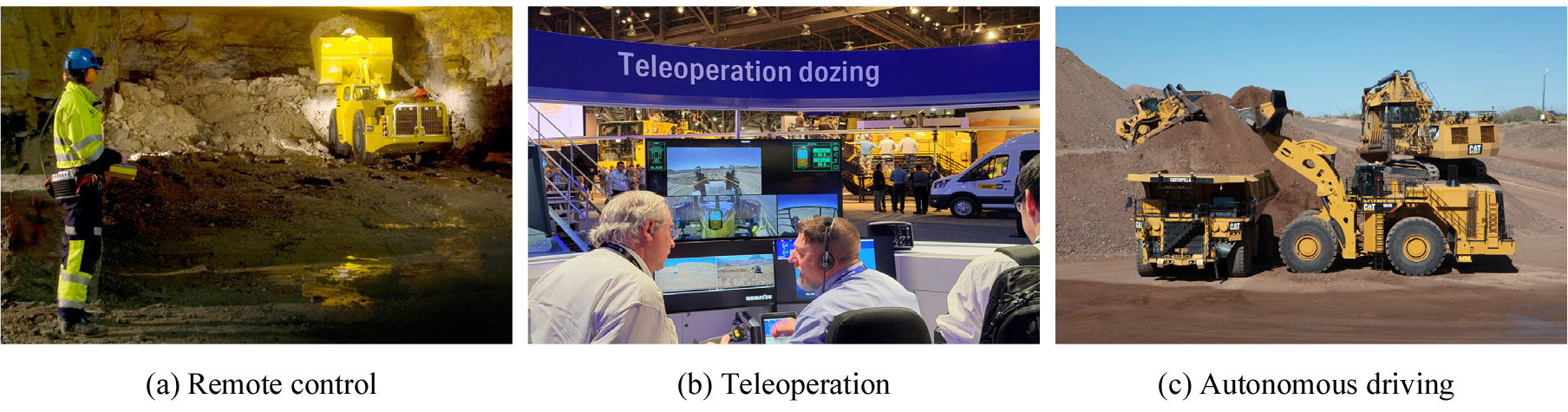
Fig. 2.
Operational levels of autonomous mining trucks according to the degree of automation: (a) Remote Control, (b) Teleoperation, and (c) Autonomous Driving (Epiroc, 2025; Caterpillar, 2022a).
글로벌 주요 제조사의 자율주행 광산 트럭
앞서 2장에서 살펴본 바와 같이, 자율운반시스템은 센서 기술, 통신 및 제어 시스템, 인공지능 알고리즘 등을 기반으로 구현되며, 그 핵심 구성요소인 자율주행 트럭은 자동화 수준에 따라 다양한 형태로 운용된다. 이러한 기술들은 현재 세계 주요 광산 장비 제조사들을 중심으로 상용화 단계에 진입하고 있으며, 각 기업은 고유의 시스템 아키텍처와 운용 전략을 통해 자율주행 트럭을 실제 광산 현장에 적용하고 있다.
본 장에서는 글로벌 주요 제조사별 자율주행 광산 트럭의 기술적 특징, 시스템 구성, 및 실제 광산 현장에서의 적용 사례를 비교·분석한다.
캐터필라(Caterpillar, 미국)
Cat® MineStar™는 광산 장비의 자동화와 자율화를 위한 통합 제어 시스템으로, 대표적으로 CAT 794 AC 자율주행 트럭 모델에 적용되고 있다. Cat® MineStar™ 시스템은 Detect, Command, Terrain, Fleet, Health 등 다섯 가지 주요 모듈로 구성되어 있으며, 각 모듈은 특정 기능을 담당한다.
그중 Fleet 모듈은 Fig. 3(a)와 같이 경로 최적화, 배차 간격 조정 등 광산 운송 전반의 효율적 운영을 지원한다. Command 모듈은 Fig. 3(b)에서 보이듯 LiDAR를 이용해 트럭 주변의 작업 구역을 감지하고, 장애물이 탐지될 경우 안전 조치를 취하기 전까지 다른 장비가 해당 구역에 진입하지 못하도록 제어한다. 또한 원격조종 및 완전 자율주행 운행을 모두 지원하며, 운행 데이터 분석을 통해 장비 효율을 향상시킨다(Caterpillar, 2022b).

Fig. 3.
Cat® MineStar™ system modules. (a) Fleet Management System for haulage optimization and scheduling (Caterpillar, 2020). (b) Command System utilizing LiDAR for real-time obstacle detection and autonomous truck control (Caterpillar, 2022b).
Caterpillar는 칠레의 Quebrada Blanca Phase 2(QB2) 프로젝트에서 Cat® MineStar™ 시스템으로 제어되는 CAT 794 AC 자율주행 트럭 28대를 투입하여 자율운반시스템을 구축하였다. 그 결과, 유인 트럭(manned truck) 대비 약 30%의 생산성 향상을 달성하였다. 또한 페루의 대규모 구리광산인 Quellaveco에서도 자율운반시스템을 성공적으로 도입하였다(Caterpillar, 2025). Fig. 4는 노천광산에서 운용 중인 CAT 794 AC 자율주행 트럭의 모습을 나타낸다.

Fig. 4.
Caterpillar’s CAT 794 AC autonomous haulage truck deployed in open-pit mining operations under the Cat® MineStar™ system (International Mining, 2019; International Mining, 2021).
코마츠(Komatsu, 일본)
Komatsu는 자율운반시스템인 FrontRunner AHS를 개발하여 상용화하였으며, 대표적인 자율주행 트럭 모델로는 830E, 930E, 980E 시리즈가 있다. FrontRunner AHS는 자동화 수준에 따라 High Automation, Full Automation, Artificial Automation의 세 단계로 구분되며(제조사 제시 용어), 센서 융합(Sensor Fusion) 및 통신 기술을 접목하여 자율주행 성능을 지속적으로 향상시키고 있다(Yureskes, 2020).
Komatsu의 자율주행 트럭은 LiDAR, 레이다, 카메라, GPS(Global Positioning System)/GNSS(Global Navigation Satellite System) 안테나 등 다양한 센서 모듈을 탑재하고 있으며, 이들의 조합을 통해 정밀한 위치 인식 및 안전한 주행 제어를 수행한다. 노천광산 환경에서는 불규칙한 지형과 작업 경로를 실시간으로 인식하기 위해 주행 경로 계획, 도로면 인식, 장애물 회피 알고리즘이 적용된다. 또한 GNSS 기반의 정밀 측위 시스템을 통해 차량 위치를 지속적으로 보정하며, 무선 통신 네트워크를 이용해 트럭과 중앙 제어 시스템 간의 실시간 데이터 송수신이 이루어진다(Yureskes, 2020).
Komatsu의 FrontRunner AHS는 2008년 칠레의 CODELCO Gabriela Mistral 구리광산에서 세계 최초로 상업 운용을 시작하였다. 이후 2016년에는 누적 운반량 10억 톤, 2017년에는 15억 톤을 달성하였으며, 2020년 기준으로 전 세계에서 350대 이상의 자율주행 트럭이 운용되고 있다. 특히 2024년 기준, Komatsu는 525대 이상의 트럭을 운영 중이며, 칠레의 Los Bronces 구리광산에는 62대의 930E 초대형 자율주행 트럭이 배치되어 있다.
볼보(Volvo, 스웨덴)
Volvo의 자율운반시스템인 Autona/Earth는 혹독한 작업환경에서도 일관된 성능, 높은 안전성, 그리고 신뢰성을 제공하도록 설계되었다(Volvo, 2025a). 대표적인 자율주행 트럭 모델로는 FMX와 FH 시리즈가 있다.
Volvo는 지하 광산 환경에서 운전자가 없는 완전 자율주행 트럭을 운용하고 있으며, 5G 기반 초고속 무선 통신망을 활용하여 장거리에서도 실시간 제어가 가능하다. 이 시스템은 주행 중 수집되는 데이터를 바탕으로 경로, 주행 사이클 타임(cycle time), 연료 소비량 등을 분석하여 최적의 운행 효율을 달성한다. Fig. 5는 Volvo의 완전 자동화된 자율운반시스템 구성을 나타낸다.

Volvo의 자율주행 트럭은 트럭 외곽부에 장착된 거리 감지 센서(distance sensors)를 통해 Fig. 6과 같이 실시간 장애물 회피 기능을 수행한다. 이 시스템은 갱도 벽이나 바위와 같은 정적(static) 장애물뿐만 아니라, 사람이나 다른 장비 등 동적(dynamic) 장애물도 탐지할 수 있다.

Volvo는 노르웨이의 브뢰노이 칼크(Brønnøy Kalk) 석회암 광산에서 FH-16 자율주행 트럭을 운영하고 있으며, 약 5 km 구간에서 석회암을 완전 자율주행으로 운반한다(Volvo, 2023a). 또한 스웨덴 볼리덴(Boliden) 광산에서는 자율주행 트럭을 도입하여 운용 중이며, 2035년까지 모든 운반 트럭을 자율주행형으로 전환할 계획을 수립하였다. 이와 함께 스웨덴 크리스티네베리(Kristineberg) 지하 광산에서는 깊이 약 1.3 km, 거리 7 km 구간을 자율주행하는 트럭을 실증 운용하였다(Volvo, 2016). Fig. 7은 실제 광산 현장에서 운행 중인 Volvo 자율주행 트럭의 모습을 보여준다.

Fig. 7.
Volvo’s autonomous haul truck operating in underground and open-pit mine sites (Volvo, 2023b).
샌드빅(Sandvik, 스웨덴)
Sandvik은 자율운반시스템 AutoMine®을 통해 다양한 광산 환경에서 자율주행 장비를 안전하고 효율적으로 운용하고 있다. 대표적인 자율주행 트럭 모델로는 TH545i가 있으며, 이 시스템은 장비 제어뿐만 아니라 광산 운영의 전반적인 최적화를 목표로 한다. AutoMine®은 장비의 이동 경로, 운반 사이클 타임(cycle time) 등 운용 데이터를 분석하여 작업 효율을 향상시키고, 에너지 소비를 최소화함으로써 생산성과 지속가능성을 동시에 추구한다. Fig. 8은 AutoMine®의 개요를 나타낸다.

Fig. 8.
Sandvik’s AutoMine® integrated automation system for autonomous mining equipment (Sandvik Mining, 2023a).
AutoMine®의 원격조종 시스템은 장비 주행과 제어에 필요한 다양한 정보를 작업자에게 실시간으로 제공함으로써 정밀한 운용을 가능하게 한다. 부분 자율화 기술을 적용하여 한 명의 작업자가 여러 대의 장비를 동시에 제어할 수 있으며, 이를 통해 생산성과 운용 효율을 크게 향상시킬 수 있다. Fig. 9는 AutoMine® 원격조종 시스템의 구성 예시를, Fig. 10은 3차원 환경 인식 및 내비게이션 시스템을 보여준다.
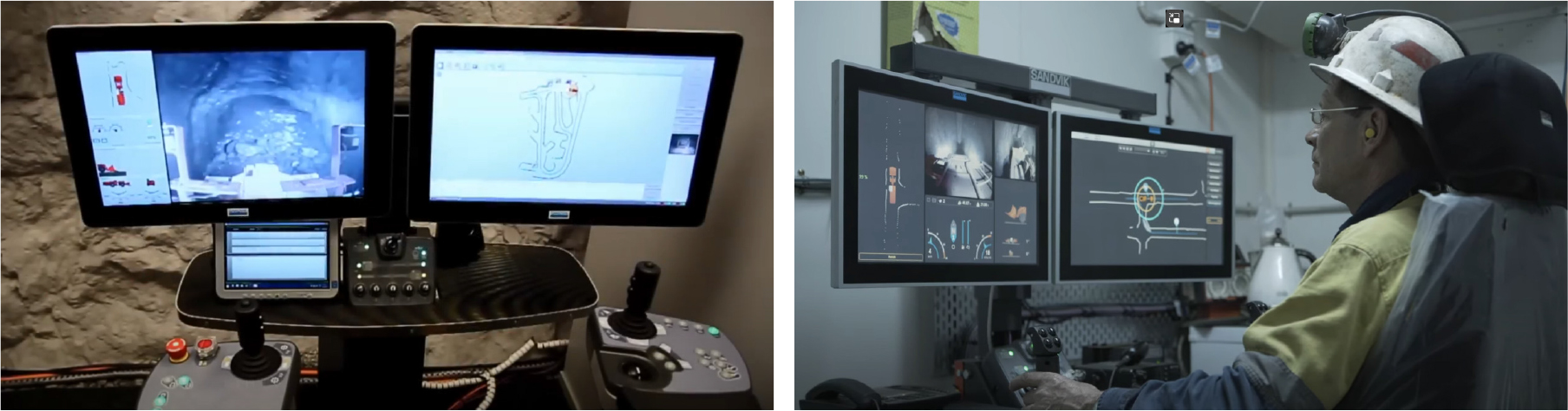

Fig. 10.
Sandvik’s 3D environmental perception and navigation system for autonomous mining equipment (Sandvik Mining, 2020).
국내 성신미네필드 석회석 광산에서는 AutoMine® 시스템이 탑재된 원격조종형 자율주행 트럭 TH545i 모델이 실제로 운영되고 있다. Fig. 11은 현장에서 운용 중인 TH545i 모델과 이를 원격으로 제어하는 작업자의 모습을 보여준다. 또한, 아프리카 말리의 Syama 금광산에서는 TH663i 모델이 적용되어 있으며, 현장의 안전성 제고와 자동화 기반의 생산성 향상, 그리고 수익성 증대를 목표로 하고 있다(Sandvik Mining, 2023a).

Fig. 11.
Remote-controlled autonomous haul trucks (TH545i) operated at the Seongshin Limestone Mine in Korea (Sandvik Mining, 2023b).
자이프라(Zyfra, 러시아)
Zyfra는 광산의 자율 및 원격 제어를 가능하게 하는 ZR RoboTruck 시스템을 개발하였다. 이 시스템은 90톤 및 130톤급 광산용 덤프트럭을 자율주행 형태로 개조하여 운용하며, 대표적인 모델은 BELAZ-7513R 자율주행 트럭이다. 주요 센서로는 레이다, LiDAR, 카메라, GPS 등이 사용되며, 이를 통해 수 킬로미터 떨어진 거리에서도 원격 제어가 가능하고, 자율주행 및 자체 위치 인식 기능을 구현한다. 시범 운영 결과, 총 500,000톤의 광석을 운반하며 시스템의 안정성과 효율성이 검증되었다. Fig. 12는 Zyfra ZR RoboTruck 시스템이 탑재된 BELAZ-7513R 자율주행 트럭을 나타낸다.

Fig. 12.
BELAZ-7513R autonomous haul truck equipped with the Zyfra ZR RoboTruck system (Onliner, 2018).
ZR RoboTruck 시스템은 Fig. 13에서 보이듯 장애물 인식 및 회피 기술을 활용하여 안전한 주행을 지원하며, Fig. 14의 로더 및 투하 지점 인식 기능을 통해 작업 효율을 극대화한다. 또한 5G 기반 고속 통신망을 적용하여, 광산 현장에서의 실시간 데이터 전송 및 장비 간 상호 운용성을 강화하고 있다.

Fig. 13.
Obstacle detection and avoidance technology of the Zyfra RoboTruck system (Zyfra Company, 2023).

Fig. 14.
Recognition of loading and dumping areas by autonomous haul trucks in the RoboTruck system (Zyfra Company, 2023).
Zyfra의 RoboTruck 시스템은 2019년 러시아 Khakassia 지역의 Chernogorsky 노천광산에 처음 상용 도입되었으며, 130톤급 BELAZ-7513R 트럭이 투입되었다. 이 시스템은 운영 효율성을 크게 향상시켜 생산성 21.9% 증가, 연료 소비량 13.2% 절감, 야간 운행 속도 7% 증가 등의 성과를 달성하였다. 또한 2017년에는 모로코 Ben Guerir 광산에 Terex MT3300 트럭을 개조하여 RoboTruck 시스템을 적용하였으며, 장거리 Wi-Fi 기반 통신 인프라를 구축하여 자율운반 기술의 적용 효과를 확장하였다. Fig. 15는 다양한 광산 현장에서 RoboTruck 시스템이 활용된 사례를 보여준다.
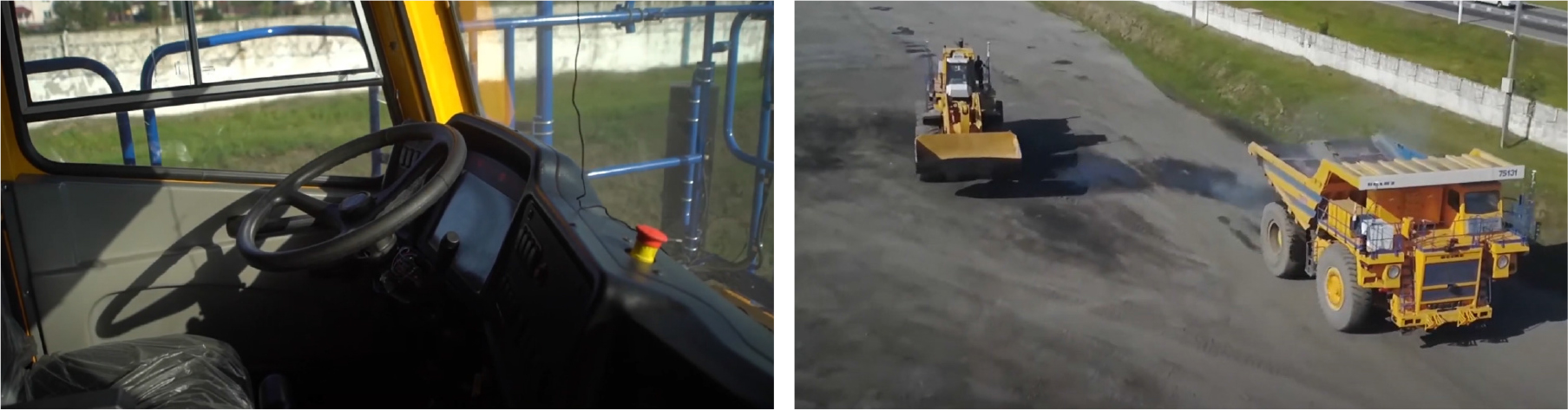
Fig. 15.
Field applications of autonomous haulage control using the Zyfra RoboTruck system (TechAcute, 2020).
스카니아(Scania, 스웨덴)
Scania는 자율운반 기술을 기반으로 한 광산용 자율주행 트럭 시스템을 개발하여, 24시간 연속 운행이 가능한 고효율 운송 솔루션을 제공하고 있다. 해당 시스템은 트럭의 성능을 실시간으로 모니터링하여 유지보수를 최적화하고, 운전자의 개입 없이도 안정적인 작업을 수행할 수 있도록 설계되었다. Fig. 16(a)는 Scania의 대표적인 자율주행 트럭 R450 모델을, Fig. 16(b)는 트럭의 운행 상태와 작업 데이터를 통합 관리하는 모니터링 시스템을 보여준다.

Fig. 16.
Scania’s AHS. (a) R450 autonomous haul truck (Trucksales, 2018). (b) Monitoring system (Scania Group, 2022a).
Scania의 자율주행 트럭은 GPS 및 고정밀 지도(HD map)를 기반으로 자체 측위 시스템을 구축하여 트럭의 위치를 실시간으로 추적할 수 있으며, 무선 통신망을 통해 중앙 제어 시스템과 연동된다. 이를 통해 작업 공정의 진행 상황을 모니터링하고, 운송 계획을 최적화할 수 있다. Fig. 17은 Scania 자율주행 트럭에 탑재된 주요 센서 구성을 나타낸다.

Fig. 17.
Environmental perception of sensors installed on Scania’s autonomous haul trucks (Scania Group, 2022a).
트럭은 카메라, LiDAR, 레이다 등의 복합 센서 시스템을 통해 주변 환경을 인식하며, 사전에 작성된 지도에 존재하지 않는 동적 객체가 탐지될 경우, 자체 안전 알고리즘이 작동하여 즉시 정차한다. 또한 교차로에서 다른 차량과 마주칠 때에는 자율 경로계획 알고리즘이 차량 간 우선순위를 판단하여 작업자의 개입 없이 이동 순서와 경로를 결정한다. Fig. 18은 이러한 경로계획 및 장애물 회피 기능을 나타낸다(Scania Group, 2024).

Fig. 18.
Path planning and obstacle avoidance functions of Scania’s autonomous haul trucks (Scania Group, 2022a).
2022년, 호주 Rio Tinto 광산에 Scania의 40톤급 자율주행 트럭이 도입되어 적재 및 운반 작업에 투입되었다. 해당 시스템은 현장 작업 효율을 크게 향상시켰으며, Scania는 2030년까지 자율운반 트럭의 운용 범위를 단계적으로 확대할 계획이다. 이와 같은 기술은 생산성 향상뿐만 아니라, 연료 절감과 배출 저감 등 지속 가능한 광산 운영을 실현하기 위한 기반이 되고 있다. 또한, Scania는 재생가능한 바이오 연료를 사용하는 완전 자율주행형 AXL 트럭을 공개하였으며, Rio Tinto 광산에서 실증 운용을 진행 중이다. Fig. 19는 Scania 자율주행 트럭의 현장 적용 사례를 제시한다.

히타치(Hitachi, 일본)
Hitachi는 노천광산용 AHS와 실시간 모니터링 기반의 장비 관리 시스템을 개발하여 자율주행 트럭의 효율적 제어와 운용을 지원하고 있다. AHS는 광물의 적재, 운반, 하역 경로를 세분화하고, 각 경로에 한 대의 트럭만 주행할 수 있도록 교통 제어 알고리즘을 적용하여 작업 충돌을 방지하고 운반 공정을 최적화한다. Fig. 20은 Hitachi의 대표적인 자율주행 트럭 EH5000AC와 그 운영시스템을 보여준다.
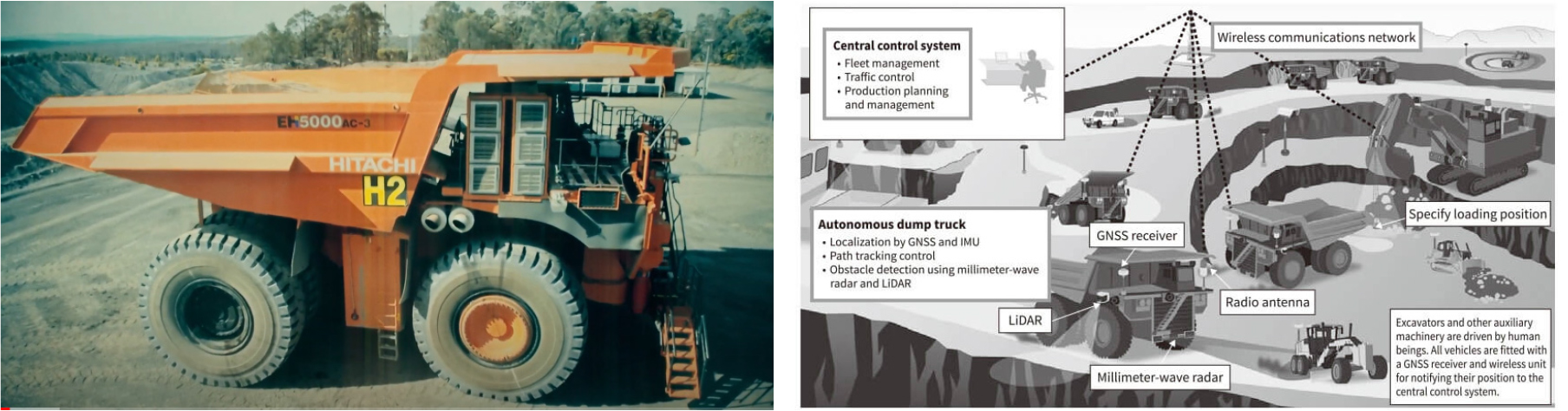
Hitachi의 자율운반 시스템은 광산 현장 및 트럭에 장착된 카메라를 통해 운행 상황과 작업 현황을 원격으로 모니터링한다. 또한 자율주행 트럭에는 충돌 방지 시스템과 경로계획 알고리즘이 탑재되어 있어, 교차로나 복잡한 작업 구역에서도 주변 장비를 인식하며 안전하게 주행할 수 있다. Fig. 21은 Hitachi 자율운반 트럭의 제어 시스템 구조와 객체 인식 범위를 나타낸다.

Fig. 21.
Control system and object detection range of Hitachi’s autonomous haul trucks (Hitachi Construction Machinery Channel, 2015).
대표 모델인 EH5000AC-3는 Advanced Vehicle Stabilization Control Technology를 적용하여 도로 상태에 따라 자동으로 조향과 속도를 제어함으로써 안정적인 주행을 실현한다. 또한 노천광산 운용에 필요한 GPS 기반 위치 추적 장치, LiDAR 센서, 자율 제어용 컨트롤러 등이 통합되어 있다. Fig. 22(a)는 Hitachi 자율주행 트럭에 탑재된 센서 구성, Fig. 22(b)는 중앙 모니터링 시스템을 보여준다. Hitachi는 호주 Whitehaven사의 Maules Creek 석탄광에서 2009년부터 AHS가 적용된 EH5000 트럭을 24시간 자율운반시스템으로 운용한 이후, 다양한 광산 현장으로 확대 적용하였다.

Fig. 22.
Hitachi’s AHS. (a) Sensors equipped on autonomous haul truck. (b) Monitoring system (Hitachi Construction Machinery Channel, 2015).
립헬(Liebherr, 독일)
Liebherr는 노천광산용 AHS를 개발하여 대표 모델인 T264 자율주행 트럭에 적용하였다. 최근에는 ioMine 시스템을 발표하며, AHS뿐만 아니라 기계 안내 시스템(Machine Guidance System), 운반 관리 시스템(Fleet Management System, FMS), 원격 서비스(Remote Service) 등으로 구성된 통합 자율운반 기술 플랫폼을 선보였다. ioMine 시스템은 Operate, Automate, Maintain의 세 가지 기술 영역을 중심으로 운행, 자동화, 유지보수 효율을 극대화하도록 설계되었다.
Liebherr의 AHS는 개방형 프로토콜 아키텍처(Open Protocol Architecture)를 기반으로 높은 호환성을 보유하며, 최대 적재하중 363톤 규모의 초대형 트럭에도 적용할 수 있다. Fig. 23은 Liebherr의 자율주행 운반 트럭을 보여준다.
호주 Fortescue Metals Group(FMG)의 Christmas Creek 광산에서는 Liebherr의 AHS가 탑재된 T264E 자율주행 트럭 4대를 투입하여 현장 검증을 수행 중이며, 이와 함께 맞춤형 FMS가 공동 개발되었다. Liebherr와 Fortescue는 장기 파트너십을 체결하여 향후 475대의 자율운반 트럭을 현장에 단계적으로 배치할 계획이다. 이 중 360대는 Fortescue Zero가 개발한 배터리 전력 시스템(Battery Electric System)을 탑재한 T264E 모델로, 탄소 배출을 최소화한 전동화 광산 운영을 목표로 한다(Liebherr, 2024).
T264E 전기 자율주행 트럭은 Fig. 24에 나타난 바와 같이, 6 MW급 고속 충전 시스템을 이용해 약 30분 이내에 완전 충전이 가능하다. 이 기술은 광산 작업 중 비가동 시간을 단축시키고, 운영 효율성과 지속가능성을 크게 향상시킨다. Fig. 25는 실제 광산 현장에서 운용 중인 Liebherr 자율주행 트럭의 모습을 보여준다.



토 의
본 장에서는 3장에서 정리한 제조사별 사례를 바탕으로 기술적, 산업적, 미래전략 및 지속가능성 관점에서 자율주행 트럭의 현황과 시사점을 종합적으로 논의한다.
기술적 측면
글로벌 주요 제조사들은 각기 다른 기술적 전략과 시스템 아키텍처를 통해 자율운반시스템 시장에 접근하고 있다. 자율주행 트럭들은 공통적으로 GPS, LiDAR, 카메라 등 복합 센서를 활용하여 경로 주행 및 장애물 회피 기능을 구현하고 있으며, 전반적으로 원격조종 단계에서 완전 자율주행 단계로 빠르게 전환되고 있다. Table 1은 주요 제조사의 시스템, 대표 모델, 및 핵심 기술적 특징을 요약한 것이다.
Table 1.
Systems, representative models, and key features by manufacturer
Caterpillar는 Fleet 및 Command 모듈을 중심으로 한 통합 제어시스템을 통해 광산 운영 전반의 효율화를 실현하였으며, Komatsu는 2008년 최초 상용화를 시작으로 업계에서 가장 많은 운용 대수와 운반 실적을 기록하고 있다. Volvo는 5G 기반 통신망을 활용하여 원격제어 및 실시간 데이터 수집 기능을 구현하였으며, 지하 광산 운용에 최적화된 기술을 보유하고 있다. Sandvik은 한 명의 작업자가 다수의 장비를 제어할 수 있는 원격조종 시스템에 강점을 가지며, Zyfra는 기존 트럭을 로봇화하는 형태로 자율 및 원격 운용이 가능한 솔루션을 제공한다. Scania는 차량 상태 모니터링 및 데이터 분석을 통해 운용 효율 및 지속가능성을 높이고 있으며, 바이오 연료 기반 자율주행 트럭을 통해 친환경 기술을 선도하고 있다. Hitachi는 교통 제어 알고리즘을 적용하여 각 경로에 한 대의 트럭만 주행하도록 설계함으로써 작업 충돌을 방지하고 공정 효율을 극대화하였다. Liebherr은 개방형 아키텍처 기반의 높은 시스템 호환성을 보유하며, Fortescue와의 협력을 통해 전동화 기반 초대형 자율주행 트럭의 대규모 보급을 추진하고 있다.
산업적 측면
Table 2는 각 제조사의 상용화 시점, 주요 성과, 협력 파트너십 및 적용 광산을 종합적으로 정리한 것이다. 자율주행 트럭의 산업적 보급은 초기 단계의 시험 운영을 넘어, 대형 노천광산과 지하 광산에서 생산성 향상·안전성 제고·연료 절감 등의 성과로 이어지고 있다.
Table 2.
Commercialization timeline, key achievements, and partners/introduced mines by manufacturer
Caterpillar는 칠레의 노천광산에서 유인 트럭 대비 약 30%의 생산성 향상을 달성하였고, Komatsu는 525대 이상의 자율주행 트럭을 운영하며 2017년 기준 연간 15억 톤의 운반 실적을 기록하였다. Volvo는 스웨덴 볼리덴 광산에서 깊이 1.3 km, 거리 7 km 구간의 완전 자율주행을 성공시켰으며, Sandvik은 한국 성신광산 및 말리 Syama 금광산 등 다양한 실제 광산에 시스템을 적용하였다. Zyfra는 러시아 Chernogorsky 광산에서 21.9% 생산성 향상과 13.2% 연료 절감을 달성하였으며, Scania는 Rio Tinto 광산에서의 실증 운용을 통해 지속 가능한 광산 운영 모델을 제시하였다. Hitachi는 호주 Maules Creek 석탄광에서 AHS 기반 24시간 자율운반시스템을 구축하여 안정적으로 운영 중이다. 마지막으로 Liebherr은 Fortescue와의 협력을 통해 475대 규모의 전기 자율주행 트럭을 단계적으로 도입할 계획이다. 이처럼 자율주행 트럭은 기존 유인 운반 장비 대비 생산성, 안전성, 연료 효율 측면에서 뚜렷한 경쟁우위를 보이며, 광산 운영의 무인화와 자동화를 가속화하고 있다.
이처럼 해외 광산에서는 자율주행 트럭 운반시스템의 생산성 향상과 안전성 제고 측면에서 높은 성과를 입증하며, 광산 무인화·자동화로의 도약을 실현하고 있다. 반면, 국내 광업계는 높은 재해율과 숙련 인력의 지속적인 감소로 인해 생산성과 안전성 모두가 저하되는 한계를 보인다. 이러한 현실을 고려할 때, 자율주행 트럭 운반시스템의 도입은 선택이 아닌 필수 과제로써 광산 운영의 지속가능성과 세계적 산업 경쟁력 확보를 위한 핵심 대안이 될 것이다.
지속가능성 측면
Table 3은 각 제조사의 미래 전략을 요약한 것이다. 전반적으로 모든 제조사들은 운용 효율의 극대화, 환경 영향의 최소화, 그리고 지속 가능한 광산 운영 실현을 주요 목표로 설정하고 있다.
Table 3.
Future strategies by manufacturer
Caterpillar는 주행 및 운용 데이터를 통합적으로 분석하여 장비 효율과 생산성을 최적화하는 지능형 통합 운영 시스템 구축을 추진하고 있다. Komatsu는 센서 및 통신 기술의 고도화를 통해 자율주행 성능을 향상시키고, 초대형 트럭의 대규모 추가 배치를 통해 시장 점유율을 강화할 계획이다. Volvo는 2035년까지 볼리덴 광산 내 모든 운반 트럭을 100% 자율주행화하는 것을 목표로 하고 있으며, Sandvik은 원격 제어 기반의 에너지 효율화 및 작업자 1인당 생산성 향상에 초점을 맞추고 있다. Zyfra는 기존 트럭을 로봇화하는 레트로핏 솔루션의 효과를 바탕으로 개조 시장 확대를 추진하며, Scania는 2030년까지 자율주행 트럭의 활용 범위를 확장하고 바이오 연료 기반 시스템으로 전환함으로써 환경 영향을 최소화하려 한다. Hitachi는 장비에서 수집되는 방대한 운행 데이터를 분석하여 광산 현장의 자율 운영을 최적화하는 데이터 기반 의사결정 시스템을 개발 중이며, Liebherr은 Fortescue와의 협력을 통해 475대의 전기 자율주행 트럭 배치 및 전동화 전환을 추진하고 있다. 이처럼 각 제조사는 단순한 자율운반 기술의 상용화를 넘어, 에너지 효율성·안전성·지속가능성을 중심으로 미래 광산의 자율화를 지향하고 있다. 특히 Scania의 바이오 연료 자율주행 트럭과 Liebherr–Fortescue의 전기 자율운반 시스템은 탄소중립 광산 실현의 중요한 전환점이 될 것으로 예상된다.
결 론
본 연구에서는 광산용 자율운반시스템의 개념을 정립하고, 글로벌 주요 제조사들의 자율주행 트럭 기술 및 산업 동향을 기술적, 산업적, 그리고 지속가능성 측면에서 비교·분석하였다. 총 8개 제조사(Caterpillar, Komatsu, Volvo, Sandvik, Zyfra, Scania, Hitachi, Liebherr)를 대상으로 시스템 구조, 기술적 특징, 상용화 성과, 그리고 미래 전략을 종합적으로 검토하였다.
자율주행 트럭 운반시스템은 LiDAR, GPS, 거리 측정 센서 등 첨단 센서 기술과 주행 경로·궤적 계획 알고리즘을 기반으로 발전하고 있으며, 운송 경로 최적화와 배차 효율화를 가능하게 하는 통합 제어시스템 형태로 진화하고 있다. 또한, 동적 장애물 회피 기술을 통해 작업자의 안전성을 강화하고, 주행 중 수집되는 데이터를 실시간으로 분석하여 운영 효율성 및 장비 유지보수 최적화를 달성하고 있다.
이러한 기술이 실제 광산에 적용된 결과, 자율주행 트럭은 기존 유인 트럭 대비 우수한 운용 성능을 입증하였다. 예를 들어, Caterpillar의 자율주행 트럭은 유인 트럭 대비 약 30%의 생산성 향상을 달성하였으며, Zyfra는 시범운용을 통해 21.9%의 생산성 증가와 13.2%의 연료 절감을 기록하였다. 각 제조사들은 2030년 또는 2035년까지 완전 자율주행 트럭으로의 전환을 목표로 한 중·장기 전략을 수립하고 있으며, 자율운반 기술을 지속 가능한 광산 운영을 위한 핵심 요소로 인식하고 있다.
결과적으로, 자율주행 트럭 운반시스템은 고위험 광산 작업환경에서의 안전성 향상, 생산성 증대, 에너지 효율화, 그리고 환경 영향 최소화를 실현할 수 있는 핵심 기술로 평가된다. 특히, 바이오 연료 및 전기 기반의 자율주행 트럭은 탄소중립적이고 지속 가능한 광산 운영을 위한 중요한 전환점이 될 것으로 전망된다. 또한, 자율주행 트럭과 드릴, 로더, 크러셔 등 광산 내 타 장비 간 통합 제어 및 협업 운용 기술, 그리고 AI 기반 의사결정 시스템의 고도화를 통해 완전 자율광산 구현이 가속화될 것으로 기대된다.
