

서 론
재생에너지 분야의 무인항공기 적용 사례
태양에너지
태양광 모듈 탐지 및 추출, 그리고 발열 검출
태양광 모듈의 검사 및 고장진단
태양광 발전 잠재량 예측을 위한 수치표면모델 구축 및 일사량 분석
풍력에너지
풍력 터빈의 인공 결함 조사 및 모니터링
풍력 터빈의 소음 패턴 모니터링
지열에너지
바이오에너지
소수력에너지
결 론
서 론
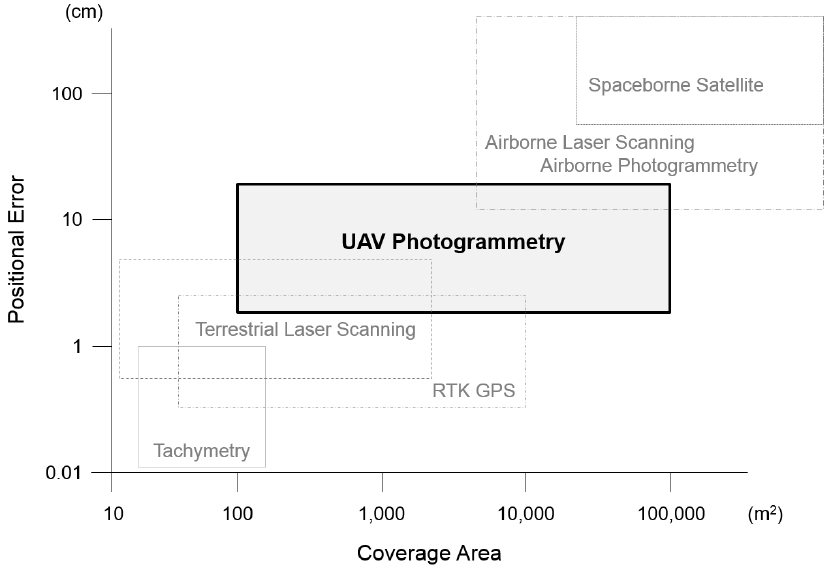
범지구적 기후변화 문제의 해결을 위한 온실가스 배출 저감, 지속적이고 안정적인 에너지 수급과 에너지 안보 문제, 고유가에 따른 대체 에너지와 자원의 필요성 확대 등으로 인하여 전 세계적으로 재생에너지(renewable energy)에 대한 관심이 증대되고 있다. 국내에서도 글로벌 기후 위기상황을 타개하고자 파리기후변화협약 이후 재생에너지 2030과 RE100과 같은 신·재생에너지 육성 및 보급 정책을 통해 지속가능하고, 경제적이며, 환경 친화적인 재생에너지 발전 신업을 추진하고 있다(Choi, 2013; Choi et al., 2019; Seo and Suh, 2020; Seo and Suh, 2021). 이러한 가운데 최근 안정적이고 효율적인 재생에너지 발전 사업 추진을 위해 무인항공기(unmanned aerial vehicle, UAV) 또는 드론(drone)이 다수 활용되고 있다. 4차 산업혁명의 요소 기술의 하나로 분류되는 무인항공기는 사용자가 원하는 시각과 주기로 관심지역을 자유롭게 비행하고 촬영함으로써 Fig. 1과 같이 3차원 지형 및 건물을 정밀하게 측량하거나 광역적 범위에 대한 오차가 작은 고해상도(공간적/시간적) 영상 자료를 확보할 수 있다는 장점이 있다(Lee and Choi, 2016; Suh and Choi, 2017). 이러한 이유로 무인항공기는 재생에너지 발전 현장의 여러 단계(조사 및 탐사. 개발 및 생산, 모니터링 등)에서 다양하게 활용되고 있다.
본 연구의 목적은 국내·외 재생에너지 발전 또는 개발 현장에서 무인항공기 기반 기술을 도입하여 활용하고 있는 사례들을 분석하는 것이다. 구글 스칼라(Google Scholar)에서 검색된 국내·외 전문학술지, 학술대회 발표 자료, 전문 서적 등을 활용 사례 조사 범위(대상)로 설정하였다. 그러나 단순한 사진 측량 또는 영상 촬영 목적에 해당하는 사례는 본 연구의 조사 대상에서 제외하였다. 조사된 문헌 자료들은 재생에너지원 별로 분류한 후, 무인항공기의 활용 목적이나 주제에 따라 세분류하였다.
재생에너지 분야의 무인항공기 적용 사례
재생에너지원 중에서는 태양자원, 풍력자원, 지열자원, 바이오매스자원, 소수력을 이용한 발전 분야에서 무인항공기가 다양한 목적으로 활용된 것으로 조사되었다,
태양에너지
재생에너지 중에서는 태양광 발전(photovoltaic) 분야에서 가장 다양한 무인항공기 적용 사례를 찾아볼 수 있었다. 열적외선 카메라(센서)가 탑재된 무인항공기를 이용하여 광역적 범위에서 태양광 모듈(solar module)을 탐지하고 추출하거나, 태양전지(solar cell)의 발열검출 및 고장 진단(fault detection or defect detection)에 활용되었다. 또한, 태양광발전시스템의 발전 잠재량을 예측하기 위한 3차원 고해상도 수치표면모델(digital surface model, DSM) 자료 생성 과정에 활용되었다. 그 외에도 태양광 발전소의 유지관리를 위한 모니터링 등의 다양한 작업에 무인항공기가 효과적으로 활용된 사례들이 다수 보고되었다.
태양광 모듈 탐지 및 추출, 그리고 발열 검출
전 세계적으로 태양광 발전소의 수와 규모는 해마다 증가하고 있다. 따라서 태양광 발전소를 주기적으로 검사하고 태양광 모듈의 이상을 효과적으로 식별하려면 자동화된 진단이 필수적이다. 이를 위해 열화상 센서가 장착된 무인항공기가 활용되는데 전체 모니터링 절차 중에 첫 단계는 영상에서 태양광 모듈을 탐지하고 추출하는 것이다. 이 때 가장 중요한 측정 요소는 발열 특성이라고 볼 수 있다.
Kim et al.(2016)은 무인항공기를 통해 획득한 열적외선 영상(thermal infrared images)으로부터 태양광 모듈의 면적을 자동으로 추출하는 알고리즘을 개발하였다. 이는 영상을 수동으로 분석하는 기존 방식이 갖는 단점을 극복하기 위함이었다. FLIR T620 열화상 카메라로 촬영한 영상에서 모듈의 경계는 명백한 선형 특징을 보이며, 모듈은 규칙적으로 배열된다. 따라서 수직 및 수평 필터링 알고리즘으로 선형 특징을 과장하고, 수정된 계층적 히스토그램 클러스터링 방법을 적용하여 모듈 경계를 추출하였다. 검증 결과 제안한 알고리즘의 평균 완전성(completeness)는 95.0%, 평균 정확도(accuracy) 96.9%, 평균 품질 92.1%의 높은 수치를 보였다.
Lee and Lee(2017)은 열적외선 센서가 부착된 무인항공기를 이용하여를 이용하여 태양전지의 발열 특성을 분석하였다. 일반적으로 태양전지의 발열 특성은 이상유무 진단에 사용되는 인자 중 하나이다. 다만 이 연구에서는 태양전지의 발열 특성 검출 가능 여부만을 조사하였기 때문에 본 세부 주제에 포함시켰다. 실험을 위해 일부 태양전지에 인공적으로 고무패치를 설치한 후, 열적외선 영상으로부터 발열이 생기는 고무패치의 위치를 분석하였다. eBee 모델에 thermoMap 카메라를 탑재하여 촬영을 수행하였으며, 획득된 열적외선 영상의 공간해상도는 10 cm, 최소 구분 가능 온도(temperature resolution)는 0.1°C 이다. 고무패치는 태양열에 의해 쉽게 가열되기 때문에 고무패치를 설치하지 않은 셀에 비해 고무패치를 설치한 셀에서 발열 현상이 크게 나타났다. 실제 고무패치 셀 비율과 드론 영상에서 검출된 셀 비율의 표준오차는 ±3.5%로 유사한 값을 보였다. 이를 통해 태양전지의 발열을 분석하는데 있어 무인항공기가 유용하게 활용될 수 있음을 제시하였다.
Diaz et al.(2020)은 무인항공기로 촬영한 열화상 자료로부터 복잡한 배경이 있는 환경에서 개별 태양광 모듈을 탐지할 수 있는 딥러닝 기법을 제시하고, 이를 고전적인 기법의 정확도와 비교분석하였다. 일반적으로 대비(contrast)가 낮거나 배경이 복잡한 영상의 경우 고전적인 표준 영상 처리 기술로는 처리가 쉽지 않다. 또한, 태양광 모듈과 유사한 전력선이나 구조물의 음영은 태양광 모듈의 자동 감지 정확도를 낮추는 요인으로 작용한다. 따라서 이 연구에서는 배경이 복잡한 환경에서 태양광 모듈을 식별하기 위해 훈련 영역 기반의 컨볼루션 신경망이 적용되었다. FLIR 社의 열화상 카메라가 탑재된 DJI Zenmuse XT 드론으로 3개 발전소 지역을 34~56 m 고도에서 촬영하였다. 세 가지 다른 전처리 작업을 거친 영상으로 훈련된 자료를 기반으로 감지된 모듈을 사용하여 감지되지 않은 모듈의 위치를 예측한다. 모듈의 영역과 회전 각도를 기반으로 감지된 모듈의 윤곽을 선택한 다음 윤곽의 외삽에 의해 새 모듈이 결정되는 방식이다(Fig. 2). 무인항공기 촬영을 통해 획득한 100개의 무작위 영상 내의 모듈에 개발된 기법을 적용한 결과 정밀도(precision) 0.996, 재현율(recall) 0.981로 매우 효과적인 성능을 나타내었다.
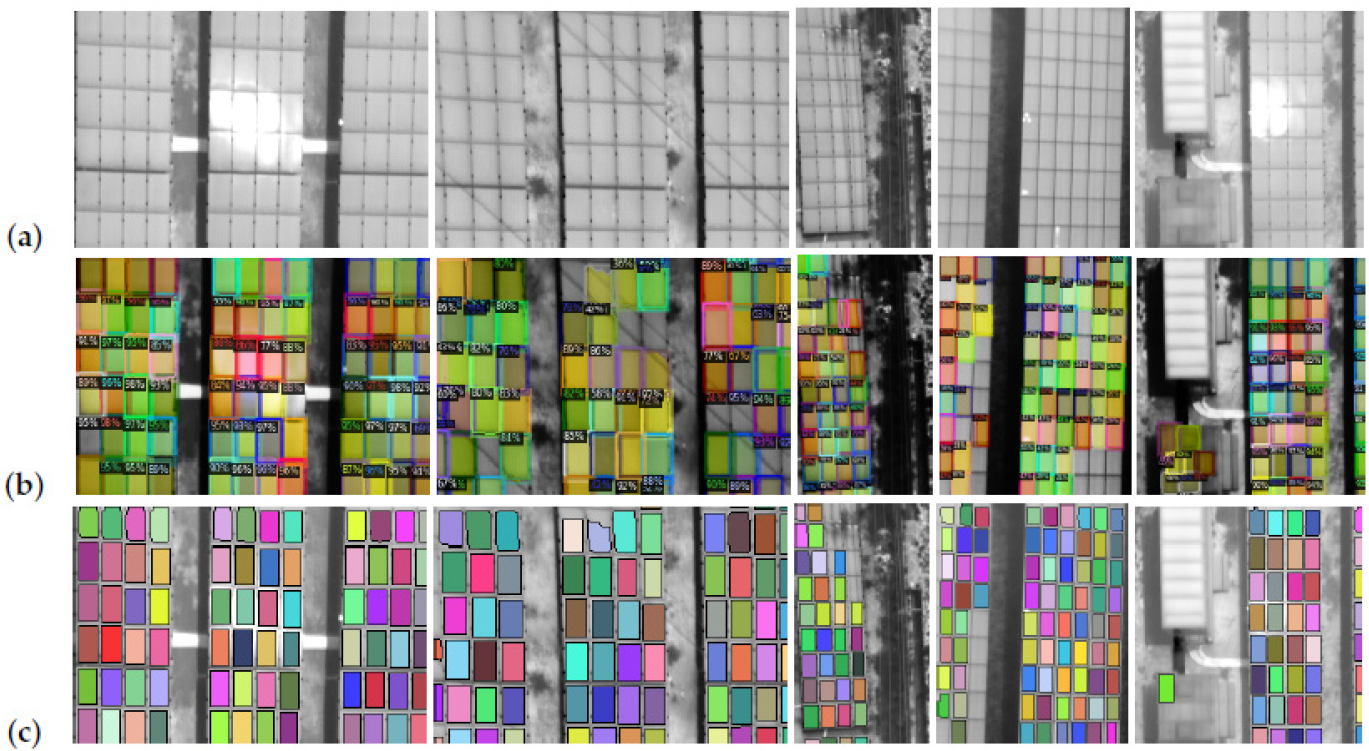
Fig. 2.
Detection of modules in thermal images using a deep learning method and a post-processing step (a) Thermal image in gray scale. (b) Panel detection with deep learning, (c) After post-processing (Díaz et al., 2020).
태양광 모듈의 검사 및 고장진단
태양광발전시스템은 다양한 요인에 의해 이상, 손상, 파손, 고장 등이 발생하며, 이는 발전 효율 저하와 유지보수 비용 증가로 이어진다. 따라서 이를 방지하기 위해서는 정기점인 점검과 모니터링이 중요하다. 촬영 시각과 장소 선택이 자유롭고 고해상도 영상 획득이 가능한 무인항공기는 일정 규모 이상의 태양광 발전소를 대상으로 효율적인 검사와 모니터링에 효과적이다. 이러한 장점 덕분에 다수의 연구자들이 무인항공기로 촬영한 광학 및 열적외선 영상의 육안 검사, 컴퓨터 비전 또는 영상 처리를 통해 태양광 모듈의 모니터링이나 고장진단 실험을 수행하였다. 이와 같은 연구들은 실제 운영 과정에서 발생하는 자연스러운 현상뿐만 아니라 인위적인 실험 환경 조성을 통해 다양한 고장 원인에 대한 고장진단 가능 여부를 검토하기도 하였다.
가장 기본적인 검사 및 고장진단 방법은 열적외선 영상에 나타난 태양광 모듈의 발열 특성을 이용하는 것이다. Lee and Lee(2016)은 무인항공기로 촬영한 열적외선 영상과 지리정보시스템(geographic information systems, GIS) 기반의 공간분석을 통해 태양광 모듈의 고장여부는 진단하는 실험을 수행하였다. 태양광 모듈의 고장여부를 진단하기 위해 고무덮개를 일부 모듈에 설치하였으며, 스위스 Sensefly에서 제작한 thermoMap 카메라를 eBee 모델에 탑재하여 촬영하였다. 영상의 공간해상도는 10 cm, 온도해상도는 0.1°C로 설정하였다. 촬영된 영상에 영역 별 평균값을 계산해주는 Zonal mean 함수를 적용하여 태양광 모듈들의 평균온도를 계산하였다. 고무덮개를 설치하지 않은 태양광 모듈은 33~35°C 분포를 보였으며, 고무덮개가 설치된 셀에서는 평균온도가 37°C 이상으로 이상 발열이 확인되었다. 즉, 태양광 모듈의 온도는 현장의 기상여건에도 영향을 받지만, 셀의 고장으로 생기는 이상발열의 경우에도 정상 모듈에 비해 상당히 높은 온도를 보이기 때문에 적절한 실험에 의해 기준값을 산출한다면 발열 특성으로부터 고장진단이 가능하다고 판단하였다.
광학 영상과 열적외선 영상의 육안분석뿐만 아니라 컴퓨터 비전이나 영상처리 기법을 적용한 연구들도 다수 발표되었다(Grimaccia et al., 2017; Liao and Lu, 2020, 2021). Lee and Park(2019)은 드론으로 촬영한 광학 및 열적외선 영상에 나타난 온도 변동 특성과 공간적 분포로부터 태양광 모듈의 정상 동작 여부를 식별하였다. Fig. 3에도 제시된 바와 같이 광학 영상에서도 태양광 모듈의 외관상 드러난 특징을 추출할 수 있지만, 열적외선 영상에서는 태양광 모듈의 온도 분포(발열 특성)로부터 정상 또는 비정상 상태를 명확하게 구분할 수 있었다. 위의 사례와 유사하게 비정상적인 태양광 모듈이 정상적인 그것들에 비해 더 큰 온도 변화를 나타내는 실험 결과를 제시하였다. Zefri et al.(2018)은 태양광 모듈의 다양한 결함 원인을 언급하고, 각각에 대한 드론 기반의 검사 및 고장진단 여부 판독 가능성을 분석하였다. 그 결과, 쏘일링(모듈 수광부를 덮은 퇴적물)은 대부분의 광학 영상에서 명확하게 확인되었고, 크랙(셀의 미세 균열)이나 얼룩 등은 지상 표본 거리(ground sample distance, GSD)가 2 mm 이하인 광학 영상에서 명확하게 탐지된 것으로 분석되었다. 반면에 열적외선 영상의 경우 낮은 해상도(80×60 cells, GSD 13.4 cm)로 인하여 태양광 모듈의 경계를 추출하거나 육안 분석을 적용하기에는 무리가 있었다. 그러한 이유로 해당 연구에서는 통계적 기법을 통해 양과 음의 다양한 이상값을 추출할 수 있는 핫스팟(hotspot) 기법을 영상처리 과정에 적용하였다. 이를 통해 태양광 모듈 내의 다양한 열적 특성과 이상값을 해석함으로써 태양광 모듈의 검사와 고장진단을 수행하였다. 핫스팟 기법이 적용된 연구는 Quater et al.(2014)에서도 찾아볼 수 있다. Li et al.(2017) 역시 광학 및 열적외선 영상의 가우시안(Gaussian) 필터링을 통해 스네일 트레일(snail trail; 모듈 표면에 달팽이가 기어간 듯한 자국)과 먼지에 의한 음영지역을 탐지 및 추출하고, 이를 전압-전류 측정 곡선(I-V measurement curve) 기법의 비교분석을 통해 검증하였다.
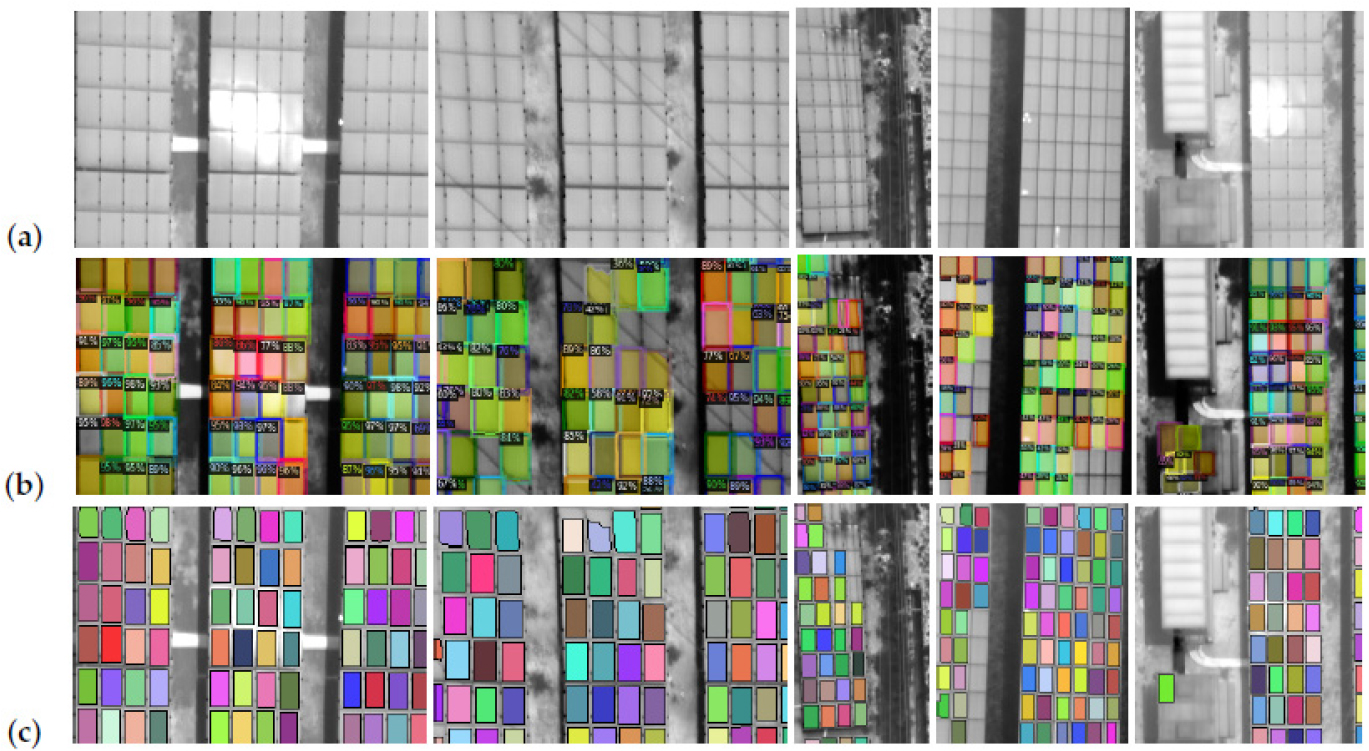
Fig. 3.
Optical and thermal infrared images of PV modules (a) Number of each module (C1‒C60) and RGB image. (b) Temperature distribution by module. (c) Comparison of three modules with different thermal distributions (Lee and Park, 2019).
한편 무인항공기를 이용한 태양광 모듈 검사시 드론의 열화상 카메라와 태양광 모듈의 각도에 따른 정확도 차이를 분석한 사례도 있었다(Kim et al., 2019). 실험 결과에 따르면, 태양광 모듈의 설치 각도가 0°일 때는 실제로 내포하고 있는 결함과 예측된 결함의 차이(오차)가 1% 미만으로, 각도가 10~30°일 때는 오차가 1%, 각도가 40~50°일 때는 오차가 2%, 각도가 60°일 때는 오차가 4%, 각도가 70°일 때는 오차가 6%, 각도가 80°일 때는 오차가 5%를 나타냈다. 물론 각도가 90°인 경우 정사영상(orthoimage)에서는 태양전지를 감지할 수 없었다. 물론 태양광 모듈은 수광효과를 극대화하기 위해 위치에 따라 최적 경사가 정해진다. 그러나 드론을 이용한 태양광 모듈 모니터링 시 이러한 오차를 염두에 두고 있어야 함을 강조하였다.
태양광 발전 잠재량 예측을 위한 수치표면모델 구축 및 일사량 분석
도심지의 태양광 발전 잠재량을 예측하기 위해서는 관심지역의 면적, 위치와 시간에 따른 일사량 값, 주변 지형과 건물에 의한 음영 여부 등을 고려해야 한다. 이 때, 도심지를 3차원으로 정밀하게 모델링하기 위해서는 고해상도 DSM 자료가 필수적이며, 이는 무인항공기 사진측량 기법(photogrammetry)으로부터 획득 가능하다. 사진측량(또는 입체 사진측량) 기법은 연속으로 중복 촬영된 2장 이상의 사진으로부터 높이를 측량하는 기법으로 기존에 위성영상을 이용한 원격탐사 분야에서 오랫동안 적용되어 왔다.
Lee and Lee(2018)은 태양광발전소 설계 단계에서 태양광 모듈의 위치와 방향을 결정하고, 월별 일사량과 발전소 면적에 따른 발전량을 예측하기 위하여 무인항공기를 활용하였다. DJI Matrice 600 회전익 드론에 Zenmuse X5 카메라를 탑재하여 전북 장수군 천천면 월곡리 주변지역을 촬영하였으며, 글로벌 항법위성시스템(global navigation satellite system, GNSS) 측량장비를 이용하여 복수의 지상기준점(ground control points, GCPs) 측량을 실시하여 정확도를 평가하였다. 총 132매의 광학 영상으로부터 5 cm의 공간해상도를 갖는 수치고도모델(digital elevation model, DEM) 자료를 생성하였다. 그 결과, 표고는 439~512 m의 분포를 보였으며, 전체 면적의 93.7% 영역이 남동부터 남서향의 방향각(112.5°~247.5°)을 보여 태양광발전소로부터 적합한 부지임을 확인하였다. 그리고 ArcGIS 소프트웨어의 Solar Radiation Tools을 이용하여 DEM 자료로부터 월별 일사량을 예측하였다. 시뮬레이션된 월별 일사량 값은 정확도가 높지 않지만, 발전소 지역의 월별 발전량 값이나 변화 등을 신속하게 예측할 수 있다는데 의의가 있음을 제시하였다.
Koc et al.(2020)은 태양광 설치가 필요한 가금류 사육장의 옥상 면적을 추정하기 위해 무인항공기로 획득한 항공영상을 이용하였다. 총 28,525 m2 영역을 대상으로 지상 69 m 높이에서 촬영한 6,836개의 광학영상으로부터 약 16억개의 포인트를 추출하고, 이로부터 지붕의 경계와 면적을 정확하게 측정할 수 있는 DSM 자료(공간해상도 3.86 cm)를 생성하였다(Fig. 4). 또한, 무인항공기 측량기법의 정확도를 평가하기 위해 건물 및 지붕의 길이와 면적을 수동으로도 측정하였다. 그 결과, 평균 측정 오차는 모든 평면치수에서 0,69%로 나타났다. 다만 건물의 길이와 너비를 측정함에 있어 무인항공기의 촬영 방향에 따른 오차는 일부 차이를 보이는 것으로 분석되었다.
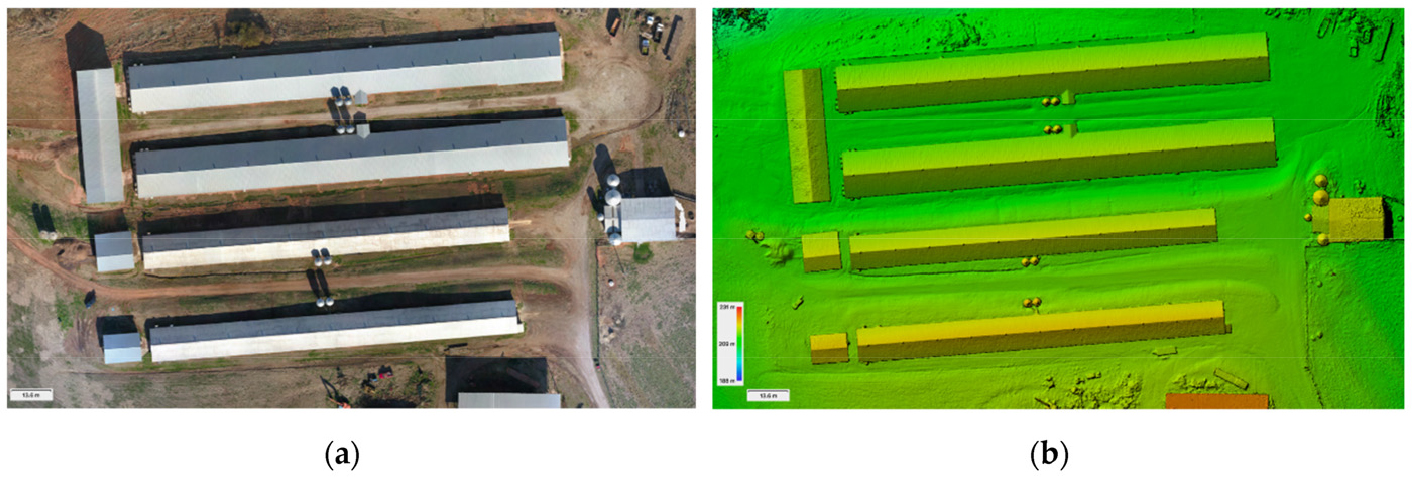
Fig. 4.
Drone-based (a) orthomosaic image and (b) DSM built from dense point cloud for estimating rooftop areas (Koc et al., 2020).
Moudrý et al.(2019)은 옥상 태양광 발전에 의한 에너지 생산량 평가에 있어 연간 일사량의 변동성과 옥상의 작은 구조물까지 모델링하는 DSM의 해상도에 대한 영향력을 비교분석하였다. 이를 위해, r.sun 모델을 채택하는 PVGIS (photovoltaic geographic information system) 소프트웨어에서 제공하는 저해상도 DSM 자료와 높은 정확도의 연간 일사량 자료를 결합한 모델 A와 무인항공기 사진측량을 통해 생성한 초고해상도(cm 단위)의 DSM 자료와 낮은 정확도의 연간 일사량 자료(ArcGIS 소프트웨어의 Area Solar Radiation 도구에서 추출된 결과)를 적용한 모델 B를 기반으로 각각 태양광 발전 잠재량을 계산하였다. 두 모델에 근거한 예측값을 실제 옥상에 설치된 태양광발전시스템의 발전량 실측 자료와 비교하였다. 그 결과, 연간 일사량 값의 차이에 따른 영향과 비교할 때 DSM 자료의 해상도에 의한 영향은 무시할 수 있는 수준으로 분석되었다. 따라서 옥상 공간의 태양광 발전 잠재량은 2~5 m 급의 DSM 자료로도 정확하게 예측이 가능하다고 제시하였다.
Han et al.(2019)은 무인항공기 사진측량 기법을 기반으로 건물을 3차원으로 모델링하고, 건물이 받는 일사량에 대한 도시지 건물 효과를 정량화하는 방법을 제시하였다. 다수의 건물과 키가 큰 낙엽수가 다수 분포하고 있는 중국 하얼빈(Harbin) 지역의 4.7 ha 영역에 대해 1시간 동안 5번의 드론 촬영이 수행되었다. 총 444개의 영상으로부터 도심지의 DSM을 생성하였으며, DSM에 위치 및 시간에 따른 일사량 값을 지도에 중첩하였다. 그 결과, DSM의 공간해상도 차이에 따른 9개 건물의 일사량 값의 차이를 효과적으로 제시되었다. 또한, 주변 환경(시설물, 나무 등)에 의한 그림자 효과 반영 여부에 따른 건물의 일사량 값의 차이를 명시적으로 확인할 수 있었다. 마지막으로 주요 지점에 대한 일사량 예측값과 실측값을 비교한 결과 결정계수(R2)가 0.991로 상당히 높은 유사성을 보였다.
풍력에너지
풍력에너지(wind energy) 분야에서는 터빈의 블레이드 및 로터 등의 외관상 결함을 가시적으로 감지하고, 세정 또는 왁싱 작업의 확인 등 유지보수 및 관리 분야의 모니터링이나 풍력 터빈의 음파와 소음 패턴을 보다 정확하게 측정하는데 무인항공기가 활용된 것으로 조사되었다.
풍력 터빈의 인공 결함 조사 및 모니터링
풍력 터빈의 모니터링을 위한 무인항공기의 안정적인 비행 및 영상 촬영에 대한 연구들이 발표되었다. Stokkeland et al.(2015)은 풍력 터빈 검사를 위한 무인항공기의 주행경로와 터빈의 객체 위치와 거리를 자동으로 인식하는 자율 머신 비전 모듈을 개발하였다. 개발된 시스템은 Hough 변환과 추적을 위한 칼만필터를 기반으로 무인항공기가 자율적으로 검사할 수 있도록 영상 촬영을 시작하기 전에 풍력 터빈 타워, 헙, 블레이드의 위치와 거리를 자동으로 인식한다. 현장 테스트 결과, 상당히 높은 정확도의 위치 및 거리 인식율을 선보였으며, 무인항공기의 단일 보드 컴퓨터에서 실시간으로 실행할 수 있음을 확인할 수 있었다. Schӓfer et al.(2016)은 무인항공기를 이용하여 풍력 터빈을 자동으로 검사할 수 있는 프로토타입의 동적 모델을 제안하였다. 이 모델은 풍력 발전 지역의 초기 비행을 통한 사전 3차원 전자지도 작성, 스플라인(spline) 기반의 비행경로 계획, 그리고 2차원 라이다(Light detection and ranging, LiDAR) 센서 기반의 거리 제어를 통한 충돌 방지 기능을 포함하고 있다. 실내 테스트 수행 결과, 무인항공기는 충돌 없이 비행을 잘 수행한 것으로 보고되었다.
앞의 연구들이 풍력 터빈 검사를 위한 무인항공기의 비행 계획 또는 최적화라고 한다면, Galleguillos et al.(2015)은 열적외선 카메라 장착형 무인항공기를 이용한 비파괴 방식으로 풍력 터빈 블레이드의 다양한 겸함(손상, 파손, 박리 등)을 검사하였다. 적절하고 일관된 공간해상도를 갖는 영상을 확보하기 위해 비행경로는 블레이드로부터 5 m 거리를 유지하고, 비행속도는 1 m/s로 설정하였다. 그 결과, Fig. 5와 같이 블레이드에서 박리와 크랙 등의 인공 경함을 발견할 수 있었다. 블레이드 검사에 수행된 시간은 약 18분이었다. 무인항공기를 이용한 풍력 터빈 모니터링 기술은 시간과 비용 측면에서 상당히 효과적이었고, 유지보수를 위한 의사결정에 객관적인 자료를 제공할 수 있었다. 블레이드의 결함을 식별하는 방법으로 수동 육안 검사가 적용된 점은 한계점으로 인식되었고, 이를 통해 향후에는 다양한 사례와 머신러닝 기법을 결합한 데이터 기반의 분석 기법이 필요함을 제시하였다.
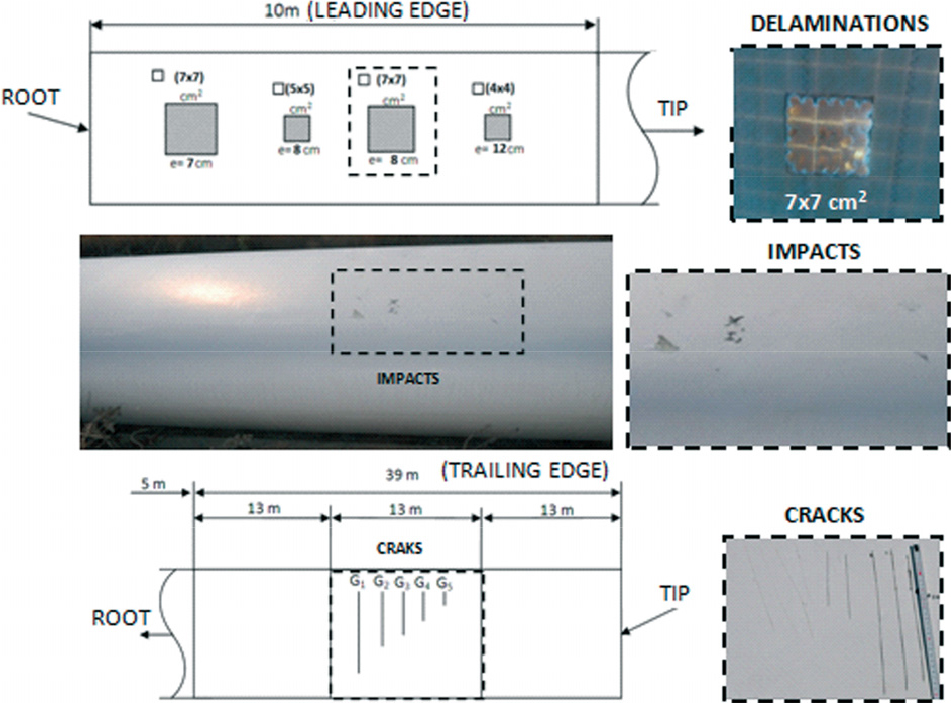
Fig. 5.
Schematic representation and views of artificial defects introduced into blade (a) Delaminations. (b) Impacts. (c) Cracks (Galleguillos et al., 2015).
풍력 터빈의 소음 패턴 모니터링
Sánchez et al.(2021)은 무인항공기와 음향 주파수 영역 분석(sound frequency domain analysis)을 이용하여 풍력 터빈 소음 패턴 모니터링에 대한 새로운 접근 방식을 제시하였다. 풍력 발전 분야에서 터빈이나 나셀과 같은 기계와 재료 측면에서는 상당한 발전이 이루어졌으나 유지관리 및 장애 감지 분야에서는 상대적으로 기술 발전 속도가 느린 실정이다. 해당 연구에서는 무인항공기에 음향 센서를 탑재하고, 주파수 영역에서 개발된 심층 음향 분석 기법을 적용하여 현장에서 테스트를 수행하였다(터빈과 드론 거리는 약 20 m). 신호 처리를 통해 얻은 주파수별 결과로부터 주파수 영역 분석에서 풍력 터빈의 결함을 감지함으로써 유지관리에 기초 자료를 제공할 수 있었다.
지열에너지
지열에너지(geothermal energy)의 경우, 광학 및 열적외선 센서 탑재형 무인항공기를 이용하여 섬 또는 화산 지역 등의 열적외선 영상을 획득하고, 이로부터 지표의 열적 특성과 이상대(anomaly)를 분석함으로써 관심지역의 지열 부존 잠재량을 평가하기 위한 기반 연구들이 다양한 국가에서 발표되었다. 물론 무인항공기가 민간에서 보편적으로 활용되기 전에도 광역적 범위(regional scale)에 대해서는 인공위성 영상 분석을 통해 이러한 원격탐사가 이루어져 왔다. 그러나 인공위성과는 달리 무인항공기는 관심지역에 대해 사용자가 원하는 공간해상도(spatial resolution)와 시간해상도(temporal resolution)를 갖춘 자료를 제공할 수 있게 되면서 지역적 범위(local scale)에서는 무인항공기가 더 높은 적용성과 활용도를 보이고 있는 실정이다.
Nishar et al.(2016)은 뉴질랜드 Wairakei-Tauhara 지열 지대에 대한 무인항공기 사진측량과 함께 열적외선 영상 촬영을 통해 지표와 인근 식생에 대한 열적 특성을 평가하고, 열적 이상대를 추출하였다. 무인항공기는 Blade 350 QX2 Quadcopter 회전익 모델을, 광학카메라는 Sony HDR-AS100V를, 열화상카메라는 FLIR Tau 320 모델이 사용되었다. 연구대상지역 중 700 m2 영역에 대하여 광학영상(1.8 cm 해상도)과 열영상(0.5 cm 해상도)을 각각 촬영하였으며, 무인항공기에 내장된 위성측지시스템(global positioning system, GPS)으로부터 영상에 기록된 좌표를 이용하여 두 영상을 병합하였다. 그 결과, 연구지역의 지표온도는 약 30~90°C의 분포를 보이는 것으로 나타났다. 특히, 북서부 나지에서 약 90°C에 이르는 열적 이상대를 탐지할 수 있었는데 이는 지반이 증기로 가열되어 나타나는 현상인 것으로 평가되었다.
Chio and Lin(2017)은 무인항공기와 XM6 열적외선 카메라를 이용하여 대만 샤오유켕 화산지역(Hsiaoyukeng)을 모니터링 하였다. AI-RIDER YJ-1000-QC quadcopter 회전익 무인항공기에 640×480의 픽셀수를 갖는 XM6 열적외선 카메라를 부착하여 68,000 m2 영역을 촬영하였다. 이를 통해, Fig. 6과 같이 15 cm × 15 cm의 격자셀 크기를 갖는 광학 영상과 열적외선 정사영상을 추출하였다. 추출된 영상의 위치 정확도를 평가하기 위해 동일 지역에 촬영된 LiDAR 자료와 비교해본 결과, 오차는 평균 1.78 m로 나타났다. 이 수준의 오차는 화산지역의 모니터링을 수행하는데 문제가 되지 않는 것으로 평가하였다.
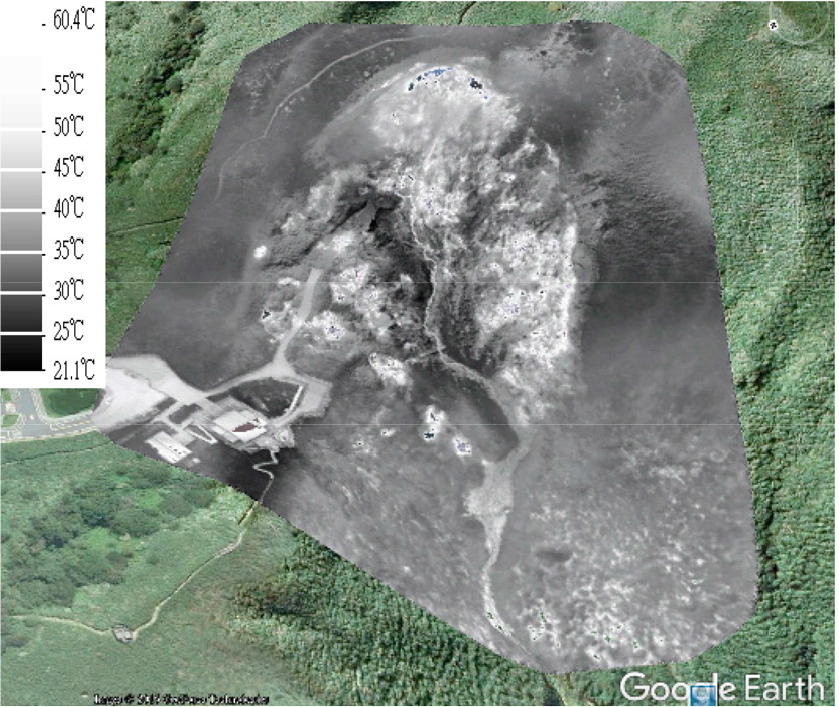
Fig. 6.
Schematic representation and views of artificial defects introduced into blade (a) Delaminations. (b) Impacts. (c) Cracks (Galleguillos et al., 2015).
Cherkasov et al.(2018)은 체첸 공화국의 칸카라 지열 지대(Khankala geothermal field)와 지열 발전소 모니터링을 위하여 무인항공기 기반의 열적외선 영상을 촬영 및 분석하였다. 무인항공기 장비로는 Sony DSX-RX1 광학 센서와 Thermoframe-MX-TTX 열적외선 센서를 Geoscan 201 드론 모델에 부착하여 사용하였다. 다수의 정합된 열 영상으로부터 화재, 난방 시설 등 다양한 시설의 모양과 열적 특성을 기반으로 13개의 열적 이상대를 추출하였다. 특히, 지열발전소에서 지열수를 주입할 때와 발전 후 지열수의 온도가 낮아졌을 때의 열적외선 영상을 모두 촬영하고 비교 분석을 수행하였다. 그 외에도 연구대상지역에서 지표 온도가 높은 지점을 현장 방문 조사하여 다양한 원인을 분석하였다(예: 온수 배출, 온실 난방. 화재 지역, 우물 등)
Bjornsson et al.(2019)은 DJI 社의 Matrice 210 드론을 이용하여 아이슬란드 4개 지역을 대상으로 광학 영상과 열 영상(30 cm 공간해상도)을 주기적으로 획득하고, 이로부터 지표면의 현상을 분석한 후 원인을 밝힐 수 있는 지열원과 지질구조를 해석하였다. 스바르센기(Svartsengi) 지역의 경우, 지표 온도가 높게 나타난 지역은 N-S 주향을 갖는 수백미터 길이의 지질구조와 연관되는 것으로 추론하였다. 남부 헤이마에이(Heimaey) 섬에서 발생된 1973년의 Eldfell 분화가 여전히 표면에 열을 방출하고 있으며, 이는 45년 전에 퇴적된 현무암 용암 더미가 아직도 완전히 굳지 않았음을 시사하는 것이라 밝혔다. 또한, 남서부의 중앙구조대에 있는 간헐천인 게이시르(Geysir) 역시 열영상에서 고온의 특징을 잘 보여주고 있는 것으로 나타났다. 마지막으로 빙하로 덮인 성층화산인 스나이펠스요쿨(Snæfellsjkull)의 동쪽 부분은 높은 고도에서 성장하는 식물과 온화하게 따뜻한 지반 온도에 근거할 때 지금도 숨겨져 있는 지열 저장고인 것으로 판단하였다.
Carbajal-Martínez et al.(2021)은 멕시코 라호야 해변(La Jolla beach)의 열 영상으로부터 높은 지표 온도 특성의 원인을 규명하고, 해안가 지열 자원에 의한 출열량(heat output)을 예측하였다. 열화상 카메라가 부착된 무인항공기로 열영상(해상도: 2018년 10.28 cm, 2019년 7.38 cm)을 촬영한 결과, 라호야 해변은 지표온도가 최대 52°C, 20 cm 깊이에서의 온도가 최대 93°C로 나타날 정도로 높은 지열 자원이 부존하는 것으로 추정되었다. 기본적으로 라호야 해변의 높은 지표 온도는 지표와 맞닿아 있는 심부 지열원에 기인한다. 다만 다른 두 날짜에 촬영된 열적외선 영상에서 약 50°C에 이르는 높은 지표 온도 영역이 2019년의 경우 2018년보다 3배 이상 큰 것으로 나타났는데(259 m2 vs. 68 m2), 이는 조석 범위와 정수압 변화 때문인 것으로 분석되었다. 즉, 해수면의 증가는 해변과 해안 대수층 사이의 경계에서 정수압 증가를 유발하고, 정수압의 변화는 해안가 지열 이상대의 위치나 모양을 변화시키게 된 것이다.
바이오에너지
바이오에너지(bio energy) 분야에서는 바이오매스 등 연료가 되는 농작물 또는 목질 등의 식생지수(normalized difference vegetation index, NDVI), 생육상태(키, 색상, 직경 등), 분포와 범위를 빠르고 정밀하게 측정하고, 이를 주기적으로 모니터링 하는데 무인항공기 측량 및 모니터링 기술이 적용되었다.
Lopatin and Lopatina(2017)은 무인항공기를 이용하여 핀란드 리페리 시(Liperi municipality)에 위치한 바이오매스(갈대, 나무)의 공간적 분포와 크기를 추정하고, 영상처리 기술로 바이오매스의 유형을 분류하여 재생에너지원으로써의 바이오에너지의 잠재량을 평가하였다. 무인항공기로는 CropCam UAV system(Micropilot, Stony Mountain, Manitoba, Canada)이, 광학 카메라는 Canon IXUS 960 모델이 사용되었다. 드론 비행을 통해 6.8 ha 면적에 대한 173장의 영상이 촬영되었고, 영상의 격자셀 크기는 2 cm로 설정되었다. 먼저 연구대상지역의 중첩 영상에 객체 지향 이미지 처리를 적용하여 갈대와 나무를 탐지하고, 각 객체를 하나씩 분리하였다. 다음으로 각 지점의 높이 값을 보여주는 포인트 클라우드(point cloud) 자료를 획득하였다. 이로부터 각각의 갈대와 나무의 부피를 추정하였다. 그 결과, 갈대는 55,643개가 탐지되었고 8,908 m2 면적에서 5,098 m3 부피를 갖는 것으로 분석되었다. 나무는 173개가 매핑되었으며, 높이와 밀도를 고려할 때 총 중량은 37,112 kg 으로 계산되었다. 개별 객체의 높이값에 대한 오차는 0.044 m, 부피값에 대한 오차는 0.096 m3로 계산되어 잠재량 평가에 있어서는 충분히 허용될 수 있는 수준으로 사료되었다. 또한, 바이오매스 잠재량 평가를 위해 드론 준비, 비행, 자료 처리, 분석, 가시화까지 단 7시간 23분이 소요되었다. 바이오매스 잠재량 평가의 정확도와 소요 시간을 모두 고려했을 때 무인항공기의 적용성은 상당히 높음을 제시하였다.
앞의 연구와 유사하게 Peňa et al.(2018)도 무인항공기와 영상처리 기술을 결합하여 바이오매스 자원으로서의 포플러 나무의 양을 추정하였다. 포플러 나무는 리그노셀룰로오스(lignocellulose) 생산 잠재력이 가장 큰 산림 작물의 하나로 포플러 농장의 생산성을 추정하는데 필수적인 요소이다. 드론은 MD4-1000(microdrones GmbH, Siegen, Germany) 모델이, 광학 카메라는 Olympus PEN E-PM1, 다분광(multi-spectral) 카메라는 Tetracam mini-MCA-6 (Tetracam Inc., Chatsworth, CA, USA)이 사용되었다. 관측 대상은 95 × 60 m2 영역에서 자라고 있는 3,350여개의 1년 된 포플러 나무로 다중 Fig. 7과 같이 영상으로부터 생성한 연구대상지역의 DSM 자료를 토대로 나무의 직경(4.15 m)과 높이(4.3 m)의 평균값을 계산하였고, 다분광 센서 자료로부터 포플러 나무의 NDVI 값을 추출하여 수분을 적게 함유하여 자체 연소가 가능한 바이오매스(dry biomass)의 양을 예측하였다. 다만, DSM 자료에서 일부 포플러 나무 꼭대기의 좁은 꼭지점을 감지하지 못해 부피를 과소 추정하는 문제가 발견되기도 하였다.
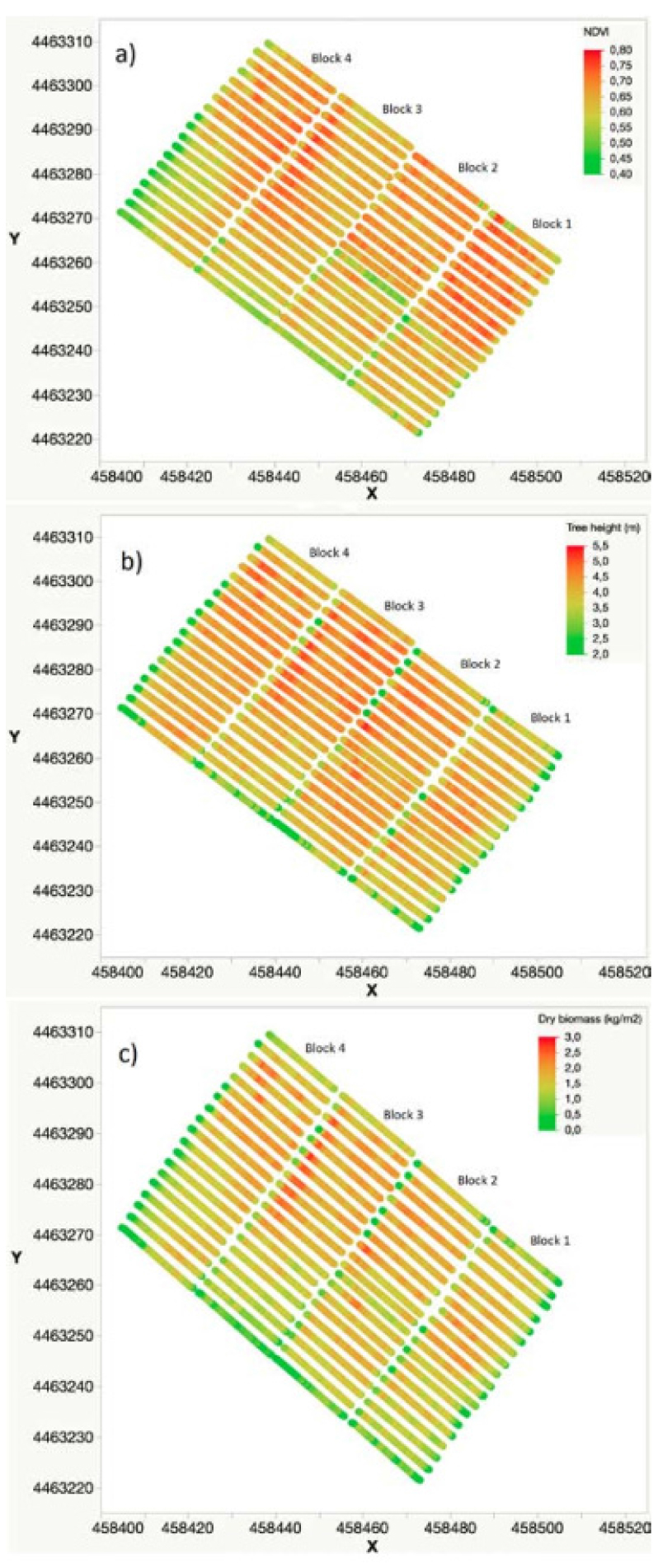
Fig. 7.
Variability of (a) NDVI values, (b) DSM-based tree heights, and (c) modeled dry biomass in the entire poplar plantation (Peña et al., 2018).
소수력에너지
소수력 발전(micro-hydro power)은 소량의 흐르는 물의 수차(위치에너지)를 이용하여 터빈을 회전(기계적 회전에너지)시켜 전기를 얻는 방식을 말한다. 따라서 관심지역의 낙차와 유량 정보로부터 설비 용량이나 발전량을 예측할 수 있다.
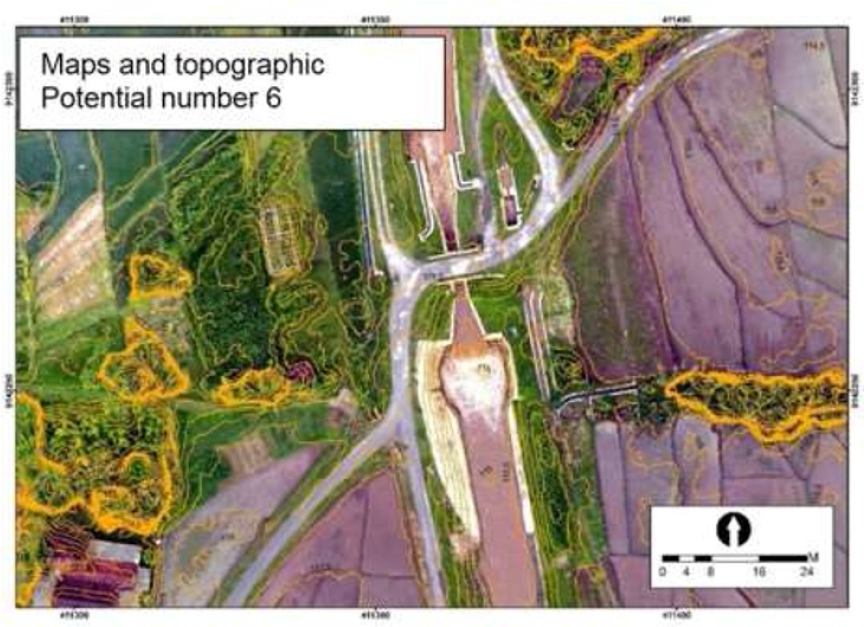
Alatas et al.(2020)은 인도네시아 Kalibawang 관개 지역의 소수력 발전 잠재량을 평가하였다. 소하천의 경사와 인접 지역의 고도 차이를 확인하기 위해 DJI 社의 Phantom 4 드론을 활용하여 7,152 ha 면적의 영역을 촬영하고, 0.5 m급의 DEM을 생성하였다. 구글 어스(Google Earth)에서 평소 물이 흐르는 지역에 대한 디지털 맵의 영상처리한 후 육안 분석을 통해 관개 지역 내에서 최소 3 m부터 최대 8 m까지 낙차가 발생할 수 있는 6개 지점을 추출하였다(Fig. 8). 지역 내 위치한 프로고 강(Progo River)의 유량 정보로부터 각 지점의 유량(flow rate)을 5 m3/s로 계산되었다. 그리고 아래 식 (1)을 이용하여 6개 지점에 대한 발전 잠재량(power potential)을 계산한 결과 125~334 kW의 분포를 보였으며, 전체 합계는 1,418 kW로 계산되었다.
이 때, P = power, ρ = specific weight, g = gravity, H = height difference, Q = flow rate, η = efficiency ratio
결 론
본 연구에서는 국내·외 재생에너지 개발 현장에서 무인항공기 기반의 기술(영상촬영, 사진측량, 원격탐사 등)을 도입하여 활용하고 있는 사례들을 조사하고 분석하였다. 재생에너지원에 따라 다양한 카메라 또는 센서(광학, 열화상, 다분광)가 무인항공기에 부착되어 활용된 것을 확인할 수 있었다. 태양에너지 분야에서 드론으로 촬영한 광학 영상은 현장의 정보 제공과 육안 분석 외에도 3차원 고정밀 지형 및 건물 측량의 용도로 활용되었다. 또한, 열적외선 영상으로부터 열적 특성을 추출하고 분석함으로써 태양광 모듈의 탐치, 추출, 검사, 고장진단 등을 수행하였다. 이와 유사하게 지열에너지 분야에서도 열적외선 영상은 지표의 열적 특성과 이상대 추출 또는 지열부존 지역 탐사에 유용하게 사용되었다. 반면에 풍력에너지 분야에서는 터빈의 외관상의 결함 파악을 위한 근접 촬영이나 소음 측정 등의 목적으로 무인항공기가 사용되었다. 바이오에너지와 소수력에너지의 경우 무인항공기로 촬영한 입체영상으로부터 바이오매스나 지표의 고도를 정밀 측량함으로써 바이오매스 자원량 추정 또는 수차에 의한 소수력발전 가능 부지를 탐색하기도 하였다.
무인항공기 기술은 재생에너지원의 조사, 개발, 유지관리 등 다양한 측면에서 긍정적인 효과를 유발할 수 있다. 기술적 측면에서는 기존의 인공위성 원격탐사에 비해 높은 공간해상도와 시간해상도 자료를 제공할 수 있고, 경제적 측면에서는 부지 조사 또는 모니터링 과정에 소용되는 시간과 비용을 감소시킬 수 있다. 사회적 측면에서 보면 풍력 터빈의 유지관리나 지열 부존 지역 조사 시에 발생될 수 있는 위험성을 저감시켜줄 수도 있다. 이러한 이유로 재생에너지 분야에서 무인항공기 기술의 활용은 지속적으로 확산될 것으로 예상된다. 향후 재생에너지 개발의 안정성과 생산성을 높이기 위한 하나의 방법으로써 무인항공기 기술의 활용에 대한 체계적인 연구를 진행할 필요가 있을 것으로 사료된다.
