

서 론
무인 천공 및 장약 장비 개요
무인 천공 장비
무인 장약 장비
제조사별 무인 천공 장비 개발 동향 및 적용 사례
캐터필러(Caterpillar, 미국)
에피록(Epiroc, 스웨덴)
샌드빅(Sandvik, 스웨덴)
코마츠(Komatsu, 일본)
마인 마스터(Mine Master, 폴란드)
제조사별 무인 장약 장비 개발 동향 및 적용 사례
에나엑스(Enaex, 칠레)
에피록(Epiroc, 스웨덴)
ABB(Asea Brown Boveri, 스위스)
맥린(MacLean, 캐나다)
노르멧(Normet, 핀란드)
토 의
제조사별 무인 천공 장비의 기술적 특징 및 도입 효과
제조사별 무인 장약 장비의 기술적 특징 및 도입 효과
무인 천공 및 장약 장비의 기술적 한계와 발전 방향
결 론
서 론
갱내광산의 핵심 생산 공정은 천공(drilling), 발파(blasting), 적재(loading), 운반(hauling)으로 구성되며, 이 중 천공 및 발파 공정은 낙반(roof fall), 불발(misfire) 등 치명적 안전사고 위험이 상존하는 고위험 작업으로 분류된다(Li and Zhan, 2018). 화약 기술과 안전관리 체계가 지속적으로 발전해 왔음에도 불구하고, 부적절한 폭약 취급, 불안정한 채움재(backfill), 발파 구역 관리 미흡 등으로 인한 부상 및 사망사고는 여전히 발생하고 있다(Bonchis et al., 2014). 2005년부터 2024년까지 국내의 유형별 광산 사망재해 통계에 따르면 전체 사망자 102명 중 낙반·붕락에 따른 사망자는 34명, 화약 발파에 의한 사망자는 6명으로 전체 사망자의 약 40%에 해당한다(KOMIR, 2025). 이는 천공·발파 공정의 안전 확보가 갱내광산의 핵심 생산 공정 전반에서 가장 시급하고 중요한 과제 중 하나임을 보여준다.
한편, 갱내광산에서 정밀한 천공·발파를 통해 적정 파쇄 입도를 확보하는 것은 이후 공정의 효율을 좌우한다. 적정 입도 확보는 2차 파쇄 및 소할발파 작업을 최소화하여 소모품 사용과 운영 비용을 줄이는 경제적 효과로 이어지기 때문이다(Jung et al., 2025). 즉, 천공·발파 공정은 안전 측면에서는 고위험 작업이고, 생산성 측면에서는 전체 공정 효율을 결정하는 핵심 단계라는 이중적 특성을 가진다. 이러한 배경에서 작업자를 위험 구역으로부터 완전히 배제하면서도 발파 품질과 효율을 안정적으로 확보하기 위한 무인화·자동화 기술의 필요성이 빠르게 확대되고 있으며, 이를 구현하는 무인 천공·장약 장비의 개발이 가속화되고 있다.
무인 천공·장약 장비는 원격제어(remote control), 원격조종(teleoperation), 자동 제어, 로봇 및 인공지능(Artificial Intelligence, AI)을 기반으로 작업자가 장비에 직접 탑승하지 않고도 천공 및 장약 작업을 수행할 수 있도록 설계된 시스템을 의미한다. 이러한 장비의 무인화·자동화를 위해 GNSS(Global Navigation Satellite System), LiDAR(Light Detection and Ranging), 3D 스캐너 등 다양한 센서 융합 기술이 적용되고 있으며, 정밀 천공 제어, 작업 경로 최적화, 자동 장약, 현장 안전성 향상 등을 목표로 한 기술 개발이 글로벌 제조사를 중심으로 활발히 진행되고 있다.
최근 연구에서는 무인 천공 장비가 단순 원격조종 단계를 넘어 자동 점보 드릴(automatic jumbo drill) 또는 지능형 천공 시스템(intelligent drilling system)으로 고도화되는 추세를 보이고 있다. 이 과정에서 막장 인식, 최적 천공 패턴 설계, 실시간 천공 데이터 분석이 핵심 기술 요소로 제시되고 있다. Li et al.(2023)은 차량 탑재형 3D 스캐너를 이용해 터널 막장의 윤곽을 추출하고 최적 천공 경로를 계획하는 방법을 제안하였으며, Nikolakopoulos et al.(2025)은 시추 데이터 기반 암반 3차원 모델 생성과 AI 기반 최적 작업 의사결정 구조를 제시하였다. 또한 GPS(Global Positioning System) 활용이 어려운 지하 환경에서의 자율주행을 위해 SLAM(Simultaneous Localization and Mapping) 기술을 적용하였다. Liu et al.(2024)은 천공 과정에서 취득되는 추진 속도와 압력 등의 운전 데이터를 분석하여 천공 상태를 실시간으로 평가하는 시스템을 개발하였다.
한편, 무인 장약 장비는 로봇 장약 시스템(robotic charging system)을 중심으로 발전하고 있으며, 발파공(blasting hole) 인식, 로봇팔 기반 정밀 장약, 원격·자동 장전 기술이 핵심 요소로 다뤄지고 있다. Bonchis et al.(2014)은 무인 장약 장비의 주요 기능으로 발파공 감지, 원격조종, 자동 로봇팔 제어, 시각 서보(visual servoing)에 의한 자동 정렬 기능을 제시하였다. Li et al.(2025)은 폭약 운반차와 장약 로봇 간의 상호 통신과 협력 작업 개념을 제시함으로써, 개별 장비 수준의 자동화를 넘어 장비 간 지능형 상호작용에 기반한 협업 시스템을 제안하였다.
이와 같이 무인 천공 및 장약 장비는 정밀도, 안전성, 생산성 향상을 목표로 고도화되고 있으며, 천공과 장약 공정을 통합한 자동화 시스템 구현에 관한 연구도 활발히 진행되고 있다. 본 논문에서는 이러한 연구적·산업적 흐름을 토대로 무인 천공 및 장약 장비의 구성과 핵심 기술을 정리하고, 글로벌 제조사별 개발 동향과 광산 현장 도입 사례를 종합적으로 고찰함으로써 향후 자율 천공·장약 시스템 구현을 위한 기술적 기반과 시사점을 제시하고자 한다.
무인 천공 및 장약 장비 개요
무인 천공 장비
무인 천공 장비는 광산 또는 터널 현장에서 발파를 위한 발파공을 자동 또는 원격으로 굴착하는 장비로, 작업 수행 과정의 전부 또는 일부를 무인화하여 운영된다. 적용 환경과 작업 조건에 따라 무인 천공 장비는 다음과 같이 구분될 수 있다.
노천광산 및 토목 현장: 지면에 수직 천공을 수행하기 위해 크롤러 드릴(crawler drill)이 주로 활용된다.
갱내광산 및 터널 공사 현장: 막장 확장과 발파공 천공을 목적으로 점보 드릴(jumbo drill)이 사용된다.
무인 천공 장비는 3D 스캐너를 이용해 막장 면을 스캔하고, MWD(Measurement While Drilling), GNSS, LiDAR 등 다양한 센서를 융합하여 장비의 위치 인식과 작업 정밀도를 향상시킨다. 이를 통해 막장 형상에 기반한 정밀 천공과 최적의 작업 경로 주행이 가능해진다. 작업자는 별도로 마련된 제어 스테이션에서 장비를 원격으로 조작할 수 있어, 위험 구역으로부터 완전히 분리된 상태에서 작업을 수행할 수 있다.
최근에는 고정밀 천공을 위해 증강현실(Augmented Reality, AR) 기반 작업 지시 시스템, 막장 형상 3차원 스캐닝, 경로 최적화 알고리즘, 센서 융합 기반 위치 인식 기술 등이 무인 천공 장비에 적용되고 있다. 이러한 기술 발전을 통해 천공 정밀도 향상, 작업자 안전성 확보, 작업 시간 단축 등의 효과가 보고되고 있다.
무인 장약 장비
무인 장약 장비는 천공된 발파공에 폭약을 자동 또는 원격으로 삽입하는 장비로, 발파 공정 중 작업자의 위험 노출을 최소화하기 위한 핵심 기술로 주목받고 있다. 무인 장약 장비에는 다음과 같은 주요 기술 요소가 포함된다.
발파공 위치 인식 및 선택: 태블릿, AR 장치 또는 센서를 활용하여 천공 패턴과 위치 정보를 확인하고, 장약 대상 발파공을 자동으로 식별한다.
정밀 장약을 위한 로봇팔 제어: 로봇팔 또는 자동 삽입 장치를 정밀하게 구동하기 위해 고도화된 경로 계획 및 위치 보정 기술이 요구된다.
원격·자동 장전: 작업자의 위험 노출을 최소화하기 위한 원격 조작 및 자동화된 장전 기능이 적용된다.
이러한 기술을 탑재한 무인 장약 장비는 3D 스캐너를 이용해 천공된 영역을 자체적으로 스캐닝하고, 발파공을 자동으로 탐지한 후 로봇팔을 통해 장약 작업을 수행한다. 또한, 무선 전자뇌관을 활용함으로써 기존의 물리적 연결 작업을 제거하고 작업 안전성과 효율성을 동시에 향상시킨다. 작업자는 별도로 마련된 제어 공간에서 장비를 원격으로 제어할 수 있어, 장약 단계에서의 안전성이 강화된다.
최근 무인 장약 기술은 단순한 장약 자동화 수준을 넘어, 장약 차량과 폭약 공급 시스템 간의 지능형 협업, 센서 기반 작업 안전성 강화, 장약 품질의 정량적 관리 등으로 발전하고 있으며, 발파 공정 전반의 자동화와 고도화를 위한 핵심 요소로 자리매김하고 있다.
제조사별 무인 천공 장비 개발 동향 및 적용 사례
캐터필러(Caterpillar, 미국)
Caterpillar의 CAT® MineStar™ Terrain 및 Command for Drilling 시스템은 GNSS, MWD, LiDAR 등 다중 센서 융합 데이터를 기반으로 한 고도화된 드릴링 자동화 플랫폼을 구축하고 있다(Caterpillar, 2025a). 해당 시스템은 정밀 천공, 자율 제어, 지층 분석, 안전 관리 기능을 통합 제공함으로써 무인·자동 천공 기술의 상용화를 선도하고 있다. GNSS 기반 고정밀 유도 시스템은 드릴의 위치, 각도, 천공 깊이를 실시간으로 제어하여 약 ±10 cm 수준의 위치 정밀도를 확보한다. 또한 다수의 드릴 간 발파공 상태 정보를 공유함으로써 중복 천공이나 발파공 누락을 방지할 수 있으며, 이를 통해 기존 대비 발파공 위치 오차를 약 4배 감소시키고 현장 측량 작업의 필요성을 크게 줄였다.
MWD(Measurement While Drilling) 센서는 누름힘(downforce), 회전 속도, 토크 등 천공 중 운전 데이터를 실시간으로 수집하여 암석 강도와 지층 경계를 분석하고, 이를 기반으로 Blastability Index(발파효과지수)를 산정한다. 이러한 분석 결과는 폭약 장전량과 천공 패턴 최적화에 활용되어 폭약 사용량 절감, 균일한 파쇄 품질 확보, 2차 발파 감소 등의 효과로 이어진다.
한편, LiDAR 기반 안전 감시 기능은 작업 반경 내 장애물과 위험 구역을 실시간으로 탐지하여 가상 안전 구역(avoidance zone)을 설정하고, 불발탄 발파공 회피 및 장비 충돌 방지 기능을 수행한다. 디지털 드릴 플랜(digital drill plan)은 3차원 지형 데이터를 기반으로 발파공 배치를 자동 생성하며, 작업 진척도, 소모품 사용량, 장비 가동 상태 등의 정보를 MineStar™ 서버에 실시간으로 기록함으로써 작업 스케줄의 신뢰성과 장비 정비 효율을 동시에 향상시킨다.
호주의 한 석탄 광산에서는 MineStar™ Command for Drilling이 적용된 로터리 천공 장비(rotary drilling machine)를 도입하여 무인·자율 천공 운용을 수행하고 있다. 해당 현장에서는 한 명의 작업자가 원격 운영 센터에서 근무하며, 사전에 정의된 천공 패턴에 따라 3대의 드릴에 대해 단일 열(single-row) 자율 천공을 동시에 시작하도록 명령을 내린다. 이후 다음 열로 이동하도록 지시하는 작업을 제외한 대부분의 천공 과정은 MineStar™ Command for Drilling 시스템을 통해 자동으로 수행된다.
그 결과 천공 성능이 약 20% 향상되었으며, 드릴 가동률 증가로 장비당 하루 20시간 이상의 연속 운전이 가능해졌다(Caterpillar, 2025b). 또한 발파공 위치 정확도가 크게 향상되어 재천공이 거의 발생하지 않는 것으로 보고되었다. Fig. 1(a)는 제어실에서 천공 장비를 원격으로 제어하는 작업자를 나타내며, Fig. 1(b)는 호주 석탄 광산에서 MineStar™ Command for Drilling 시스템이 적용된 천공 장비의 현장 전경을 보여준다.
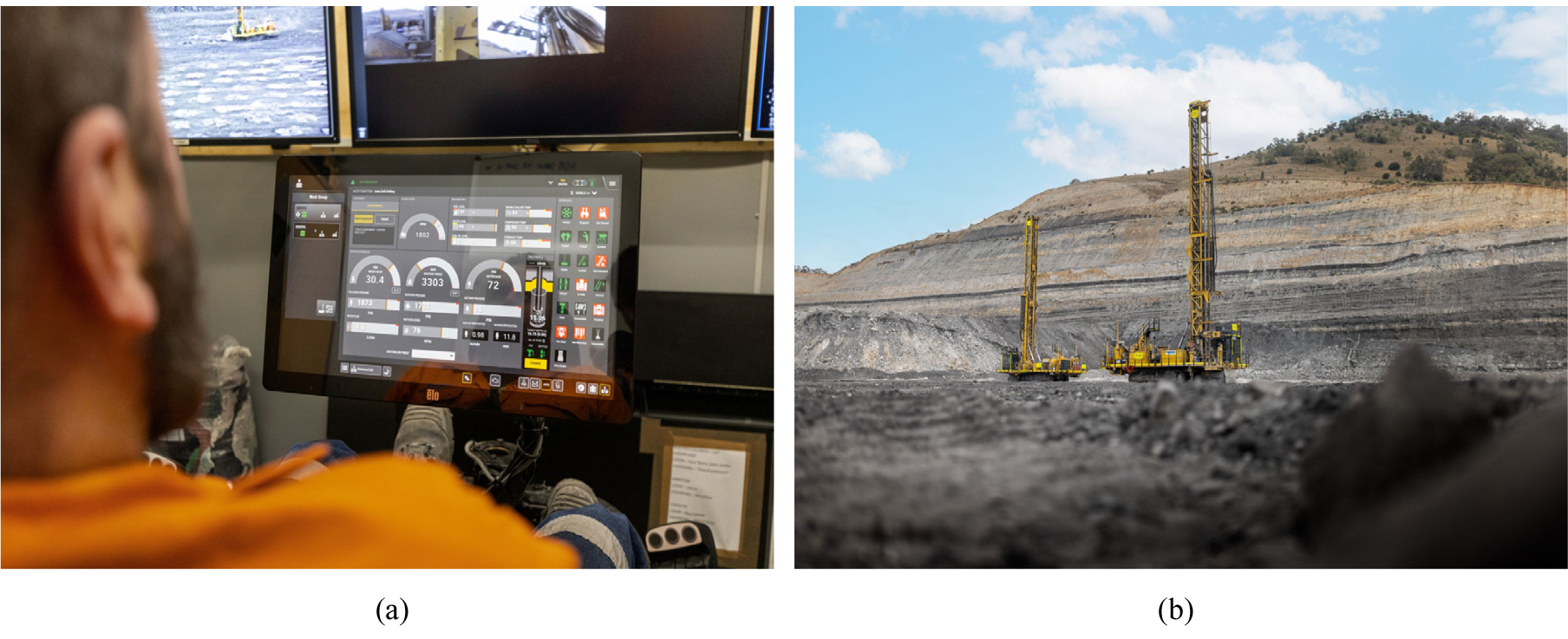
Fig. 1.
Cat® MineStar™ Command for drilling at an Australian coal mine: (a) Control-room operation, (b) Drilling machine at work (Caterpillar, 2025b).
에피록(Epiroc, 스웨덴)
Epiroc은 단계적 무인화 전략을 기반으로 한 원격·자동 천공 기술을 중심으로 무인 천공 장비를 개발하고 있으며, 대표적인 원격제어 솔루션으로 BenchREMOTE 시스템을 제공하고 있다. BenchREMOTE는 작업 현장에서 최대 약 100 m 떨어진 위치에서도 천공 장비를 원격으로 제어할 수 있는 시스템으로, SmartROC D65, D60, D50 등 다양한 노천광산용 천공 장비에 적용된다. 제어 스테이션은 이동식 구조로 설계되어 현장 여건에 따라 설치 위치를 유연하게 조정할 수 있으며, 원격 작업자는 실시간 센서 데이터와 영상 정보를 기반으로 천공 상태를 모니터링하고 장비를 제어한다.
BenchREMOTE는 단순한 원격 조종 기능을 넘어, 천공 과정에서 수집된 작업 데이터를 체계적으로 저장·분석함으로써 장비 운영 효율화와 생산성 향상에 기여한다. Fig. 2는 Epiroc SmartROC D65 천공 장비와 BenchREMOTE 제어 스테이션의 구성 및 운용 모습을 나타낸다.

Fig. 2.
Epiroc’s unmanned drilling system. (a) SmartROC D65 drilling machine. (b) BenchREMOTE control station (Epiroc, 2025c).
체코의 Fospol 석회석 광산에서는 Epiroc SmartROC D50 MKII를 기반으로 한 Explosia 무인 천공 장비와 원격제어 시스템을 도입하여 상용 운용을 수행하고 있다. 해당 시스템은 근거리(remote proximity) 제어, DTH(Down-The-Hole) 자동 천공, 단일 발파공 자동 천공(one-hole automation), 천공 위치 내비게이션 기능을 제공함으로써 작업 생산성과 에너지 효율을 동시에 향상시켰다. 도입 결과, 천공 생산성이 약 30% 증가하였으며 에너지 소비량은 30~50% 절감되는 성과가 보고되었다(Epiroc, 2025a).
한편, Epiroc은 갱내광산 환경에 적합한 자동화 천공 장비도 적극적으로 상용화하고 있다. 국내 대성 엠디아이(Daesung MDI) 삼척사업소에서는 석회석 채굴을 위해 Boomer S2 장비를 도입하여 천공 작업을 수행 중이다. 해당 장비는 지능형 자동화 기능을 갖추고 있어, 협소한 갱내 공간에서도 우수한 조작성과 실시간 3차원 스캐닝 화면을 제공한다. 특히 디지털 천공 계획을 기반으로 자동 천공을 수행하는 ABC(Advanced Boom Control) Total 기능을 통해 작업 효율을 극대화하고 운영 비용 절감 효과를 달성하고 있다. 무인·자동화 천공 장비 도입 이후 기존 대비 10~20% 수준의 광석 생산량 증가가 보고되었으며, 숙련 작업자 확보가 어려운 현장 여건에서 인력 운영 측면의 부담 완화에도 기여한 것으로 평가된다. 현재 삼척광산의 자동화 장비 적용 비율은 약 33% 수준이다(Epiroc, 2025b).
샌드빅(Sandvik, 스웨덴)
Sandvik은 광산 장비 전반에 적용 가능한 통합 무인 제어 플랫폼인 AutoMine®을 중심으로 무인·자율 천공 기술을 개발하고 있다. AutoMine®은 무인 운반, 적재, 천공 장비를 통합적으로 제어할 수 있는 시스템으로, 특히 AutoMine® Mapping Solution을 통해 실시간 매핑 기반 자율 작업을 구현한다(Sandvik, 2025). 해당 솔루션은 장비에 탑재된 온보드 스캐너(on-board scanner)를 활용해 작업 환경을 실시간으로 3차원 모델링하고, 생성된 3D 지형 정보를 바탕으로 장비의 주행 경로와 천공 작업을 자동으로 계획·조정한다.
AutoMine® 시스템에서는 작업자가 제어실의 대형 디스플레이를 통해 장비의 작업 상태와 진척 상황을 실시간으로 모니터링할 수 있으며, 시스템은 작업 환경 변화에 따라 주행 경로와 천공 계획을 자동으로 최적화한다. 이를 통해 작업 정밀도와 안전성을 동시에 향상시키는 것이 특징이다.
국내에서는 아세아시멘트 석회석 광산에 Sandvik의 원격·자동 천공 장비가 도입되어 상용 운용되고 있다. 해당 장비는 드론 측량 데이터를 기반으로 설정된 천공 각도, 방향, 깊이에 따라 자동으로 천공 작업을 수행하며, 붐(boom)은 설계 좌표에 맞춰 정밀하게 위치를 조정하고 천공 중 발생하는 경사도를 자동으로 보정한다. 이로 인해 작업자의 숙련도나 경험 차이에 따른 품질 편차 없이 일정한 수준의 발파 품질을 안정적으로 확보할 수 있게 되었다.
또한 천공 장비는 별도로 마련된 원격조종 스테이션에서 운용되기 때문에 추락이나 낙반과 같은 위험 요소에 대한 작업자 노출이 크게 감소하였다. 자동화 장비 도입 이후 천공 정확도와 파쇄석 품질이 향상되었으며, 연간 천공 장비 가동 시간 감소, 화약 사용량 절감, 경유 및 에어캡 사용량 감소 등의 효과가 종합적으로 나타났다(Asia Cement, 2025). Fig. 3은 아세아시멘트 석회석 광산에 도입된 Sandvik DP1100i 천공 장비와 원격조종 스테이션의 모습을 보여준다.

코마츠(Komatsu, 일본)
Komatsu는 지하 경암 채굴 환경에 특화된 전동화 기반 무인·자동 천공 장비 개발을 통해 천공 공정의 안전성과 지속가능성을 동시에 강화하고 있다. 대표 장비인 ZJ32Bi 배터리 전동 점보 드릴은 무호스(hoseless) 붐 구조, 지능형 제어 시스템, 모듈형 배터리 전동 구동계를 적용하여 지하 환경에서의 천공 효율과 자동화 수준을 극대화한 장비이다(Komatsu, 2025).
ZJ32Bi에 적용된 무호스 붐 기술은 붐 내부에서 유체와 신호를 전달함으로써 외부 호스를 제거한 구조로, 호스 손상에 따른 가동 중단(downtime)을 근본적으로 해소하고 장비 마모를 최소화한다. 이를 통해 장기 운용 시에도 안정적인 천공 정밀도와 높은 신뢰성을 유지할 수 있으며, 유지보수 부담 감소 효과도 함께 달성한다. 또한 최대 130 kW급 모듈형 배터리 전동 구동 시스템을 적용함으로써 디젤 장비 대비 소음과 배출가스를 크게 저감하고, 환기 부담이 큰 지하 작업 환경에서 작업자 안전과 작업 환경을 개선한다. 반자율 제어 기능을 통해 천공 작업의 일관성과 반복 정밀도를 향상시키는 한편, 작업자의 직접 개입을 최소화하여 안전성을 강화하였다.
이러한 기술적 특징을 통해 Komatsu의 전동 점보 드릴은 정비 부담 감소, 작업 지속시간 증가, 운영 효율 향상이라는 복합적인 효과를 동시에 달성하며, 지하광산 천공 장비의 전동화·자동화 방향을 제시하고 있다.
마인 마스터(Mine Master, 폴란드)
Mine Master는 저천반(low-profile) 및 협소 광체(narrow vein) 지하광산 환경에 특화된 장비 개발을 통해, 제한된 공간에서도 자동화·전동화 기반의 안전하고 효율적인 천공·지보 솔루션을 제공하고 있다. Mine Master의 장비군은 자율주행, 자동 천공, 전동화, 작업 안전성 강화 기술을 통합 적용하여 지하 협소 공간에서도 높은 생산성과 작업 안전성을 동시에 확보한 것이 특징이다. 특히 FLP1410 점보 드릴은 업계에서 드물게 완전 자동 천공이 가능한 자율 천공 시스템(Autonomous Drilling System, ADS)을 탑재한 장비로, 작업자 교대 시간에도 자율적으로 천공 작업을 수행할 수 있다. 이를 통해 장비 유휴 시간을 최소화하고, 한 명의 작업자가 여러 대의 장비를 원격으로 관리할 수 있어 작업 효율성과 천공 정밀도가 동시에 향상된다.
Roof Master 1.7KA는 자동 드릴링 마스트(automatic drilling mast)를 적용한 지보 장비로, 갱도 높이 1.6~4.5 m의 저천반 환경에서도 볼트 체결 작업을 자동화할 수 있다. 이를 통해 작업자의 위험 노출을 최소화하고, 반복 작업에 따른 소모품 마모를 줄여 장비 신뢰성과 작업 안전성을 향상시킨다. 한편, Face Master 1.7KE와 Roof Master 1.8KE는 최대 120 kWh급 배터리 전동 구동계를 적용한 저천반 전기 모델로, 무배출·저소음 운전을 통해 환기 부담이 큰 지하광산 환경에서 작업 환경 개선과 운영 효율 향상에 기여한다. 이와 함께 SWOI 1.4 및 1.7 임시 유압식 지보 시스템과 Roof Scaler 2.0SB 원격 스케일링 장비는 갱내 지붕 안정성 확보와 낙반 위험 저감을 통해 작업 안전성을 추가적으로 강화한다.
이와 같이 Mine Master의 저천반 장비군은 자동화와 전동화를 기반으로 한 고정밀 제어 기술을 통해, 공간 제약이 큰 지하광산에서도 안전성과 생산성을 극대화한 전문화된 지하 채굴 솔루션으로 평가된다. Fig. 4는 갱내광산에서 작업 중인 Mine Master의 무인 천공 장비를 보여준다.

제조사별 무인 장약 장비 개발 동향 및 적용 사례
에나엑스(Enaex, 칠레)
칠레의 Enaex는 갱내광산 발파 공정의 안전성 향상을 목표로 원격·자동화 기반 무인 장약 장비를 개발하고 있으며, 대표 장비로 UG-iTruck®을 상용화하고 있다. UG-iTruck®은 원격조종과 부분 자동화 기술을 기반으로 폭약 장약 작업을 수행하는 장비로, 장거리 원격조종과 자율주행 기능을 지원하여 장약 공정의 안전성과 자동화 수준을 크게 향상시킨다. 특히 갱내광산 환경에서의 적용성이 높고, 기존 천공 및 운반 장비와의 호환성이 우수하다는 장점을 가진다.
UG-iTruck®은 천공된 발파공 영역을 자동으로 측정하고, 폭약 장전 과정을 자동화함으로써 발파 공정에 필요한 주요 작업을 통합적으로 수행할 수 있다. 장약 작업을 담당하는 로봇팔은 ROS(Robot Operating System) 기반 제어 시스템으로 운영되며, 발파공 인식, 위치 정렬, 정밀 장약 기능을 수행한다. 작업자는 별도로 마련된 원격제어 공간에서 장비를 운용할 수 있으며, 무선 통신 기술을 활용해 태블릿 PC를 통해 장약 위치 정보와 작업 진행 상황을 실시간으로 모니터링함으로써 연속 작업의 효율을 향상시킨다.
Enaex의 무인 장약 장비는 칠레 국영 광산 기업 Codelco가 운영하는 El Teniente 구리광산에 적용되어 상용 운용 사례를 확보하였다. 해당 광산에서는 2022년 갱내 장약 작업 중 발생할 수 있는 낙반 사고로부터 작업자를 보호하기 위해 무인 장약 장비 원격제어 시스템(Enaex Robotics 공급)을 도입하였으며, 이를 통해 100% 원격 장약 작업을 수행하였다. 그 결과, 작업자가 위험 구역에 노출되는 인시(person-hours)가 80% 이상 감소한 것으로 보고되었다(Enaex, 2025b).
해당 시스템은 갱내 막장 면의 천공 지점을 자체적으로 스캐닝한 후 로봇 장전 팔을 이용해 폭약을 주입하며, 전폭약과 뇌관을 자동으로 조합하여 장약을 수행한다. 이후 무선 전자뇌관을 활용해 발파를 진행함으로써 물리적 연결 작업을 제거하고 작업 안전성을 크게 향상시켰다. 또한 이러한 일련의 장약 공정은 전용 원격제어 밴(vehicle)에서 통합적으로 제어·감시될 수 있도록 구성되어 있다. Fig. 5는 El Teniente 구리광산에 도입된 Enaex의 무인 장약 장비 운용 사례를 보여준다.

Fig. 5.
Unmanned explosive-charging system deployed at the El Teniente copper mine in Chile (6Enaex, 2025a).
에피록(Epiroc, 스웨덴)
Epiroc은 발파 기술 전문 기업 Orica와의 협업을 통해 장약 공정의 기계화 및 자동화를 고도화한 Avatel™ 시스템을 개발하였다. Avatel™은 세계 최초의 완전 기계화·반자율(semi-autonomous) 장약 시스템으로, Epiroc의 Boomer M2 캐리어를 기반으로 한 트윈 붐 구조를 활용하여 장약 작업을 수행한다(Orica, 2025). 해당 시스템은 작업자의 직접적인 장약 개입을 최소화함으로써 발파 공정의 안전성과 작업 효율을 동시에 향상시키는 것을 목표로 한다.
Avatel™은 Orica의 무선 전자뇌관 시스템인 WebGen™을 적용하여 기존 장약 공정에서 필수적이었던 물리적 연결 작업(tie-ins)을 제거하였다. 이를 통해 장약 및 발파 과정이 단순화되고, 작업 시간이 단축됨과 동시에 작업자의 위험 노출 가능성이 크게 감소하였다. 또한 무선 기폭 기술을 기반으로 장약 품질의 일관성과 발파 신뢰성 확보에도 기여한다. 장비 제어 측면에서는 Epiroc의 RCS5(Rig Control System, version 5)가 적용되어 듀얼 다기능 조이스틱과 대형 디스플레이를 갖춘 직관적인 사용자 인터페이스를 제공한다. 이를 통해 작업자는 장약 공정을 보다 정확하고 안정적으로 제어할 수 있으며, 시스템 상태와 작업 진행 상황을 실시간으로 모니터링할 수 있다. 작업자는 폭약이 장전되는 위험 구역으로부터 수 미터 떨어진 위치에서, ROPS(Roll Over Protection Structure) 및 FOPS(Falling Object Protective Structure) 인증을 받은 밀폐형 운전실 내부에서 장약 작업을 수행할 수 있어 작업 안전성이 크게 강화된다.
Avatel™ 시스템은 한 명의 작업자가 장약 사이클 전체를 안전하게 수행할 수 있도록 설계되어, 안전성 향상과 함께 인력 운용 효율성 증대라는 부가적인 효과도 제공한다(INTERNATIONAL MINING, 2025). 이러한 특징을 통해 Avatel™은 장약 공정의 기계화·자동화 전환을 대표하는 상용 사례로 평가되며, 무인 장약 기술의 실질적인 현장 적용 가능성을 보여주는 중요한 사례로 자리매김하고 있다.
ABB(Asea Brown Boveri, 스위스)
ABB는 산업용 로봇 기술을 광산 발파 공정에 적용하여, 작업자 개입을 최소화한 완전 자동화 장약 시스템을 개발하고 있다. Automated Robot Charger는 갱내광산의 무지지 암반면에서 작업자를 대신해 로봇이 폭약을 장입하는 원격 자동화 장약 시스템으로, ABB가 Boliden 및 LKAB와 공동으로 개발하였다. 해당 시스템은 산업용 로봇 암(industrial robot arm)과 비전 인식 시스템을 결합하여 발파공을 자동으로 탐지·정렬하고, 폭약과 기폭장치를 정밀하게 장입하는 것을 목표로 한다.
Automated Robot Charger는 운반차와 연동되어 발파공 탐지, 기폭장치 조립, 폭약 주입에 이르는 장약 공정 전 단계를 자동으로 수행한다. 특히 2축 로봇 암(dual robot arms) 구조를 적용함으로써 발파공의 높이와 위치에 관계없이 접근이 가능하며, 복잡한 막장 형상에서도 안정적인 장약 작업을 수행할 수 있다. 또한 기존 장약 트럭에 레트로핏(retrofit) 방식으로 부착이 가능하도록 설계되어, 신규 장비 도입 없이도 시스템 적용이 가능하다는 장점을 가진다. 작업자는 별도의 원격제어 환경에서 전체 장약 공정을 모니터링하고 제어할 수 있으며, 이를 통해 장약 단계에서의 위험 노출을 근본적으로 제거할 수 있다. 해당 시스템은 스웨덴 Boliden이 운영하는 Garpenberg 아연 광산에서 약 1 km 심도의 지하 환경에서 실증 시험을 완료하여, 실제 광산 조건에서 무인 장약 공정의 기술적 실현 가능성을 입증하였다(ABB, 2025).
현재 ABB는 Automated Robot Charger 기술을 기반으로 완전 자율 장약 단계로의 고도화를 추진하고 있으며, 다양한 암질과 작업 환경을 가진 광산으로 적용 범위를 확대하기 위해 다수의 글로벌 광산 기업과 공동 개발을 진행 중이다. Fig. 6은 갱내광산 암벽면에서 ABB의 무인 장약 시스템이 장약 작업을 수행하는 모습을 보여준다.

Fig. 6.
Unmanned robotic system performing explosive charging at a rock face in an underground mine (ABB, 2025).
맥린(MacLean, 캐나다)
MacLean은 갱내광산의 소할발파(secondary blasting) 공정에서 작업자 안전을 강화하기 위한 자동·원격 장약 기술을 중심으로 무인 장약 장비를 개발하고 있다(MacLean, 2025). Auto Explosive Charger는 무선 폭약 장전 기술을 적용한 자동 장약 시스템으로, 드로포인트(drawpoint), 통로 막힘(hang-up), 대형 암편(fragment) 제거와 같은 고위험 작업에서 안전하고 효율적인 소할발파 수행을 목적으로 한다.
Auto Explosive Charger는 로딩 캐러셀(loading carousel), 제어 패키지, HMI(Human–Machine Interface)로 구성되며, 다수의 무선 폭약을 자동으로 장전할 수 있도록 설계되었다. 기존 장약 공정에서 필요했던 리드선(lead-line)이나 유선 연결 없이, 암반·공기·수분을 매개로 한 무선 통신 기술을 통해 폭약을 기폭함으로써 장약 및 발파 과정의 복잡성을 크게 줄였다. 이러한 무선 장전·기폭 방식은 작업자의 직접 개입을 최소화하고, 장약 작업 중 발생할 수 있는 안전사고 위험을 효과적으로 감소시킨다.
또한 Auto Explosive Charger에는 MacLean IQ Series Tele-Remote Control 기능이 통합되어, 작업자가 원격 위치에서 폭약 장전과 발파 과정을 제어할 수 있다. 이를 통해 현장에 작업자가 직접 접근하지 않는 ‘No boots on ground’ 무인 작업 환경을 구현하며, 고위험 구간에서의 인적 노출을 근본적으로 제거한다. 해당 시스템은 BH3 블록 홀러(blockholer) 및 중거리 세컨더리 브레이커 모델에 적용 가능하여, 다양한 갱내 조건에서 유연하게 활용될 수 있다.
이와 같은 자동·원격 장약 기술을 통해 MacLean의 무인 장약 장비는 소할발파 공정에서 안전성, 인체공학적 작업 환경, 생산성을 동시에 향상시키는 솔루션으로 평가되며, 갱내광산 발파 공정 자동화의 실질적인 대안으로 주목받고 있다. Fig. 7은 MacLean의 무인 장약 장비 운용 사례를 보여준다.

노르멧(Normet, 핀란드)
Normet은 서보 구동 로봇 기술과 자동화 장약 공정을 결합한 무인 장약 장비를 개발하며, 대표 장비로 Charmec Revo®를 상용화하고 있다(Normet, 2025). Charmec Revo®는 원격제어 기반 서보-로봇팔(servo-robotic arm)을 활용하여 갱내광산에서 폭약을 장약하는 장비로, 작업자를 고위험 노출 구역에서 분리된 안전 지보 구역으로 이동시킴으로써 장약 공정의 안전성을 획기적으로 향상시킨다. 해당 장비는 단면 크기 약 4×4 m에서 6×6 m 범위의 대부분의 갱내광산 터널 환경에 적용 가능하도록 설계되었으며, 생산성 저하 없이 안전성 강화를 달성하는 것을 목표로 한다.
Charmec Revo®는 전폭약(뇌관–부스터 패키지)을 집어 운반하고(pick-and-deliver) 폭약을 발파공에 주입하는 전 과정을 로봇팔이 수행한다. 발파공과 홈 포지션 간 이동 경로는 완전 자율화되어 있으며, 자체 개발한 머신 비전 시스템을 통해 발파공 위치를 자동으로 인식한다. 또한 천공 장비에서 생성된 천공 맵을 업로드하여 장약 작업에 활용함으로써 작업 정확도와 효율을 동시에 향상시킨다.
로봇팔 제어는 역기구학(inverse kinematics) 기반으로 이루어지며, 로봇팔 말단(end-effector)의 위치와 방향만을 입력함으로써 복잡한 관절 움직임을 자동으로 계산한다. 이를 통해 작업자는 로봇 제어에 대한 전문 지식 없이도 직관적으로 장약 작업을 수행할 수 있다. REVO 시스템은 천공 데이터를 불러오거나 머신 비전을 통해 천공 위치를 직접 인식한 후, 장약 작업을 자동으로 수행하여 전체 작업 시간을 단축한다. 천공 위치가 확인되면 장약 호스 시스템을 통해 기폭기와 폭약이 자동으로 전달된다. 사용자 편의성과 안전성 확보를 위해 인터페이스와 제어 방식은 직관적으로 설계되었으며, 로봇팔은 수동 모드, 자동 조준 모드, 완전 자율 모드의 세 가지 운용 방식을 제공한다. 또한 충돌 방지 시스템과 초음파 안전 센서를 적용하여 장비와 터널 벽, 장애물 간의 충돌을 방지하고 근접 사고를 예방한다.
Fig. 8은 Charmec Revo®의 주요 구성 요소와 핵심 기능을 나타낸다. 초음파 센서, 머신 비전용 카메라, 작업등은 원격 운용 시 장비의 위치 인식과 시야 확보를 지원하며, 작업자 안전 구역 센서는 로봇팔의 작동 반경 내 인체 접근을 감지해 장비 동작을 즉시 정지시킨다. 또한 그래픽 사용자 인터페이스(GUI)는 로봇팔의 움직임과 장약 공정을 직관적으로 제어·모니터링할 수 있도록 설계되어, 무인 장약 장비의 실질적인 현장 적용성을 높이고 있다.
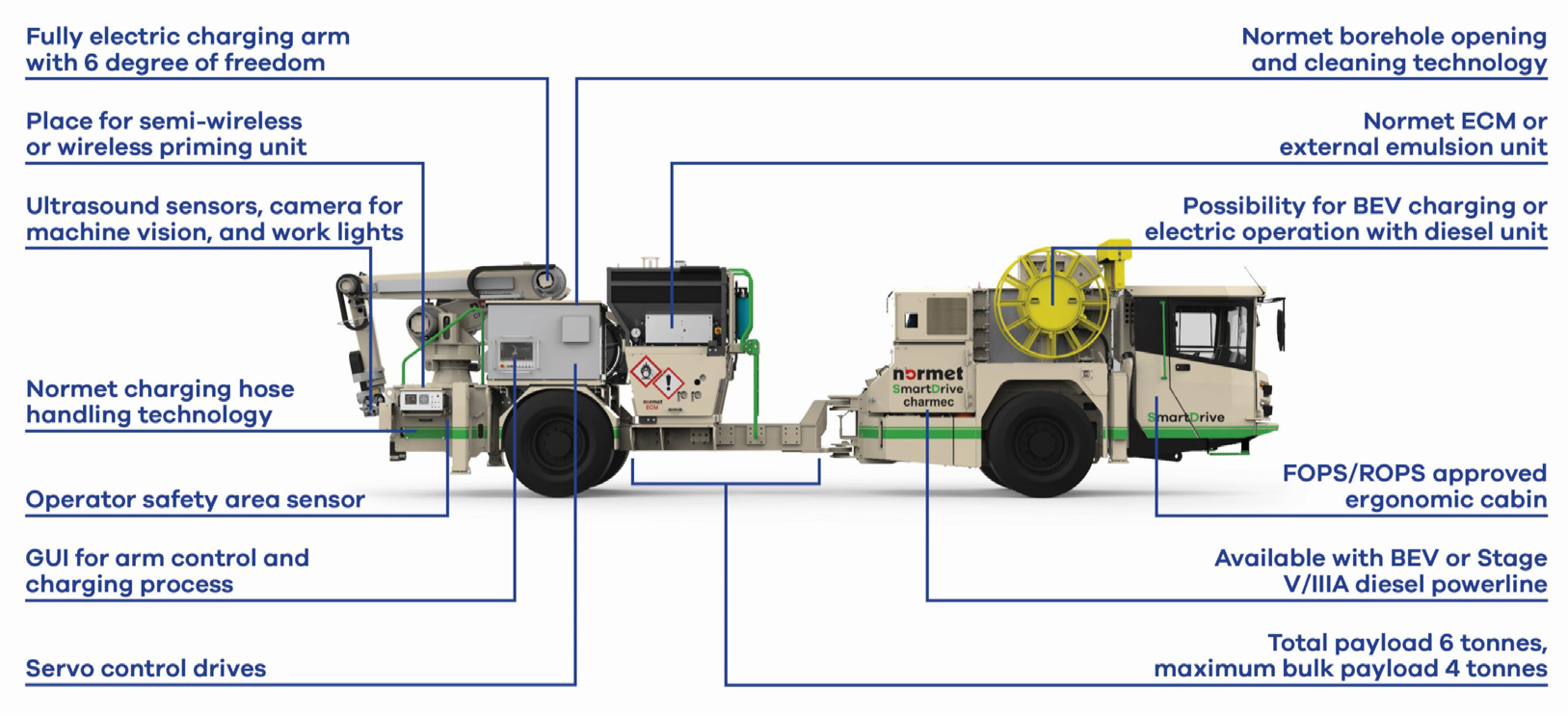
Fig. 8.
Photos showing the main components and features of the Charmec Revo® unmanned explosive-charging system (Normet, 2025).
토 의
제조사별 무인 천공 장비의 기술적 특징 및 도입 효과
Table 1은 3장에서 살펴본 주요 무인 천공 장비 제조사별 제어 시스템, 대표 장비, 핵심 기술 요소 및 도입 성과를 종합적으로 정리한 것이다. 각 제조사는 적용 환경과 기술 전략에 따라 상이한 자동화 접근 방식을 채택하고 있으나, 공통적으로 정밀 제어 기술과 원격·자율 운용을 통해 작업 안전성과 생산성 향상을 달성하고 있다.
Table 1.
Comparison of Representative Unmanned Drilling Systems by Manufacturer: Control Strategies, Key Technologies, and Deployment Outcomes
Caterpillar는 GNSS, LiDAR, MWD 등 다중 센서를 융합한 제어 시스템을 기반으로 고정밀 천공과 자율 제어를 구현하였다. 이를 통해 천공 오차를 기존 0.93 m에서 0.02 m로 97.8% 감소시키고, 생산성을 4.9% 향상시키는 성과를 달성하였으며, 연간 150만 달러 이상의 비용 절감 효과를 보고하였다. 또한 호주 광산 사례에서는 천공 성능이 약 20% 향상되고, 장비당 하루 20시간 이상의 가동률을 기록하는 등 무인 천공 기술의 상용 운용 가능성을 입증하였다.
Epiroc은 ABC(Advanced Boom Control) Total 기능을 통해 디지털 천공 계획에 기반한 자동 천공을 구현하는 것이 특징이다. 체코 석회석 광산 도입 사례에서는 생산성이 약 30% 향상되고 에너지 소비량이 30~50% 절감되었으며, 국내 삼척 광산에서도 무인·자동화 천공 장비 도입 이후 광석 생산량이 10~20% 증가하는 성과가 보고되었다. 이는 단계적 자동화 전략이 실제 광산 환경에서도 유의미한 성과를 창출할 수 있음을 보여준다.
Sandvik은 실시간 매핑 기반 3차원 모델을 활용한 완전 자율 주행 및 천공 기술을 적용하고 있으며, 이를 통해 경제적 편익을 달성하였다. 이는 드론 측량 데이터와 연계된 정밀 천공이 발파 품질과 후속 공정 효율 개선으로 직접 연결될 수 있음을 시사한다.
Komatsu는 배터리 전동식 구동계와 무호스(hoseless) 붐 구조를 핵심 기술로 채택하여, 지하광산 환경에서의 안전성과 작업 환경 개선에 중점을 두고 있다. 해당 기술은 호스 손상으로 인한 가동 중단을 제거하고 소음 및 배출가스를 저감함으로써, 자동화뿐만 아니라 지속가능성 측면에서도 의미 있는 성과를 달성하였다.
Mine Master는 업계에서 드물게 완전 자동 천공이 가능한 자동 천공 시스템을 적용하여, 교대 시간 중에도 자율 천공을 수행할 수 있도록 하였다. 이를 통해 한 명의 작업자가 여러 대의 장비를 동시에 관리할 수 있어 인력 운용 효율성이 크게 향상되었으며, 협소한 지하광산 환경에서도 자동화 기술의 적용 가능성을 확장하였다.
이와 같이 무인 천공 장비는 다양한 광산 환경에 도입되어 천공 정밀도 향상, 생산성 증대, 인력 효율성 개선이라는 정량적 성과를 지속적으로 창출하고 있다. 특히 천공 오차 감소와 천공 품질 향상은 발파 후 2차 파쇄 및 소할발파 작업을 최소화하여 소모품 비용 절감과 공정 단순화로 이어질 수 있다. 더불어 원격·자율 운용을 통해 작업자의 위험 노출을 줄이고, 한 명의 작업자가 다수의 장비를 운용할 수 있는 작업 환경을 구현함으로써 안전성과 경제성을 동시에 확보하는 방향으로 무인 천공 기술이 발전하고 있음을 확인할 수 있다.
제조사별 무인 장약 장비의 기술적 특징 및 도입 효과
Table 2는 4장에서 분석한 주요 무인 장약 장비 제조사별 제어 방식, 대표 시스템, 핵심 기술 요소 및 현장 도입 성과를 종합적으로 정리한 것이다. 무인 장약 장비는 무인 천공 장비에 비해 상대적으로 기술 성숙도가 낮은 분야로 평가되지만, 최근에는 원격제어, 로봇팔, 무선 기폭 기술을 중심으로 현장 적용 사례가 빠르게 증가하고 있다.
Table 2.
Comparison of Representative Unmanned Charging Systems by Manufacturer: Control Strategies, Key Technologies, and Deployment Outcomes
Enaex는 원격조종과 ROS 기반 로봇 장약 기술을 결합한 UG-iTruck®을 통해 장약 공정의 무인화를 선도하고 있다. 칠레 El Teniente 구리광산 도입 사례에서는 100% 원격 장약이 구현되어, 작업자가 위험 구역에 노출되는 인시(person-hours)가 80% 이상 감소하는 성과를 달성하였다. 이는 원격 기반 무인 장약 시스템이 대규모 갱내광산에서도 실질적인 안전 개선 효과를 제공할 수 있음을 보여준다.
Epiroc은 Orica와의 협업을 통해 Avatel™ 시스템을 개발하여, 세계 최초로 무선 전자뇌관(WebGen™)이 통합된 반자율 장약 공정을 상용화하였다. 해당 시스템은 장약 공정에서 가장 위험도가 높은 수동 뇌관 연결 작업을 완전히 제거함으로써, 작업자의 안전성을 획기적으로 향상시켰다. 또한 기계화된 트윈 붐 구조와 직관적인 제어 인터페이스를 통해 한 명의 작업자가 전체 장약 사이클을 수행할 수 있어 인력 운용 효율성 측면에서도 의미 있는 개선 효과를 보였다.
ABB는 산업용 로봇 기술을 장약 공정에 적용한 Automated Robot Charger를 통해, 비전 인식 기반 완전 자동화 장약 시스템을 제시하였다. 기존 장약 트럭에 레트로핏 방식으로 적용 가능하다는 점은 현장 도입 장벽을 낮추는 중요한 장점이며, 스웨덴 Garpenberg 광산의 약 1 km 심도 지하 환경에서 실증을 완료함으로써 기술적 실현 가능성을 입증하였다. 이는 로봇 기반 자동 장약 기술이 실제 광산 조건에서도 적용 가능함을 보여주는 대표적 사례이다.
MacLean은 Auto Explosive Charger를 통해 소할발파 및 2차 파쇄 공정의 무인화를 추진하고 있다. 무선 폭약 장전과 원격제어 기술을 결합하여, 드로포인트 및 통로 막힘 구간과 같은 고위험 작업에서 ‘No boots on ground’ 작업 환경을 구현하였다. 이를 통해 작업자의 직접적인 현장 접근을 제거하고, 안전성과 작업 효율을 동시에 향상시키는 성과를 달성하였다.
Normet은 서보 구동 로봇팔과 머신 비전 기술을 적용한 Charmec Revo®를 통해, 장약 공정의 정밀 자동화를 구현하고 있다. 천공 데이터와 연계된 자동 장약 기능과 직관적인 사용자 인터페이스를 통해 생산성 저하 없이 작업자를 위험 구역에서 분리시키는 데 성공하였으며, 이는 무인 장약 기술이 실질적인 현장 적용 단계로 진입하고 있음을 보여준다.
종합적으로 볼 때, 무인 장약 장비는 원격제어 및 로봇 기반 기술을 통해 장약 공정의 안전성을 크게 향상시키고 있으며, 일부 시스템은 이미 상용 단계에서 정량적 성과를 창출하고 있다. 다만 장비 간 자동화 수준과 기술 접근 방식에는 여전히 차이가 존재하며, 이는 향후 무인 장약 기술이 천공·운반 공정과 동일한 수준의 자율화를 달성하기 위해 해결해야 할 과제로 남아 있다.
무인 천공 및 장약 장비의 기술적 한계와 발전 방향
앞선 사례 분석 결과는 무인 천공 및 장약 기술이 이미 상용화 단계에 진입했음을 보여주지만, 공정별 자동화 성숙도에는 여전히 뚜렷한 차이가 존재한다. 특히 무인 천공 장비는 정밀 제어와 자율 운용 측면에서 비교적 높은 기술 성숙도를 보이는 반면, 무인 장약 장비는 기술적·운영적 제약으로 인해 자동화 수준이 상대적으로 낮은 단계에 머물러 있다. 이러한 불균형은 무인 발파 공정의 완전한 자율화를 제약하는 핵심 요인으로 작용하고 있다.
무인 장약 공정의 자동화가 상대적으로 더딘 주요 원인은 장약 작업이 요구하는 기술적 난이도에 있다. 장약 공정은 발파공 위치와 형상을 정밀하게 인지해야 할 뿐만 아니라, 폭약을 정확한 위치에 원하는 밀도와 양으로 주입해야 하는 고정밀 제어 기술을 필요로 한다. 또한 폭약 취급이라는 특성상 안전 요구 수준이 매우 높아, 로봇팔 제어, 센서 신뢰성, 비상 정지 및 충돌 방지 기술이 동시에 확보되어야 한다. 이러한 복합적인 기술 요구로 인해 장약 공정은 천공, 적재, 운반 공정에 비해 자동화 구현 난이도가 높은 분야로 평가된다(Li et al., 2025).
또한 무인 천공 장비와 무인 장약 장비 간의 공정 연계 미흡 역시 중요한 한계로 지적된다. 무인 천공 장비는 발파공 위치, 방향, 깊이 등 핵심 데이터를 생성하지만, 이러한 정보가 무인 장약 장비로 실시간·무오류로 전달되지 않을 경우 자동 장약의 신뢰성이 크게 저하된다(Normet, 2025). 따라서 천공–장약 공정을 통합한 자율 발파 시스템으로 발전하기 위해서는, 무인 천공 단계에서 생성되는 발파공 데이터의 표준화와 실시간 공유 체계 구축이 필수적이다.
무인 천공 및 장약 기술의 발전을 위해서는 다음과 같은 기술적 방향성이 요구된다. 첫째, 발파공 내부 상태를 정밀하게 인지할 수 있는 고신뢰 센서 기술과 데이터 융합 기술의 고도화가 필요하다. 이는 발파공 붕괴, 편심, 막힘과 같은 불확실 요소를 사전에 감지하고 장약 품질을 안정적으로 유지하는 데 핵심적인 역할을 한다. 둘째, 폭약 주입 위치와 장전 밀도를 정밀하게 제어할 수 있는 고정밀 로봇 제어 기술과 지능형 제어 알고리즘의 개발이 요구된다. 셋째, 무인 천공 장비와 무인 장약 장비 간의 상호 통신과 협력 작업을 가능하게 하는 통합 제어 플랫폼이 구축되어야 한다. 이를 통해 개별 장비의 자동화를 넘어 공정 단위의 자율화로 확장할 수 있다.
향후에는 천공–장약 공정이 단절된 개별 자동화 단계를 넘어, 데이터 기반으로 긴밀히 연계된 자율 발파 시스템(Autonomous Blasting System)으로 발전할 것으로 기대된다. 이러한 통합 자율화는 광산 발파 공정의 안전성, 생산성, 운영 효율을 동시에 향상시키는 핵심 기술로 중요한 역할을 할 것이다.
결 론
본 연구에서는 자율 천공·장약 시스템의 개념을 정립하고, 글로벌 주요 제조사의 무인 천공 및 장약 장비 기술과 국내외 광산 적용 사례를 종합적으로 검토하였다. 이를 통해 제조사별 기술 전략과 시스템 구성의 차이를 비교·분석하고, 무인 발파 장비 도입에 따른 기술적 성과와 운영 효과를 생산성 및 안전성 관점에서 평가하였다.
분석 결과, 각 제조사는 자사 고유의 제어 시스템과 자동화 전략을 기반으로 무인 천공 장비를 개발·상용화하고 있으며, 이를 광산 현장에 적용함으로써 천공 정밀도 향상, 생산성 증대, 운영 비용 절감과 같은 정량적 성과를 달성하고 있는 것으로 나타났다. 특히 천공 작업의 정밀도가 향상될수록 발파 후 파쇄석 입도가 보다 균일해지고, 2차 파쇄 및 소할발파 공정이 감소함에 따라 소모품 사용과 후속 공정 비용이 효과적으로 절감되는 경향이 확인되었다. 이는 무인 천공 기술이 단순한 작업 자동화를 넘어 발파 공정 전반의 효율 개선에 기여하고 있음을 시사한다.
또한 제조사별 무인 장약 장비의 기술적 특징과 도입 효과를 분석한 결과, 무인 장약 시스템은 공통적으로 작업자를 고위험 작업 구역으로부터 분리하는 방향으로 발전해 왔으며, 안전성 확보 측면에서 다른 무인 장비 대비 매우 높은 효과를 보이는 것으로 나타났다. 원격제어, 로봇팔 기반 자동 장약, 무선 전자뇌관 기술의 적용을 통해 작업자의 위험 노출이 획기적으로 감소하였으며, 일부 사례에서는 이미 100% 원격 장약이 구현되는 등 무인 장약 기술이 상용 단계에 진입했음을 확인할 수 있었다.
무인 천공 및 장약 공정 모두에서 생산성과 안전성 측면의 정량적 성과가 확인됨에 따라, 무인 발파 기술은 광산 무인화·자동화를 본격적으로 견인하는 핵심 기술로 평가된다. 특히 천공과 장약 공정이 개별적으로 자동화되는 단계를 넘어, 발파공 데이터의 실시간 공유와 공정 간 연계를 기반으로 하나의 통합 워크플로우로 발전할 가능성이 높다.
향후에는 무인 천공 및 장약 장비가 통합된 자율 발파 시스템으로 고도화되면서, 천공–장약–적재–운반 전 공정에서 무인 장비 간 데이터 연동과 실시간 제어 기술이 결합될 것으로 기대된다. 이러한 통합 자동화는 광산 작업의 효율성과 시스템 안전성을 동시에 향상시키는 기반이 될 뿐만 아니라, 궁극적으로 스마트 마이닝 구현을 위한 핵심 기술적 토대로 자리매김할 것으로 전망된다.
