

시추 방향제어를 위한 시추중 측정 및 시추중 검층
시추중 측정(MWD) 시스템의 3가지 핵심 요소 기술
시추중 검층(LWD)
시추중 검층(LWD) 발전 과정
Schlumberger사 시추중 측정 및 실시간 시추중 검층 장비 현황
시추중 측정(Measurement while drilling; MWD)
시추중 저류층 지도화(Reservoir Mapping While Drilling)
시추중 석유암석물리 분석(Petrophysics While Drilling)
시추중 지질 분석(Geology While Drilling)
시추중 암석역학 분석(Geomechanics While Drilling)
시추중 지구물리 분석(Geophysics While Drilling)
시추중 저류층 분석(Reservoir Engineering While Drilling)
실시간 시추 및 검층 적용 해외 사례
호주 Coniston 해안가: 저류층 전자기 구조 영상화를 통한 예상 석유 회수율 증가
중동 해안가: 고온 고압 환경의 탄산염 저류층 시추
중국 남부지방: 암석역학적 자료 분석을 통한 시추 위험도 감소
시추중 비트에서 측정(Measurements at the bit)
시추방향제어
비트에서 전기비저항 측정(Resistivity at the bit; RAB)
결 론
서 론
시추 중에 방향을 제어하여 원하는 목표에 시추 비트가 도달할 수 있도록 하는 방향제어 시추(geo-steering drilling) 기술이 발전하면서, 셰일가스(shale gas) 개발 등의 비전통 탄화수소 저류층 개발의 경제성 확보뿐만 아니라 전통적 저류층의 개발에서의 생산량을 극대화 할 수 있게 되었다(Adolph et al., 2005; Barber et al., 1999; Bargach et al., 1997; Beer et al., 2010; Bonner et al., 1992). 즉, 방향제어 시추 시 시추제어를 위해서 필요한 정보나 저류층 특성화를 위해 수행하는 시추중 측정(measurement while drilling; MWD)이나 시추중 검층(logging while drilling; LWD) 자료를 실시간으로 해석함으로써 저류층의 경계와 유체의 접촉을 실시간으로 파악하고 이 정보를 사용하여 유정의 배치를 최적화 하면 유정 운영자는 생산량을 늘이고 시추가 계획되지 않은 방향으로 진행될 확률을 줄이며 유정의 안정성을 극대화할 수 있다.
자원탐사 초기에는 수직 시추를 통해 목표 심도까지 도달하는 것에 그쳤으나 방향 제어 시추 기술이 발전함에 따라 원하는 방향과 궤적을 따라 시추하는 기하학적 방향제어(geometrical steering) 시추로 시추 목표가 바뀌었다. 이후 한걸음 더 나아가 생산성 극대화를 위해 최적의 시추 방향을 찾아가는 지질학적 방향제어(geological steering) 시추로 바뀌었다. 수직시추에서 현재 시추 위치로부터 최종 목적 심도까지 수직으로 시추하는 것에만 초점을 맞추었던 기하학적 고려는 직선의 기하학에 기초했다면, 기하학적 방향제어 시추에서는 리그에서의 깊이, 거리, 방향 등 3차원인 기하학으로 확장되었다. 지질학적 방향제어 시추는 3차원 기하학에 기초하여 단순하게 원하는 시추점들을 통과하기 보다는 시추중 지질 분석을 기반으로 가장 큰 효율을 낼 수 있는 최적의 유정 배치를 찾아가는 데 이용한다.
기하학적 방향제어 시추를 위해서는 시추 경사와 방위각의 측정에 기초하여, 지표 탐사 등을 통해 사전에 계획한 시추 궤적을 따라 정확하게 시추할 수 있도록 하기 위해 시추중 측정을 수행한다. 지질학적 시추중 측정뿐만 아니라 시추 비트 주변 지층에 대한 정보를 얻기 위해 자연감마선검층, 전기비저항검층, 중성자검층, 밀도검층 혹은 음파검층 등을 수행하여 지층평가(formation evaluation)를 수행하여 최적 시추 방향을 결정할 수 있어야 한다.
최근 실시간으로 시추 방향 결정을 위해 검층 자료를 이용한다는 점에서 시추중 측정과 시추중 검층의 경계가 희미해졌기 때문에(Bonner et al., 1992) 이 둘을 구분하기 보다는 ‘시추중 측정 및 검층(MWD/LWD)’로 통칭하는 경향이 있다. 그러나 장비 관점에서 시추중 측정 장비는 시추방향제어를 위한 실시간 측정뿐만 아니라 시추중 검층 자료의 실시간 원격 송신을 위한 원격자료 송신 기술의 향상에도 초점을 두고 있다는 점을 고려하면 시추중 측정과 시추중 검층은 기술적으로 매우 큰 차이가 있다고 할 수 있다.
산업 현장에서는 시추 비트와 시추중 검층 센서 사이의 거리를 줄여 측정을 하는 구역과 시추가 진행되는 구역에서의 시간 및 공간의 차이를 최소로 하여 방향제어를 위한 자료 해석 시간을 단축하는 것도 중요하게 대두되고 있다. 즉, 시추중 측정 및 검층은 시추 파이프(drill string) 내에서, 최전방 시추 파이프의 뒤쪽에 연결되기 때문에 시추 비트로부터 일정 거리만큼 떨어진 위치에서 측정 및 검층이 이루어진다. 시추 비트와 측정 센서의 간격이 30 m까지도 벌어질 수 있어서 시추 위치에 대한 시간 및 공간적 자료 지연이 발생한다. 이를 해결하기 위해 최근 드릴 비트에 측정 센서를 장착하여 시추방향 제어에 필요한 정보를 보다 효율적으로 제공할 수 있는 기술로, 측정 센서를 비트에 위치시켜 측정하는 방법(measurements at bit; MAB)도 개발되었다(Bonner et al., 1993).
이 기술보고에서는 먼저 기하학적 시추 제어를 위한 시추중 측정과 지질학적 시추제어를 위한 시추중 검층과의 차이점에 대해서 간략히 논의한 뒤, 시추중 측정 시스템의 핵심 구성 요소인 전력시스템, 원격통신 시스템(telemetry) 및 기하학적 시추방향제어를 위한 방향 센서 시스템에 대해 자세히 알아보고자 한다. 물리검층 서비스를 제공하는 해외 물리탐사 기업으로는 Schlumberger, Halliburton, Baker Hughes사 등 다양한 기업들이 있으며 그중 가장 대표적인 Schlumberger사는 여러 물리검층 서비스를 제공하는 기업 중에서도 최신 기술을 선도하고 있으며 제공하고 있는 각종 검층 장비들에 대한 설명과 해외 기술 적용 사례까지 잘 정리해놓았다. 따라서 이 기술보고에서는 시추중 검층법의 발전과정과 실시간 시추중 검층법에 대하여 Baker Hughes사에서 제공하고 있는 시추중 측정 및 검층 서비스의 최신 기술현황과 함께 이러한 장비들을 활용한 해외 사례들을 정리하고자 한다. 마지막으로 드릴 비트와의 공간적 이격으로 인해 발생하는 시추중 측정 및 검층의 한계를 극복하기 위해 개발된 비트에서의 측정(measurements at the bit, MAB)법에 대한 특징에 대해서 살펴보고자 한다.
시추 방향제어를 위한 시추중 측정 및 시추중 검층
시추중 측정(MWD)에서는 시추중인 장비의 위치를 확인하고 계획한 궤도를 제대로 따라가고 있는지 확인하기 위해 실시간으로 비트의 위치와 굴진방향의 경사와 방위각과 함께 저류층 압력과 온도, 장비면 방향(tool face) 등의 자료를 측정하여 기하학적 방향제어(geometric geo-steering)를 하는데 이용된다. 전통적으로 시추중 측정이란 시추 위치에서 필요한 자료를 측정하고 이를 실시간으로 지표로 보내는 원격 측정이라고 할 수 있다(원격 측정이라는 뜻의 “telemetry”는 시추중 측정의 특징 그 자체를 설명하는 용어일 것이나 시추중 측정에서 여러 종류의 측정이 이루어지고, 이를 실시간으로 지표로 원격 송신하는 것이 측정만큼 중요시되면서 시추 중 자료를 송신하는 기술 즉 “원격송신”의 의미에 더 가깝게 이용되고 있다). 시추 위치에서 측정 자료를 지표로 어느 정도의 용량을 실시간으로 보낼 수 있느냐 하는 방법 즉, 원격 송신(telemetry) 기술은 시추중 측정 기술의 발전에 가장 중요한 기술 요소 중의 하나로 이에 대해서는 부록 A에서 보다 자세히 설명한다.
시추중에는 방향제어를 위한 측정 외에도 저류층의 전기비저항, 공극률 등의 지층 평가 혹은 저류층 특성화를 위한 저류층 매개변수 측정 등을 위해 시추중 검층(LWD)도 수행하게 된다. 종래의 시추중 검층은 실시간 검층 자료의 획득 보다는 메모리 검층 자료 획득에 목적이 있었다. 이러한 시추중 검층 자료는 시추이수가 침투하기 전에 지층의 물성을 측정할 수 있다는 장점이 있으며, 수직에서 많이 어긋나게 시추된 시추공이나 수평시추공처럼 유선검층(wireline logging) 수행이 힘든 시추공에서 검층 자료를 얻을 수 있는 장점이 있다.
이와 같은 시추중 측정 및 검층 기술은 셰일가스(shale gas)나 석탄층가스(coalbed methane: CBM) 등을 상업적으로 개발하기 위해 방향성 시추에 필요한 시추방향제어(geosteering)가 매우 중요해지면서 기술적 발전이 급속하게 이루어졌다. 최근 시추중 측정의 발전으로 원격송신 기술도 크게 발전하면서 시추중 검층 자료도 실시간으로 확보할 수 있게 되어 실시간 시추중 검층(real-time LWD)도 가능해졌다. 실시간 시추중 검층이 가능하기 이전의 시추중 검층 자료는 일반적으로 측정 장비 센서에 내장되어 있는 메모리에 저장되었다가 시추를 마치거나 장비를 지표로 꺼낼 때 검층 자료(이하 ‘메모리 검층 자료’)를 확보할 수 있었다. 시추중 검층 자료를 실시간으로 확보할 수 있게 되면서 실시간 검층자료를 비롯하여 보다 많은 자료에 기초한 지질학적 시추방향제어가 가능하게 되었다. 지질학적 시추방향제어를 통하여 생산성을 극대화 할 수 있는 생산정 시추뿐만 아니라 시추 위험에 대한 관리에도 유리하므로 시추 효율성을 높여 탐사나 개발 비용을 줄일 수 있다는 점이 주목할 만하다. 시추중 검층 자료를 실시간으로 이용하여 해석하면, 시추 시 시추정이 저류층 내에서 가장 생산성이 좋은 위치를 관통하거나 암염돔과 같이 시추 시 문제가 될 수 있는 위험 구역을 사전에 파악하여 위험을 피할 수도 있게 되었다. 또한 더욱 효율적인 시추방향제어를 위해 시추중 측정 장비에 기존의 기하학적 방향제어 측정뿐만 아니라 지질학적 방향제어(geological geo-steering)까지 가능하도록 자연감마선검층이나 전기비저항검층 등 간단한 검층 센서까지 포함하고 있다(Fig. 1). 따라서 최근에는 실시간 시추중 검층자료까지 시추방향제어에 적용 하면서 시추중 측정과 시추중 검층의 경계가 모호해지고 있으며 실제 검층 서비스를 제공하는 기업들도 시추중 측정과 검층을 동시에 할 수 있는 장비들을 많이 개발하고 있다(Schlumberger, 2016; Halliburton. 2018).
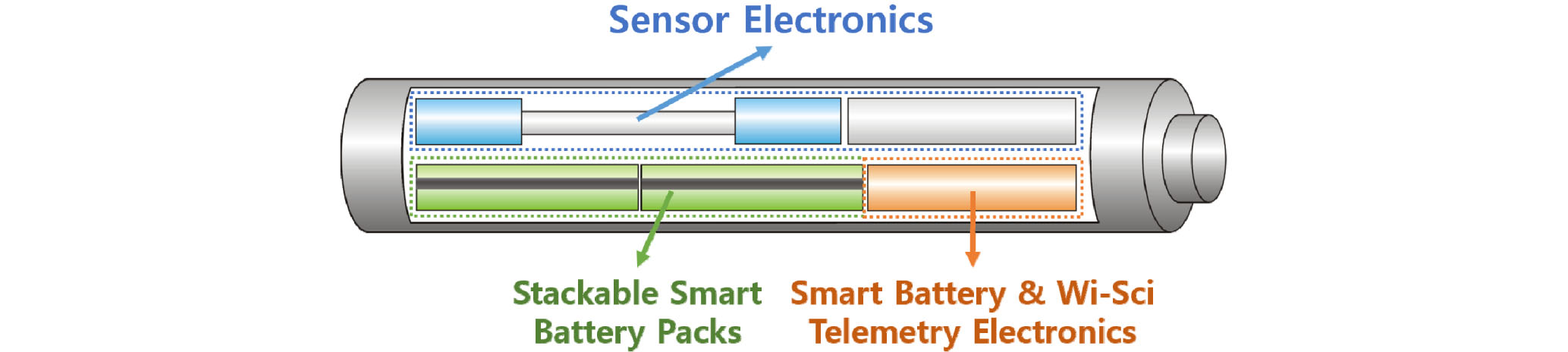
시추중 측정(MWD) 시스템의 3가지 핵심 요소 기술
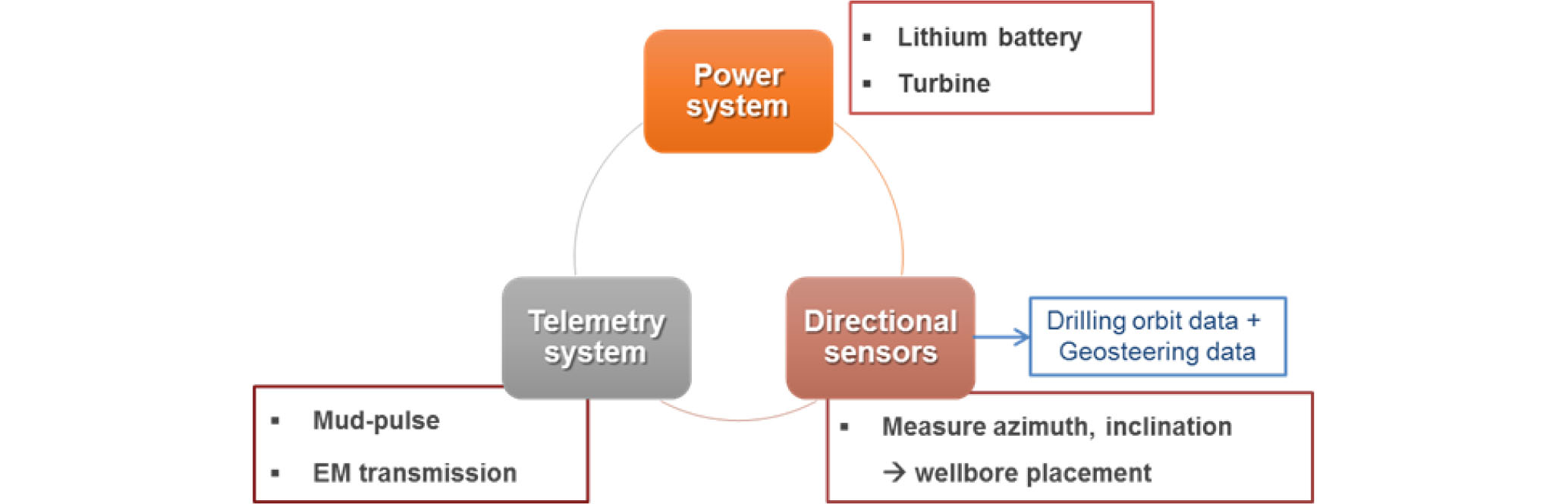
시추중 측정은 수평정이나 방향성 시추 등을 안정적이면서 효율적으로 수행하기 위해 필요한 시추위치에 대한 기하학적 정보(geometric information) 등을 제공한다. 즉, 시추를 수행하면서 시추공 굴진 방향의 경사나 방위, 시추공 압력뿐만 아니라 시추 비트에 걸리는 하중(weight on bit, WOB), 진동이나 충격 등의 정보를 실시간으로 측정하고 측정 자료를 지상으로 전달한다. 이러한 시추방향제어(geosteering)를 위한 시추중 측정 시스템의 핵심 요소 기술은 측정 장비의 작동을 위한 전력(부록 B 참조), 자료를 지표에 있는 지상 측정 시스템으로 송신하기 위한 원격통신(telemetry; 부록 A 참조), 그리고 방향측정 센서, 하중측정 센서 등(부록 C 참조) 3가지로 분류할 수 있다(PetroWiki, 2016)(Fig. 2). 최근 장비의 시추중 측정에는 이러한 기하학적 정보뿐만 아니라 시추 궤적 등을 보다 능동적으로 결정하기 위해 시추중 측정 장비에 자연감마산검층 장비가 내장되어 있는 경우가 많이 있으며 몇몇 시추중 측정 장비에서는 전기비저항검층 장비까지 포함하기도 한다.
시추중 검층(LWD)
앞서 살펴본 시추중 측정의 3가지 요소 기술은 기하학적 시추방향제어의 핵심 정보가 된다. 한편 최근에는 생산성 극대화를 위해 특정 지층을 따라 시추하고자 하는 지질학적 방향제어가 점점 중요 시 되고 있고 이를 위해 매질의 특성을 파악하기 위한 간단한 검층(자연감마선검층이나 전기비저항검층 등) 센서를 시추중 측정 장비에 설치하는 경우가 있다. 즉, 시추중 측정의 방향 센서는 정확한 시추 위치의 확보에 기초하여 시추 궤적을 보다 정확히 파악하는 정보제공에 초점이 있다면, 간단한 검층 장비를 추가한 확장된 측정에서는 능동적 방향 결정을 위한 주변 저류층의 정보까지 포함하는 의미로 받아들일 수도 있다.
시추중 검층은 시추중 측정 원격통신 기술의 발달에 힘입어 시추중 측정 자료를 실시간으로 모두 송신할 수 있게 되었는데, 시추가 끝난 뒤 검층 자료를 획득 할 수 있었던 메모리 검층 자료 획득에서 시추중 검층 장비가 측정과 동시에 실시간 검층 자료를 확보할 수 있게 됨으로써 이를 시추방향제어에 이용할 수 있게 되었다. 즉 원거리 통신 기술과 실시간 검층 자료 해석 기술의 발달로 시추중 측정과 시추중 검층의 경계를 명확히 구분하기가 점점 어려워지고 있다. 이로 인해 Schlumberger사에서는 ‘실시간 측정 및 검층(real-time MWD/LWD)’을 하나의 용어(MWD/LWD)로 사용하고 있다. Schlumberger사는 검층 기술을 선도하는 세계적 기업 중 하나이기 때문에 이 장에서는 이러한 Schlumberger사의 장비를 중심으로 2000년대까지의 시추중 검층의 발전 과정에 대해서 간략히 소개한다.
시추중 검층(LWD) 발전 과정
시추중 검층(LWD)는 지난 몇 십 년 동안 많은 발전을 거듭해왔다. 시추중 검층이라는 개념이 처음 도입된 1980년대(1988~1992)에는 시추 경사와 지층 평가에 필요한 자료 등 기본적인 검층만을 수행하였다(Bargach et al., 1997). 또한 주로 주변 시추정들과 연결시켜 층서 구조를 파악하고 기본적인 저류층 평가하는 데 이용되었다. 이 시기에는 기술 개발의 초창기였기 때문에 얇은 두께이거나 파쇄대가 많이 지층 등 복잡한 지층의 저류층들은 실제로는 개발 가치가 있지만 저평가 되어 개발에서 제외 되는 경우도 많았다.
1990년 중반에는 시추중 측정에서는 정확한 시추방향제어(geosteering)를 통한 저류층 생산 최적화를 위해 방위각(azimuthal) 측정 자료 등을 실시간으로 송신하던 시기로, 시추중 검층 2세대(1993~1996)에 속한다(Bargach et al., 1997). LWD에서는 나공 영상화(borehole imaging), 정모델링 프로그램 등도 수행하기 시작하였으나 여전히 지층 분석에 대한 자료는 검층이 끝난 후에 확보하여 분석할 수 있었다.
시추중 검층 3세대(1997~2000)인 1990년대 후반부터는 시추중 검층 자료도 실시간으로 분석하기 시작하게 되었다(Bargach et al., 1997). 예로 Schlumberger의 종합 시추중 검층 장비인 VISION은 원격통신 기능이 많이 향상되어, 실시간으로 시추 방향을 결정하는 데 도움을 주었다. 이러한 실시간 시추중 검층 장비들은 목적과 측정 방법에 따라 더욱 세분화되어 효율적으로 지층을 분석하고 최적화된 시추정 배치를 위한 기본 자료를 이용할 수 있게 되었다.
Schlumberger사 시추중 측정 및 실시간 시추중 검층 장비 현황
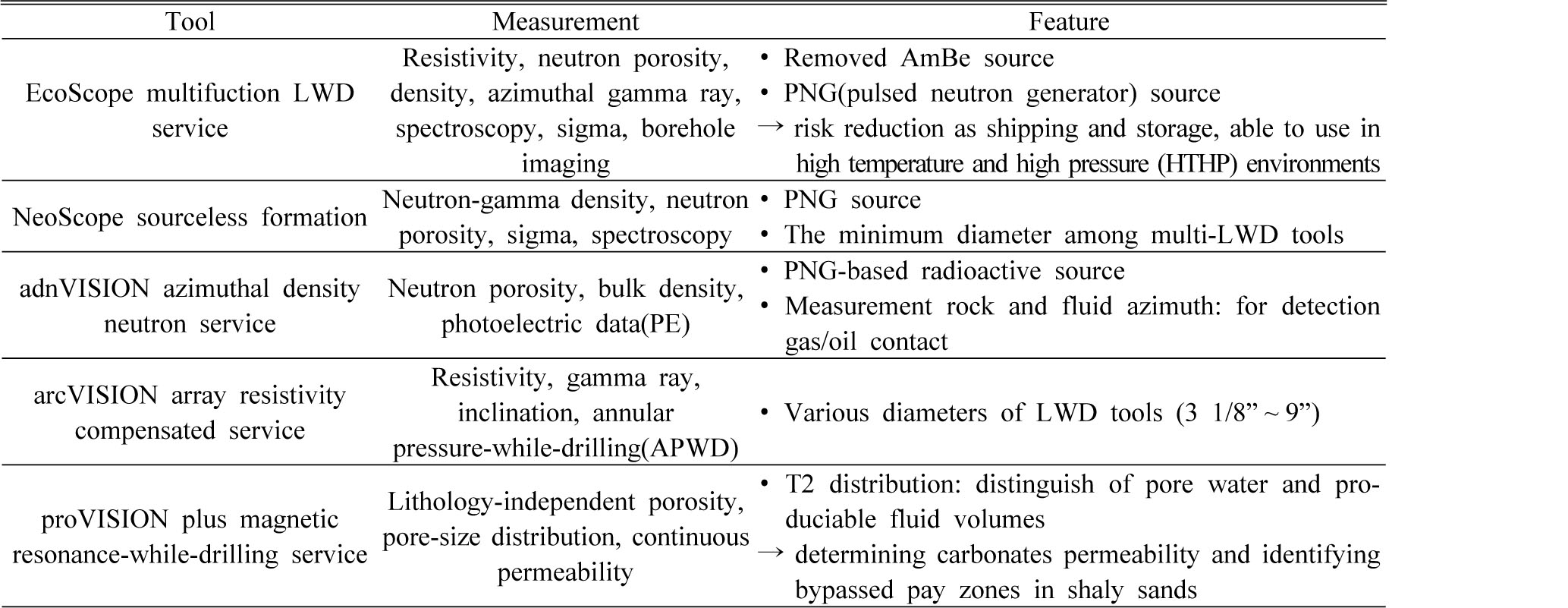
시추중 측정의 원격 통신 기술의 발전으로 검층자료도 실시간으로 통신이 가능해졌으며(Bonner et al., 1992) 이로 인해 실시간으로 지층을 분석하고 지질학적 제어를 할 수 있게 되었다. 시추중 검층에서는 유선 물리검층에서 측정하는 검층 즉, 자연감마선, 중성자, 밀도, 음파, 전기비저항, 자기공명검층 등이 모두 적용될 수 있다. Schlumberger사는 실시간 시추중 측정 및 검층에 있어 그 목적에 따라 총 6가지로 분류하고 있으며 각각의 범주에는 여러 물리 검층 기법들 중 일부를 적용하고 있다(Fig. 3; Schlumberger, 2016).
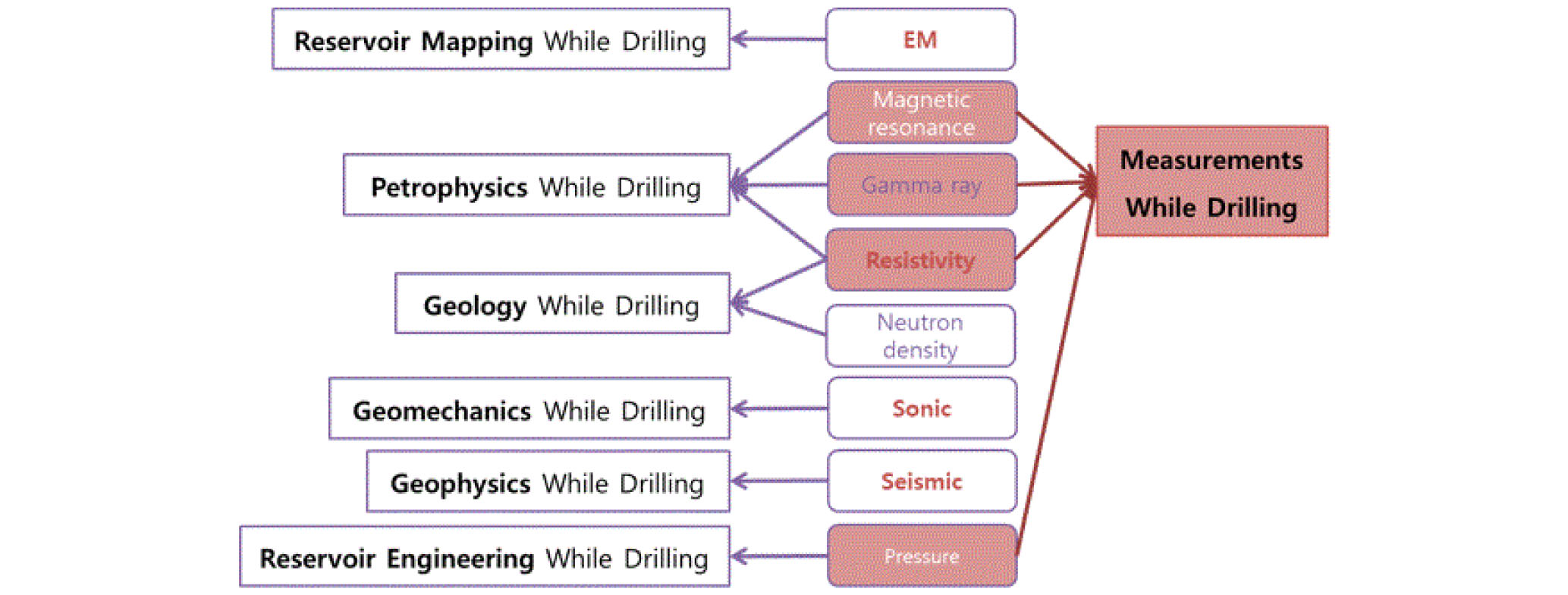
전기 ‧ 전자 검층을 통해 다수의 지층 경계층들과 유체 경계면을 알아내어 시추공의 생산정 위치 최적화 및 저류층 구조 파악에 효과적인 ‘시추중 저류층 지도화(Reservoir mapping)’, 암석학적 성질, 공극률, 포화도, 투수율 등 다양한 저류층 특성 분석 자료를 제공하는 ‘시추중 석유암석물리 분석(Petrophysics)’, 밀도검층, 전기비저항 영상화검층을 통해 지층 구조와 단층 및 균열을 파악하는 ‘시추중 지질학 분석(Geology)’로 분류하였다. 이 외의 ‘시추중 지질역학 분석(Geomechanics)’, ‘시추중 물리탐사 분석(Geophysics)’, ‘시추중 저류층 분석(Reservoir Engineering)’은 각각 음파, 탄성파, 압력 측정을 통한 지층 구조 파악, 저류층 평가 및 지층 안정성을 측정한다. 특히 ‘시추중 측정(MWD)’에서는 방향센서 측정 이외에도 지질학적 정보 파악하기 위해 자연감마선검층을 측정하는 것이 일반적이지만 Schlumberger사의 시추중 측정 장비에서는 자연감마선검층 외에도 전기비저항검층이나 자기공명검층까지 고려하고 있음을 알 수 있다.
시추중 측정(Measurement while drilling; MWD)
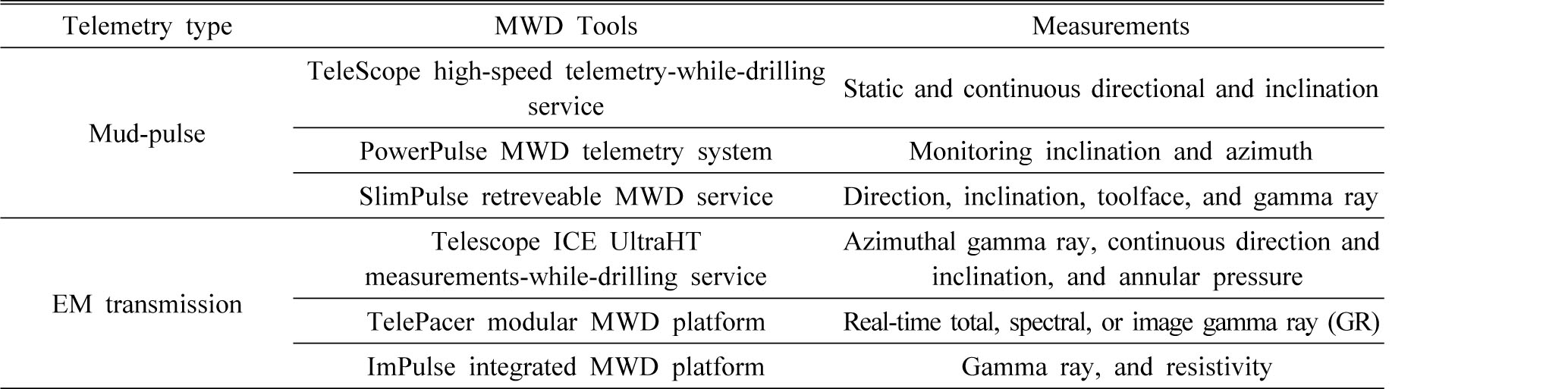
Schlumberger사의 시추중 측정(MWD) 장비는 사용하는 원격통신 시스템 구분에 있어서 크게 이수 펄스를 이용하는 장비와 전자기 신호를 이용하는 장비가 있다(Schlumberger, 2016)(Table 1). 이들은 각각 특수한 저류층 환경에서도 기능할 수 있도록 제작되었는데 Telescope ICE UltraHT Measurements -While-Drilling Service 같은 경우는 최대 200°C(392 °F)에서도 견딜 수 있다. 또한 기본적인 방향제어 뿐만 아니라 실시간 물성 자료 분석을 통해 비전통 저류층 검층에 적합하도록 자연감마선검층이나 전기비저항 측정 센서가 부착된 시추중 측정 장비도 있다.
시추중 저류층 지도화(Reservoir Mapping While Drilling)
일반적인 유정 검층의 경우 해상도가 시추공으로부터 몇 m 정도밖에 되지 않아 저류층의 전체적인 구조를 보는데 한계가 있다. 저류층 규모의 영상화를 통해 다수의 지층 경계층들과 유체 경계면을 알아냄으로써 시추공 위치를 최적화시키고 저류층 구조의 노출을 극대화 시키게 된다(Schlumberger, 2016)(Table 2). GeoSphere 서비스는 심부에서 경사시추 시 전기전자탐사를 하게 되며 가장 큰 특징은 시추 공경으로부터 30 m(100 ft) 범위까지 영상화가 가능하다는 점이다. 넓은 영상 범위를 이용하여 저류층의 전기적 지질구조 경계층을 구분하고 서로 다른 유체 접촉면도 탐지함으로써 저류층 범위를 최적화시켜 알맞은 시추공의 위치를 효율적으로 찾을 수 있도록 해준다.

시추중 석유암석물리 분석(Petrophysics While Drilling)
자연감마선, 전기비저항, 밀도, 중성자 공극률, 중성자-감마, 자기공명, 음파 속도와 같은 다양한 측정 방법을 동원하여 지층 평가 및 시추 방향 설정에 필요한 정보들을 실시간으로 제공하여 저류층의 양적 평가를 가능하게 한다(Schlumberger, 2016)(Table 3). 특히 Schlumberger에서는 일반적으로 시추중 검층에서 사용하는 화학 선원 AmBe를 사용하지 않고 대신 독자적으로 개발한 중성자 선원인 중성자발생장치(PNG: pulsed neutron generator)를 장착하여 사용하고 있다. 시추중 측정 터빈을 돌리면 전원이 공급되고 중성자발생장치는 별도의 중성자선원 탑재 없이 자체적으로 지층과 반응하는 약 14 MeV 에너지의 중성자를 발생시킨다. 중성자선원발생장치는 AmBe 화학 선원 대신 모든 측정들의 송신원 역할을 하며 운송 및 보관 시 화학 소스의 위험부담을 제거하고 화학적 송신원을 사용하기 어려운 고온고압의 환경에서 매우 유용하게 사용된다.
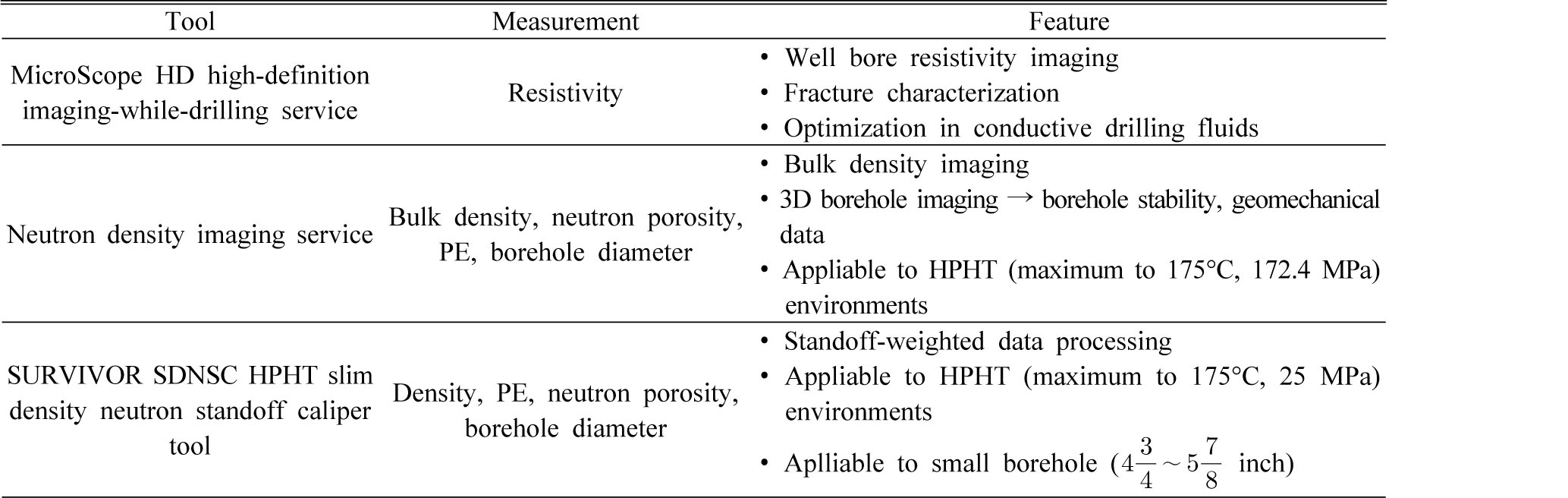
시추중 지질 분석(Geology While Drilling)
지층 구조, 단층 및 파쇄대를 알아내는 작업은 시추할 때 발생할 수 있는 문제점을 예방할 수 있으며 시추공 완결(completion) 작업에 대한 계획을 세울 때도 중요하다. 이를 위해 시추공 벽면에 단층 및 파쇄대를 탐지하거나 시추공경의 크기를 측정하여 엔지니어가 방향제어를 위한 결정을 하는 데 도움을 준다(Schlumberger, 2016)(Table 4). 시추공 벽면에 단층이나 파쇄대가 있을 경우, 균열로 인해 생긴 틈으로 전기전도성이 있는 시추 이수가 스며들어 전기비저항이 낮게 나타나는데 수직 해상도 0.4 inch의 고해상도 이미지로 매우 세밀한 파쇄대까지 발견할 수 있다. 파쇄대 종류와 형태, 밀도, 분포까지 분석하기 때문에 파쇄대 지역을 피하여 시추공 완결이나 천공(perforation)할 적절한 위치를 정하는 데 도움을 준다. 체적밀도, 중성자 공극률, 광전자 지수(photoelectric index, PE), 공경검층자료 등을 이용하여 시추 공벽을 영상화하거나 측정한 전기비저항 구조를 시각화하여 시추공과 교차하는 균열의 특성 분석 등을 수행한다.
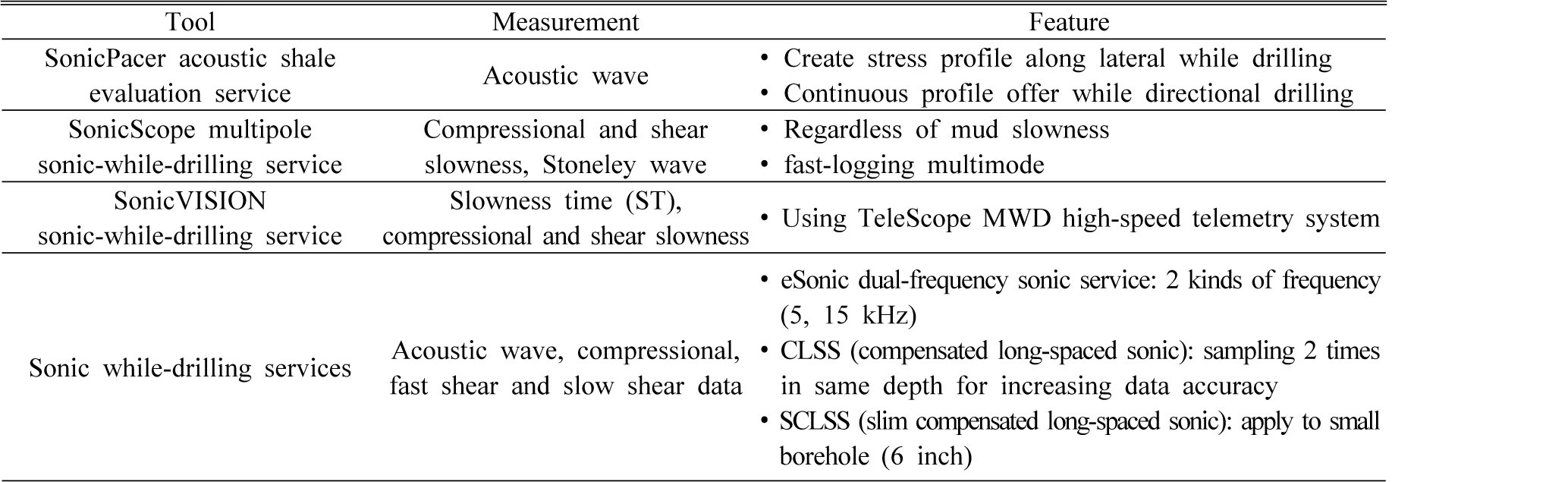
시추중 암석역학 분석(Geomechanics While Drilling)
알맞은 케이싱 위치 선정을 위한 데이터를 얻기 위해서 실시간으로 압력, S파 속도와 스톤리파(표면파)를 음파검층으로 측정한다(Schlumberger, 2016)(Table 5). 이를 이용하여 지층 평가 및 시멘트 양을 평가하며 적절한 시추 이수 비중과 천공 시 시멘팅 최상부(top-of-cement)에 대한 정보도 얻을 수 있다. 기본적인 음파 측정으로 알 수 있는 것과 더불어 최적의 이수 비중 선정, 온도나 염도 영향에 무관하게 공극압 예측, 시멘팅 최상부 확인, 암석역학적 성질 이해, 가스 주입이나 지층 가스 확인 등을 할 수 있게 해준다. 초음파검층 장비의 직경을 다양화 하여 시추 공경에 최적화된 장비를 사용할 수 있도록 하였다.
시추중 지구물리 분석(Geophysics While Drilling)
탄성파 자료로 시간-깊이-속도 정보를 얻음으로써 궤도 조정, 케이싱 및 코어링 깊이, 이수 비중 최적화, 시추 목표물 깊이 예측 및 잠재적 위험 지역을 피하는 데 사용한다(Schlumberger, 2016)(Table 6). 센서가 위치한 곳보다 더 깊은 지층에 대한 정보도 얻을 수 있기 때문에 실시간으로 제공되는 수직 탄성파 자료를 바탕으로 시추 타겟 위치를 미리 예측하고 궤도를 조정하는 데 이용할 수 있다.

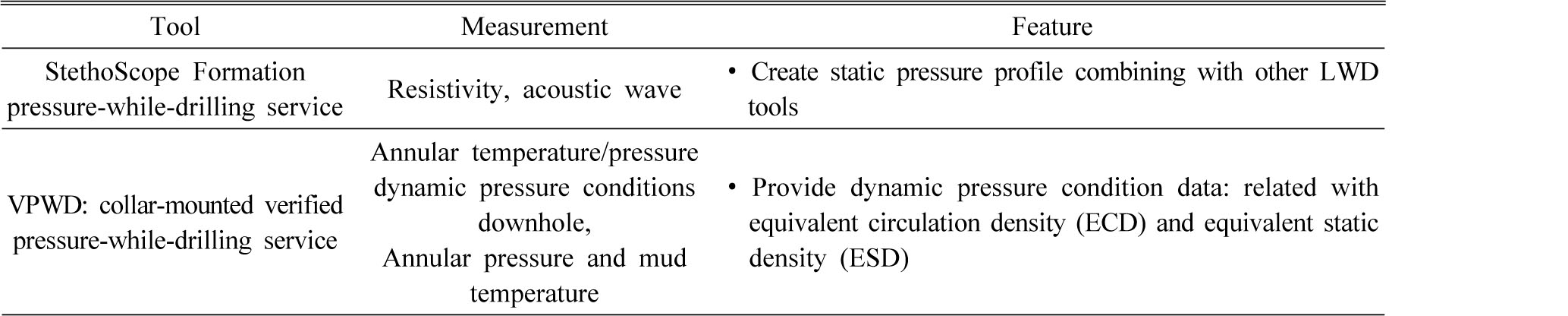
시추중 저류층 분석(Reservoir Engineering While Drilling)
지층의 압력을 측정하여 정확한 지층 평가 및 방향제어를 위한 공극압을 분석한다(Schlumberger, 2016). 이는 위험성이 높은 압력이 약한 지층을 피하고 방향성 시추시 위험한 지역을 피할 수 있도록 도와준다. 또한, 공급압 자료를 이용하여 시추 이수 비중을 최적화 하거나 적절한 케이싱 위치를 선정하는 데 도움을 줄 수 있다. 전기비저항과 음파 검층을 이용하여 시추 시 지층압력을 측정하고 시추공 주변의 공급압을 예측할 수 있도록 해준다. StethoScope 서비스는 다른 시추중 검층 툴과 결합하여 정적 상태(static)의 공급압에 대한 자료를 구성하고 최적화된 저류층 압력 모델을 만들 수 있으며 VPWD 서비스는 동적(dynamic) 압력조건에 대한 정보를 제공한다. 또한 VPWD 서비스는 annular의 온도, 압력 그리고 이수의 온도도 측정할 수 있다(Table 7).
실시간 시추 및 검층 적용 해외 사례
Schlumberger사는 다양한 실시간 시추 및 검층 장비들을 개발하였으며 이를 전 세계의 다양한 저류층 탐사에 활용하고 있다. 이 장에서는 위에서 소개한 장비들을 이용하여 실제 저류층 탐사 시추에 활용한 사례들을 소개하고자 한다.
호주 Coniston 해안가: 저류층 전자기 구조 영상화를 통한 예상 석유 회수율 증가
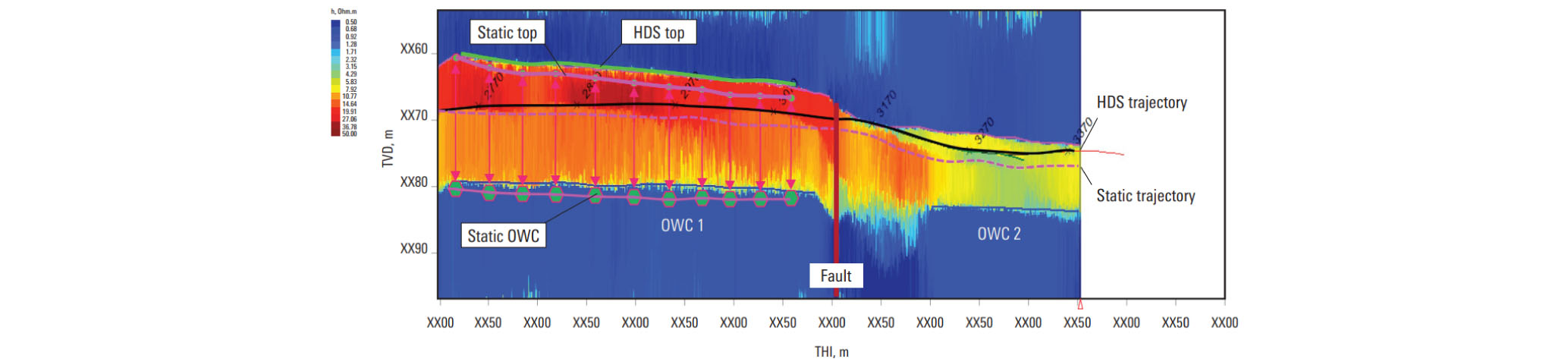
Apache Energy사는 호주 Coniston 해안가에 15개 시추공을 뚫고자 하였는데 현장의 단층 구조가 복잡하게 얽혀있었으며 이러한 단층들이 사암층에 있는 탄화수소 층을 양분한 형태였다(Schlumberger, 2015). 이 현장은 복잡하게 이루어진 단층 구조 때문에 15%~20% 정도의 낮은 석유 회수율을 보이고 있었다. 저류층 범위를 확장하여 회수율을 높이고자 전자기 송신원을 통해 직경 30 m 수준의 전기적 지질 구조를 밝히는 GeoSphere을 이용하여 지질 및 탄성파 모델을 발전시키고 저류층의 경계면, OWC(oil-water contact)를 조사해 저류층 구조를 분석하였다(Fig. 4). 지속적으로 OWC 구조를 영상화 시키면서 시추공 최하단에서 19 m 떨어진 곳에 OWC가 존재하며 추가 석유 매장 저류층을 확인할 수 있었다. 이를 통해 저류층을 3,400 m 확장할 수 있었으며 예상 석유 회수율은 11% 증가하였다.
중동 해안가: 고온 고압 환경의 탄산염 저류층 시추
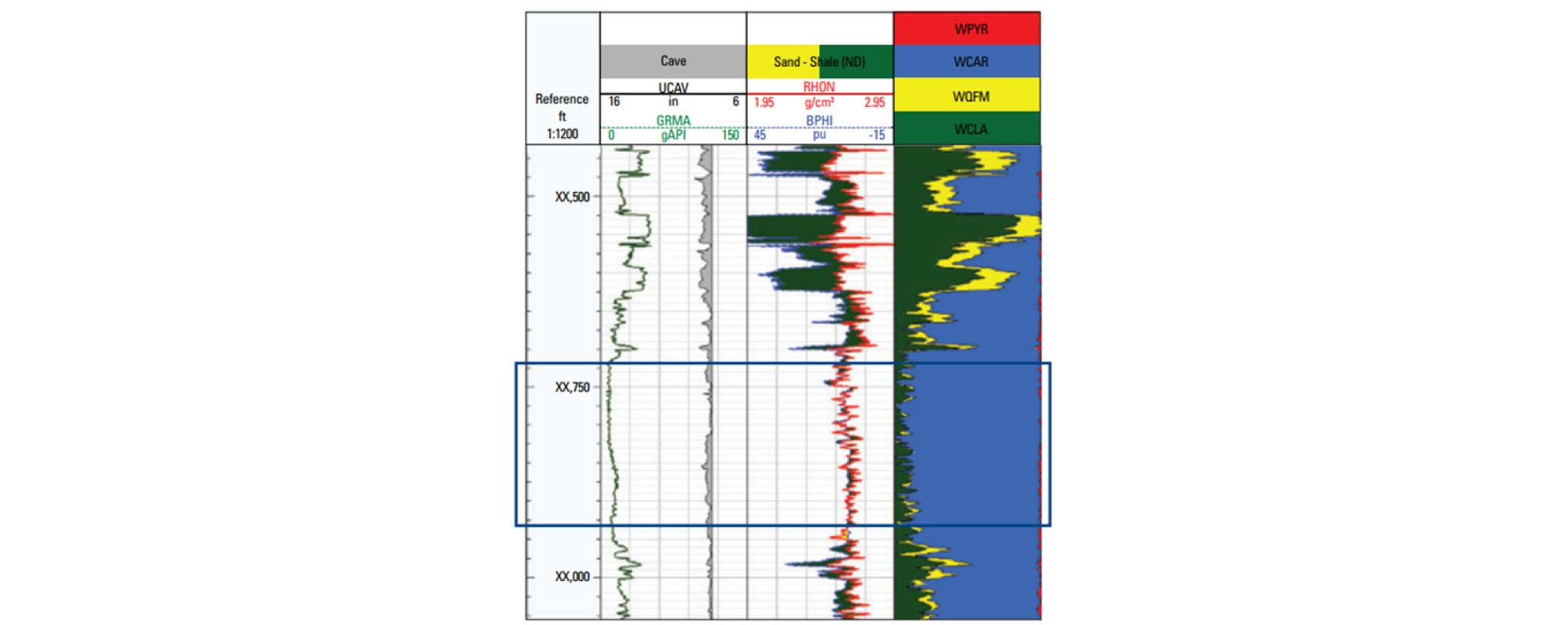
중동 한 해안가에 충적 분지로 인한 밀도 높은 탄산염 저류층에 탐사정 시추를 하고자 하였다(Schlumberger, 2012). 활발한 지각 변동의 역사가 있어 분지는 매우 고온 고압 환경으로 화학 선원인 AmBe 사용에 높았으므로 중성자발생장치(PNG: pulsed neutron generator)를 사용하는 NeoScope Sourceless Service가 채택되었다. NeoScope 서비스는 자연감마선, 전기비저항, 중성자 공극률, 중성자-감마 측정 등을 이용하여 저류층 특성 분석을 하였으며 정확한 수포화도 분포도를 얻을 수 있었다(Fig. 5). 불확실한 지대에 대한 분석을 해나가면서 탄화수소구역을 확실히 정의할 수 있었으며, 비트와 가까운 곳에서 측정한 덕분에 시추 경로를 수정하는 경우가 줄어들면서 USD 500,000를 절약할 수 있었다.
중국 남부지방: 암석역학적 자료 분석을 통한 시추 위험도 감소
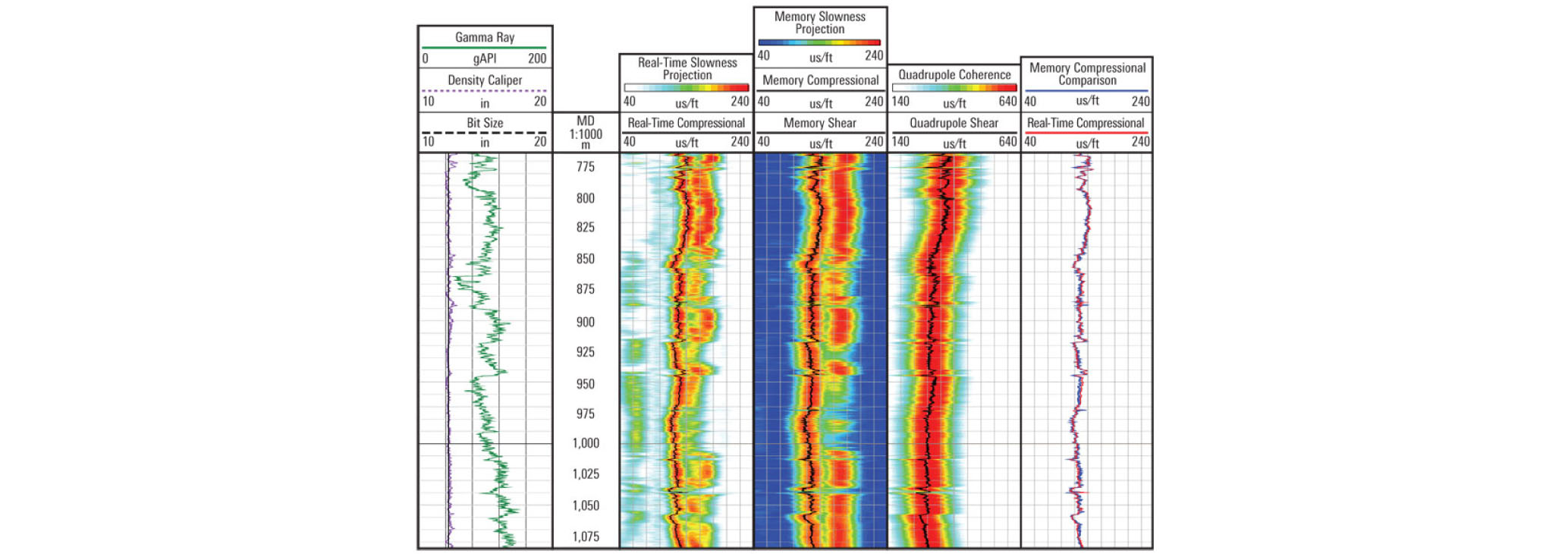
중국 남부지방의 한 해안가에서 고온고압 환경이었으며 지층의 높은 압력으로 인해 시추 이수 비중 안정조건 범위(mud weight window)가 좁았다. 따라서 시추 작업의 위험도를 관리하고자 고급 음파 측정 자료로부터 실시간으로 암석역학적 자료를 평가하기로 하였다(Schlumberger, 2014). 시추중 음파검층 장비는 2개의 음원과 48개의 수진기로 구성된 SonicScope*825 multipole를 이용하였으며 실시간으로 속도분석도 처리한다(Fig. 6). 실시간으로 측정한 P파 및 S파 속도 자료가 기록된 자료와 매우 잘 일치하였으며, 시추 이수 침투가 있음에도 불구하고 높은 공극률의 가스 지층을 정확히 평가하여 성공적으로 최종 유정 깊이까지 도달하였다.
시추중 비트에서 측정(Measurements at the bit)
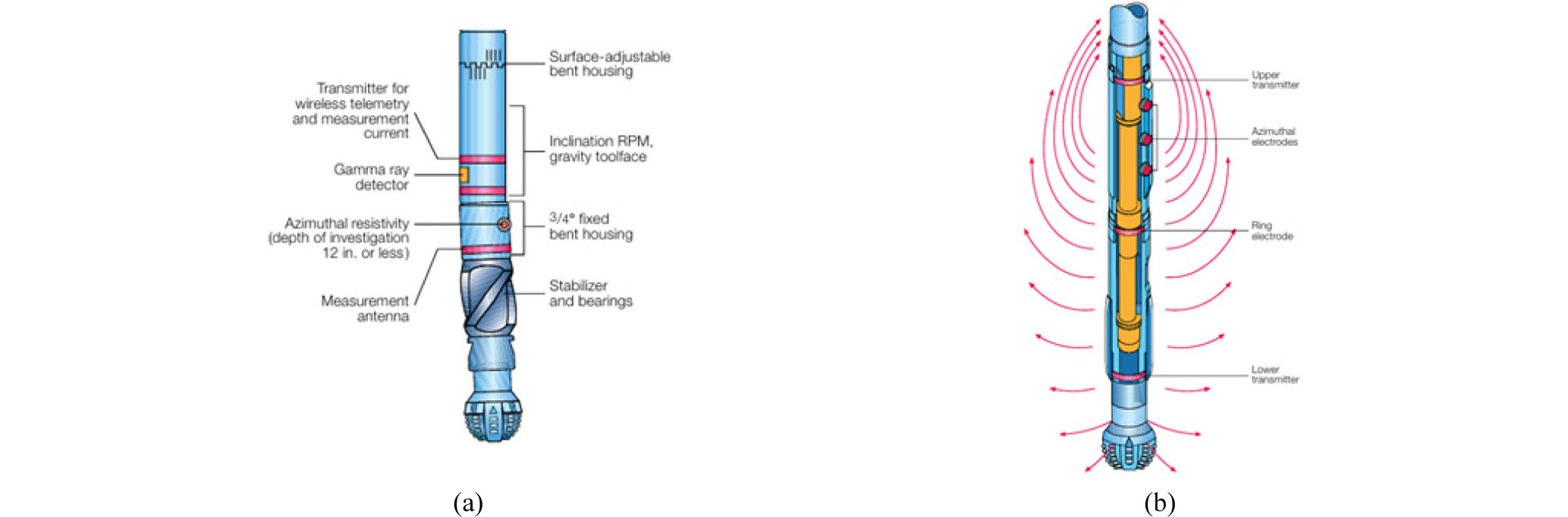
시추중 물리검층 장비는 시추 비트가 있는 시추 파이프에 검층 장비를 연결하는 방식으로 비트와 측정 센서의 간격이 12 m ~ 30 m 정도 발생한다. 이러한 비트와 검층 센서 간의 간격 차이로 인해 실시간으로 정보를 전달해야 하는 시추중 측정에서 시간적, 공간적으로 자료의 지연이 발생할 수 밖에 없다는 문제점이 발생하게 된다(Bonner et al., 1993). 비트의 속도는 시추 이수의 비중과 비례하기 때문에 비트 속도를 결정할 땐 지층의 압력 자료를 바탕으로 적절한 이수 비중을 찾는다. 그러나 복잡한 구조의 지층의 경우 실제 비트가 위치한 지층과 검층 센서가 위치한 지층의 압력이 다를 수 있는 것을 감안해야 하기 때문에 최대 시추 속도를 조절하는데 한계가 있게 되고 시추 속도의 효율이 떨어지게 된다. 또한 시추 궤도를 조정하는 방향제어(geo-steering)는 비트의 방향과 목표한 저류층의 경사 자료를 바탕으로 하게 되는데 저류층이 경사지고 두께가 얇은 경우 비트와 센서가 감지하는 지층 자료의 차이로 지층 평가의 정확성이 떨어져서 계획했던 궤도로 비트를 조정하는 데 어려움이 발생한다. 이러한 문제점을 해결하기 위해 최근에는 드릴 비트 자체에 검층 센서를 장착하여 지층 평가 및 시추방향제어를 할 수 있도록 하는 방법이 고안되었다. 드릴 비트와 측정 센서의 거리가 현저히 가까워졌기 때문에 실제 비트가 위치하는 지층의 정확한 평가를 통해 경사 및 수평 시추를 할 때 효율성을 높일 수 있다. 이러한 비트에서 측정(measurements at the bit) 혹은 비트에서 검층(logging at the bit)은 측정 대상에 따라 두 가지 영역으로 나눌 수 있는데, 주로 방향성 시추를 위한 시추방향제어(Fig. 7a)와 실시간 지층 검층을 수행할 수 있는 비트에서 전기비저항 측정(Resistivity at the bit; RAB)으로 구성되어 있다(Fig. 7b).
시추방향제어
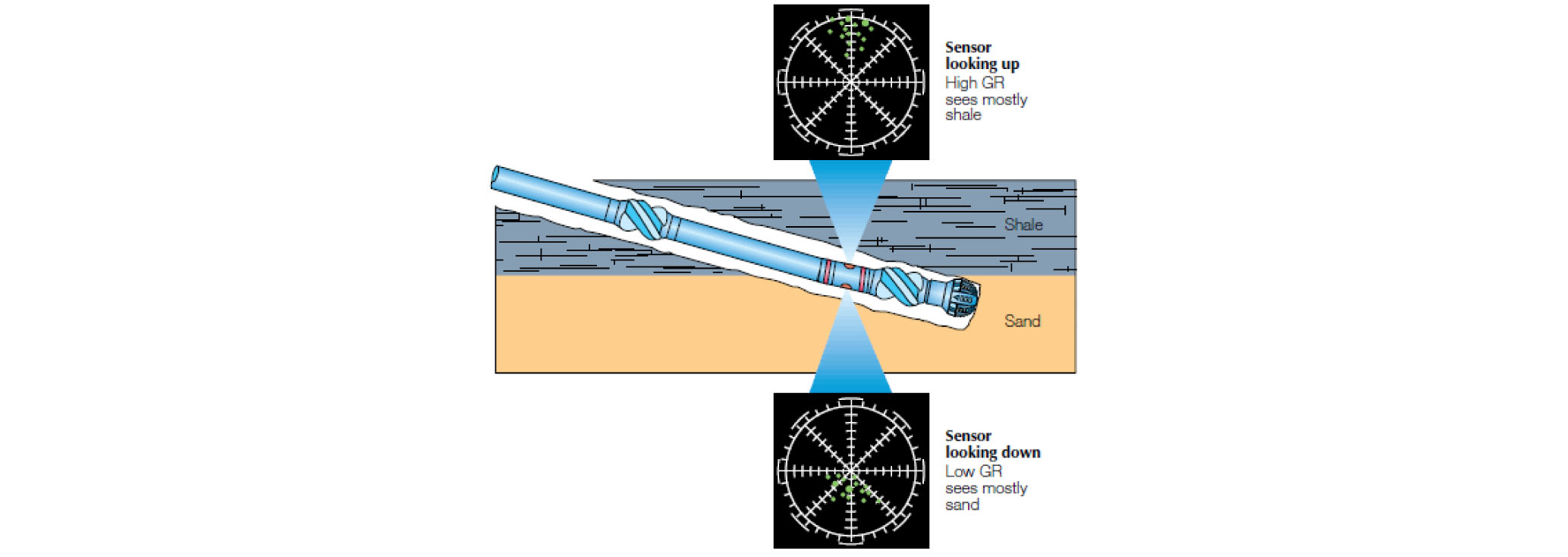
시추방향제어는 방향성 시추를 위해 필요한 자료를 측정하여 실시간으로 정보를 제공하면서, 실시간으로 탄화수소를 감지하는 역할을 하며, 자연감마선, 전기비저항, 레이디얼 전기비저항(시추공 벽면을 따라 좁은 영역을 탐사하는)을 측정한다(Bonner et al., 1993)(Fig. 7(a))
한 개의 전기비저항 센서가 있으며 전기비저항 해상도는 약 1.8 m이다. 지표에서 엔지니어는 시추공 주변의 전기비저항과 자연감마선에 대한 정보를 얻게 되며 드릴 비트의 위치와 전기비저항, 자연감마선 자료를 이용하여 지층 및 유체 경계면을 평가할 수 있다(Bonner et al., 1993)(Fig. 8). 만약 경사 시추를 하고 있는 비트가 셰일층과 사암층의 경계를 지나간다면 시추공의 상부는 셰일층의 높은 자연감마선을 측정하고, 시추공의 하부는 사암층의 낮은 자연감마선을 측정하기 때문에 비트가 셰일-사암층 경계면을 지난다는 것을 알 수 있다.
비트에서 전기비저항 측정(Resistivity at the bit; RAB)
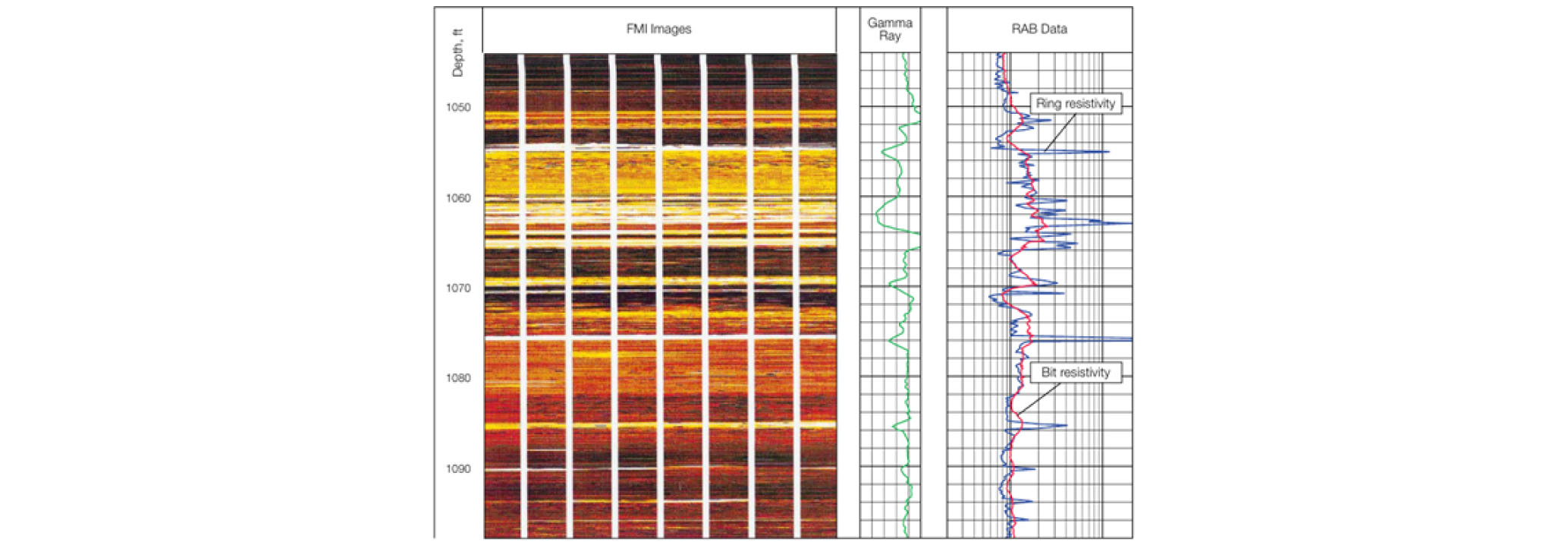
비트에서 전기비저항 측정(Resistivity at the bit; RAB)은 실시간으로 고해상도의 지층 탐사 자료를 제공한다. 시추방향제어와 마찬가지로 감마선, 전기비저항, 방위(azimuthal)를 측정하며 세 개의 전기비저항 센서와 한 개의 링 모양 전기비저항 센서가 있다(Bonner et al., 1993)(Fig. 7b). 주로 버튼으로는 시추공에서 발생하는 이수 침투와 킥 등을S 탐지하며, 세 개 버튼의 위치가 다양한 깊이에서 지층의 전기비저항을 측정하기 때문에 높은 해상도를 보여 실제 지층 구조와 비슷한 수준의 자료를 제공한다. 링 센서는 넓은 표면적으로 인해 버튼에 비해 높은 정확도를 가지며 약 0.6 m 정도의 고해상도로 정확한 전기비저항 검층을 가능하게 한다. 주로 적절한 코어링 및 케이싱 위치를 탐지하고 시추 후 이수 침투에 대한 모니터링에도 적용할 수 있다. 미국 Oklahoma에서 실시한 검층 자료에서 고해상도 지층 전기비저항 이미지를 제공하는 Schlumberger의 FMI(Fullbore Formation Micro Imager)와 RAB 자료를 비교하였을 때(Fig. 9), FMI 이미지의 매우 두께가 얇은 고비저항대(하얀색)을 나타내는 부분에서 RAB 자료가 높게 튀는 전기비저항 수치를 보여주었으며 2.5 cm 정도 수준까지 일치한 것을 보여주었다(Bonner et al., 1993).
결 론
초기 시추중 측정(MWD)은 시추공이 수직 방향으로 목표한 위치에 제대로 도달하는지 보기 위해 깊이와 방향을 측정하였으나 점차 수평 시추 기술이 발전하면서 시추 비트가 꺾어지는 각도와 함께 방위각을 측정하면서 기하학적 방향제어를 하게 되었다. 기하학적 방향제어 뿐만 아니라 현재 시추 비트가 위치한 지점이 예측했던 지질 환경이 맞는지 확인하기 위해 시추중 측정 장비에 간단한 자연감마선 혹은 전기비저항 등의 검층 센서도 함께 탑재하여 지질학적 방향제어도 하였으나 실시간 지층 분석으로 이어지진 못했다. 원격 송신 기술이 크게 발전하면서 시추 방향 제어를 위한 측정 자료뿐만 아니라 지층 분석을 위한 검층 자료도 실시간으로 송수신이 가능하게 되어 더욱 세밀하고 효율적으로 지층을 분석하고 최적의 시추정 배치를 할 수 있게 되었다.
이 기술보고에서는 이러한 실시간 시추 측정 및 검층의 기본적인 시스템에 대하여 정리하고 물리탐사 분야에서 가장 대표적인 Schlumberger사를 중심으로 2000년대까지 시추중 검층 장비의 발달 과정과 검층 목적에 따라 분류된 최신 장비들을 기반으로 장비의 특성들을 분석과 함께 이를 활용한 대표적인 해외 적용 사례를 정리하였다. 또한 기존에 드릴 비트 위에 시추중 검층 장비를 부착하여 지층 정보를 측정하는 방식은 드릴 비트 자체를 조정해야 하는 사용자로 하여금 거리적으로, 시간적으로 오차를 유발하게 할 수 있기 때문에 최근에는 드릴 비트에서 직접 지층 정보와 시추 위치를 측정하는 방법이 개발되어 사용되고 있다. 방향성 시추가 필요한 셰일 가스나 석탄층가스 저류층의 경우 실시간 지질 특성 및 시추 경로 제어가 필수적이며 최근에는 지반 조사 등의 엔지니어 적용 분야에서도 검층이 많이 이루어지고 있다. 따라서 국내 시추중 측정 및 실시간 시추중 검층 기술 개발 및 응용을 위해 이 기술보고에서 수행한 체계적인 기술과 현황에 대한 분석은 향후 국내의 방향성 시추 사업뿐만 아니라 기술 자립화의 기초가 될 것이라 판단된다.
부록 A. 시추중 측정 원거리 통신 시스템
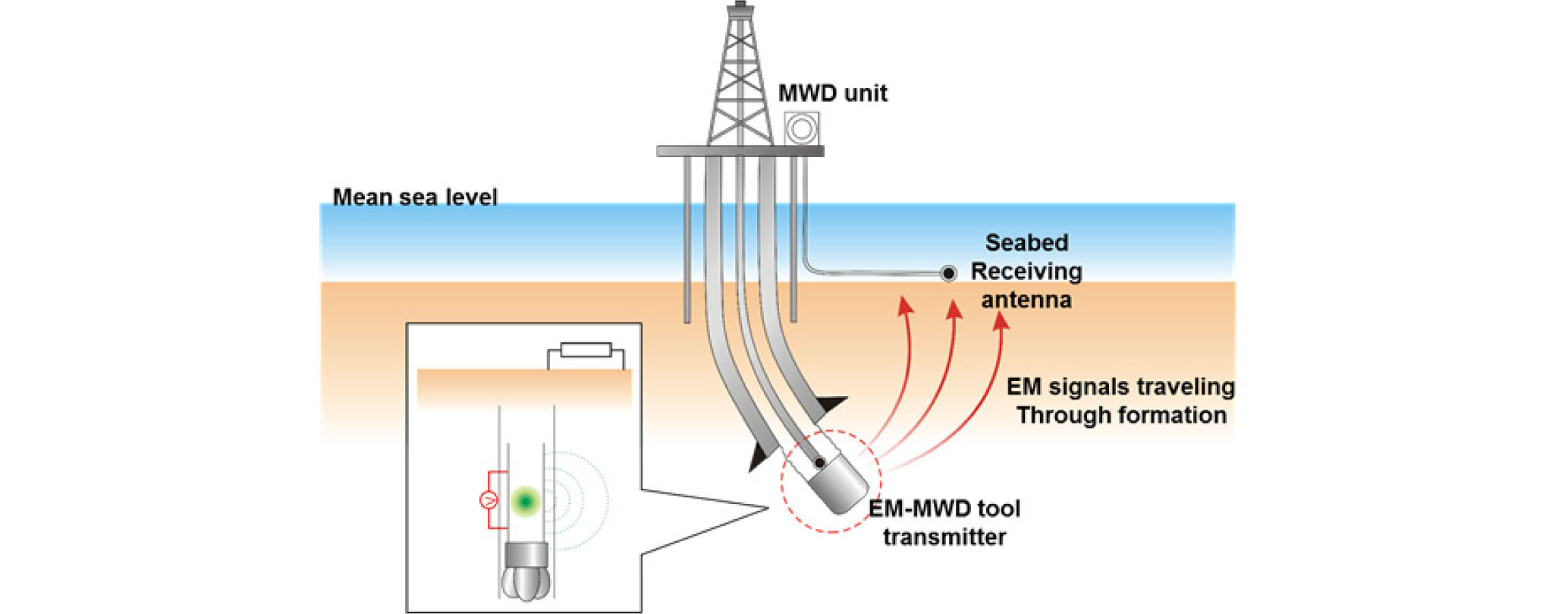
원거리통신 시스템(Telemetry system)은 시추중 측정 및 시추중 검층 센서에서 측정한 자료를 지표까지 전송하는 역할을 하게 되는데, 이수펄스(mud-pulse; MP) 방식과 저주파 전자기 (electromagnetic; EM) 원격통신이 가장 널리 이용되고 있다(PetroWiki, 2016). 전자기 원격통신에 기초한 시추중 측정을 전자기 시추중 측정(EM MWD)이라 하며 이수펄스 원격 통신에 기초한 경우는 이수펄스 시추중 측정(MP MWD)라고 부른다. 이수펄스 원격통신 방식은 1 ~ 1.5 bits/sec (bps) 정도의 속도로 자료를 전송할 수 있는 반면, 전자기 원격통신은 이보다 약 5배 이상 빠른 10 bps 정도까지 전송할 수 있다.
이수펄스와 전자기 원격통신이 동시에 적용되는 경우도 많으며 이 경우 최대 16 bps까지 전송이 가능할 수도 있다. 전송 속도에 있어서는 전선 시추 파이프(wired drill pipe) 형식이 약 60 kbps까지 전송이 가능하다고 알려져 있으나 아직은 널리 적용되고 있는 않다. 이 장에서는 가장 널리 적용되고 있는 이수펄스 원격통신과 전자기 원격통신에 대해서 간략하게 알아본다.
이수펄스(Mud-Pulse) 원격통신
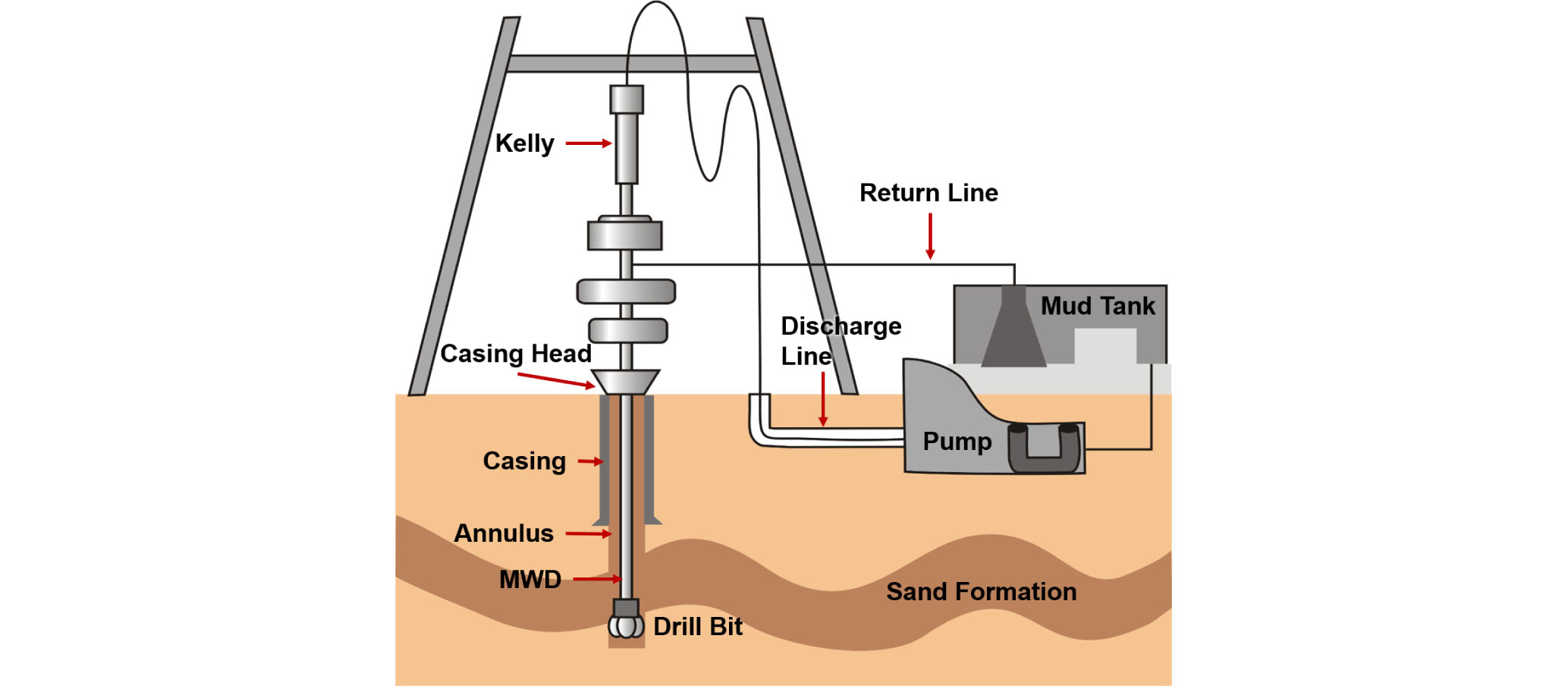
이수펄스 원격통신은 시추중 측정 자료 전달 방식 중 가장 많이 쓰이는 방법으로 원활한 시추를 위해 사용하는 이수를 이용하는 방식이다(Fig. A.1). 시추 이수는 지상에서 펌프를 이용하여 시추 파이프(drill string) 내부로 주입된다. 주입된 이수는 시추중 측정 및 시추중 검층 장비 등을 통과하여 시추 비트를 통해 시추공으로 나온 뒤 시추공과 시추 파이프 사이를 지나서 지상으로 돌아오게 된다. 이수펄스 원격통신은 이러한 시추 이수의 순환을 통해 자료를 전달한다. 즉, 시추공저에서 시추 파이프의 이수 흐름을 밸브로 제어하여 이수압력을 변화시킴으로써 이수펄스를 형성할 수 있고 이와 같이 형성된 펄스는 시추공벽과 시추 파이프 사이의 이수를 따라 전파하여 지상으로 전달될 수 있다. 시추중 측정 장비에서 측정한 자료를 암호화(Line coding)하여 이수펄스 형태로 자료를 보내면, 시추공의 이수를 따라 전송된 펄스를 지상의 압력 센서에서 측정하여 암호화 된 신호를 복호화(decoding) 하여 디지털 정보로 변환하게 된다(Spinnler, 1978).
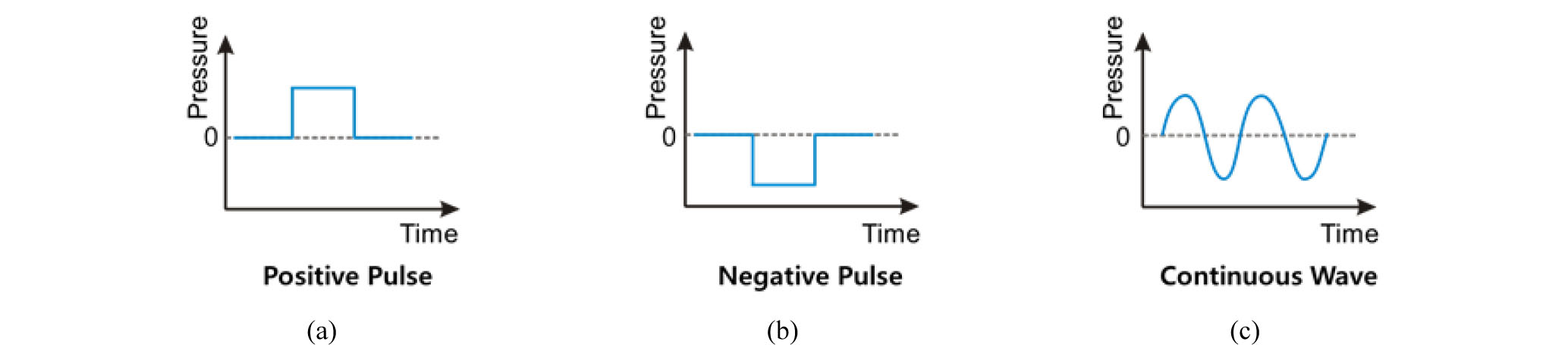
시추 파이프 내부 밸브를 조정하는 것으로 이수펄스를 발생시켜 이 압력파를 지상으로 보낼 때, 이수펄스를 발생시키는 방식에 따라 양의 펄스(positive-pulse), 음의 펄스(negative-pulse), 연속 펄스(continuous-wave)로 나뉜다(Fig. A.2). 양의 펄스는 시추 파이프 안에 있는 이수의 흐름이 있을 때, 밸브를 추가적으로 열어 압력을 증가시켜서 펄스를 만들고(Fig. A.2a), 음의 펄스는 밸브를 닫아 이수 압력을 낮추면서 펄스를 형성한다(Fig. A.2b). 한편 연속 펄스는 밸브를 점진적으로 닫고 열어 부드럽게 변화하는 연속적인 파형의 형태로 자료를 보낸다(Fig. A.2c). 3가지 방식 중에서 연속 펄스 방식이 가장 널리 이용된다.
이러한 이수펄스 방식은 이수가 시추공 내에 연속적으로 분포하고 있는 경우에 적용 가능하며, 이수가 연속적으로 분포하고 있다고 해도 시추공 압력이 지층 압력보다 낮은 경우는 적용하기 힘들다. 또한 시추 이수의 등가 밀도를 낮추기 위해 이수에 주입된 압축 가능한 가스가 있는 경우에도 가스가 신호를 매우 감쇠시켜 이수펄스 방식을 통하여 자료를 전송하기 어려워진다. 시추 시 이수 손실이 크거나 시추공 불안정성이 높아 이수를 사용하지 않고 시추할 경우에는 이수펄스 방식을 적용할 수는 없다. 이처럼 이수펄스 방식을 이용할 수 없거나 보다 빠른 자료 전송을 위해서는 낮은 진동수의 전자기파를 이용하여 전송하는 전자기 원격통신법 등을 적용하여야 한다.
전자기(Electromagnetics; EM) 원격통신
실시간 시추중 측정/검층에서 사용하는 전자기 원격통신 기술의 골자는 전자기파를 이용하여 실시간으로 측정된 자료를 송신하고 지표에서 자료를 수집한 뒤, 적절한 방향으로의 방향제어 명령을 하달하는데 있다. 전자기 원격통신의 원리는 우리가 매일같이 사용하고 있는 휴대전화에서 사용한 방식과 크게 다르지 않다. 일련의 과정은 큰 틀에서 보았을 때, 신호의 변조, 송신, 수신, 복조로 이루어지게 된다. 이 단락에서는 전자기 원격통신에 대한 일반적인 방법을 이야기하고자 한다.
전자기 원격통신은 아주 낮은 진동수 영역(2 ~ 12 Hz)의 교류 전압을 시추파이프 상부와 하부 사이에 줌으로써 전자기파를 발생시켜 자료를 송신한다(Fig. A.3). 시추파이프 두 지점의 전압차를 발생시키기 위해서 시추 비트 등이 부착되어 있는 시추파이프의 하부와 상부 사이에 전기적 절연체(gap sub assembly)가 부착되어 있다(E-Spectrum Technologies Incorporated, 2005). 시추중 측정 장치에서 송신한 전자기파가 지표면까지 전파하게 되면 지표면의 임의의 두 지점 사이에서 전위차를 형성할 것이므로, 지표면에서는 전극을 2개 지점에 설치하여 두 지점 사이의 전위차를 측정함으로써 전자기파를 받을 수 있게 된다.
송신 파형은 사용한 변조(modulation)방식에 따라 결정되고 EM MWD에서 정보를 담고 있는 파동은 디지털 변조(digital modulation)를 통해 만들어진다. 디지털 변조는 이진수로 이루어진 자료에 따라 진폭(amplitude shift keying; ASK), 위상(phase shift keying; PSK), 진동수(frequency shift keying; FSK) 등을 변화시키는 것이다.
디지털 변조 방식으로 만들어진 신호는 송신원을 통해 지표로 보내지고 지표에서는 송신된 전자기파로 인한 두 점 사이의 전기적 위치에너지의 차이를 측정 하는 것으로 신호를 수신한다. 이때, 송신된 전자기파는 지표까지 도달할 때, 지하 매질의 전기전도도에 비례하여 신호의 감쇠가 일어난다.
변조를 통해 지표로 송신된 전자기파에서 자료의 수신 가능성을 파악하는 데에는 수신기의 성능이 가장 중요하다. 수신기로는 전치증폭기(preamplifier)와 아날로그 디지털 변환기(A/D converter)로 이루어진 디지털 전압계를 사용하기도 하며(Swtzer et al., 2015), United States National Semiconductor Device Corp.의 LM1893을 이용하기도 한다(Yi. et al., 2013). 측정 센서의 성능은 동적 범위(dynamic range)와 분해능(resolution)으로 표현할 수 있다(Halamek et al., 2001). 동적 범위는 측정 가능한 신호의 상한과 하한 사이의 범위를 의미하고 분해능은 측정해야 할 값의 상한선이 정해 졌을 때 장비에서 구별 가능한 가장 작은 값을 의미한다. 동적 범위의 하한선은 보통 장비에서 발생하는 잡음(noise)이 분해능 보다 큰 경우 장비의 자체 소음이 동적 범위의 하한선으로 결정되고 반대로 분해능이 소음보다 큰 경우에는 분해능이 동적 범위의 하한선으로 결정된다.
수신기를 통해 성공적으로 측정된 신호는 대역통과필터(bandpass filter)와 복조기(demodulator)를 거쳐 아날로그 신호에서 디지털 자료로 변환되기도 하며(Swtzer et al., 2015), 장비에 따라 저역대역필터(low pass filter), 전치증폭기, 잡음필터 등으로 이루어진 LM1893을 이용하기도 한다(Yi et al., 2013). 대역통과필터와 저역대역필터 등의 필터들은 송신원으로 사용하지 않은 진동수 대역을 효과적으로 제거하여 외부의 잡음을 제거하는 역할을 하고 복조기는 수신된 아날로그 신호를 디지털 자료로 변환하는 역할을 수행한다.
전자기 펄스에 기초한 원격 통신 시스템은 시추 유체가 이수 대신 공기나 거품을 사용할 때도 지층과 압력 균형이 불안정한(underbalanced) 시추공 등에서와 같이 이수와 가스가 공존하는 경우에도 사용 가능하다. 그러나 지층의 전기전도도가 높거나, 시추정의 깊이가 깊어지면 전자기파의 감쇠가 커지므로 지표까지 도달하지 못할 수도 있다는 단점이 있다.
기술 동향
최근 원거리 통신 시스템은 시추제어를 위한 간단한 측정 자료뿐만 아니라 대상 저류층에 대한 시추중 검층 자료까지 실시간으로 전송할 수 있을 만큼 발전하였다. 즉, 최신 시추중 측정 원격통신 시스템은 100 bps에 달하는 빠른 속도로 자료를 전달할 수 있기 때문에 시추중 측정기기에 시추중 검층기기를 결합하여 적용함으로써 시추중 검층기기로부터 얻는 자료를 실시간으로 분석하여 저류층 정보를 파악할 수 있게 되어 실시간 시추중 검층이 가능해졌다. 이러한 실시간 검층 자료들은 저류층에 대한 실시간 특성화가 가능하므로, 실시간 특성화 분석에 기초하여 필요하다면 시추중 능동적으로 시추 궤적을 변경할 수 있게 되었다.
부록 B. 시추중 측정 전력시스템
시추중 측정 장치에 전력을 공급하는 전력시스템(Power system)은 크게 배터리형, 터빈형 두 가지로 분류된다(PetroWiki, 2016). 배터리형은 주로 리튬-티오닐 염화 배터리(Lithium-thionyl chloride battery)를 사용하는데 높은 에너지 밀도와 시추중 측정을 시행하는 환경의 온도에서 잘 견디는 장점이 있다. 그러나 즉각적으로 에너지를 발생시키는 데 한계가 있다. 또한, 180°C가 넘는 고온 환경이나 운반할 때 폭발 위험이 있으며 재충전이 불가능하고 처분할 때 환경적인 제한을 받게 된다. 터빈형은 시추 이수의 흐름으로부터 동력을 얻게 되는 방식이다. 터빈 회전 날개에 의한 회전력은 교류 발전기로 송신되어 여러 진동수의 교류 전류를 발생시키고 전기 회로가 이 교류 전류를 직류 전류로 바꾸어 사용하게 된다. 터빈형 회전 날개들은 다양한 시추 이수 유속과 시추 이수를 순환시키는 환경을 견딜 수 있어야 한다. 배터리형과 터빈형은 각각 장점과 단점이 있기 때문에 어떤 시추 조건에서도 전력 공급이 방해 받지 않도록 많은 시추중 측정 시스템에서 두 유형을 적절히 함께 사용하는 방식을 택하고 있다.
부록 C. 시추중 측정 방향센서
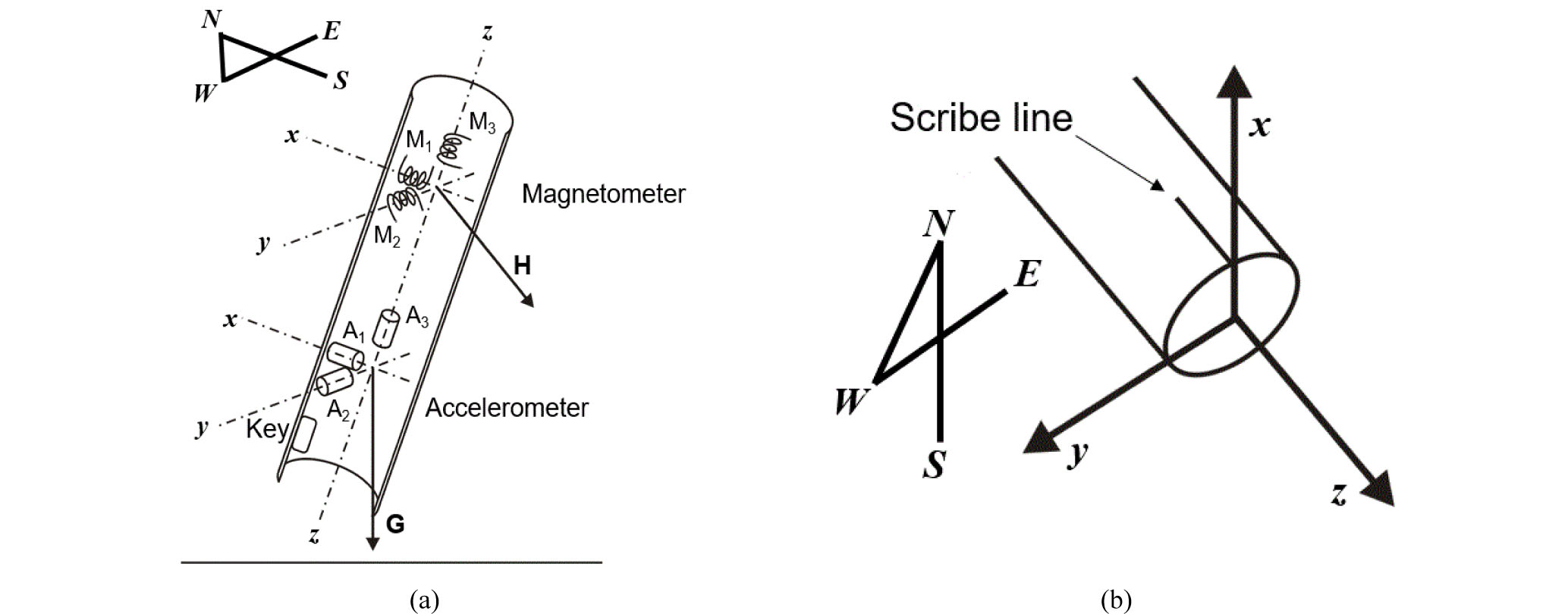
방향 센서(Directional sensors)는 서로 직교하는 3개(각각 x, y, z)의 중력가속도계(accelerometer)와 자력계(magnetometer)에 기초하여 중력 및 지자기력을 각각 측정함으로써(Fig. C.1), 시추 장비의 방위각(Azimuth), 경사(inclination), 자기장 장비면방향(magnetic foolface; MTF) 중력 장비면방향(gravity toolface; GTF)(PetroWiki, 2016)(Fig. C.2), 전체 중력장, 전체 자기장 등을 측정한다. 이때 방향 센서의 z 방향은 장비의 축방향이고, x 방향은 시추중 측정 장비와 수직한 평면 상에서 장비표면의 기준방향(scribe line)으로 하고, y 방향은 x와 수직한 방향으로 정한다(Fig. C.1b). 이러한 측정 자료는 시추 기술자가 계획된 시추 궤도를 따라 작업이 진행되고 있는지의 여부를 파악하기 위한 실시간 시추공 궤적 감시(real-time well-trajectory monitoring)에 필요한 정보가 되거나 때에 따라 원하는 방향으로 시추하기 위해 필요한 기하학적 방향제어 정보로 활용된다.
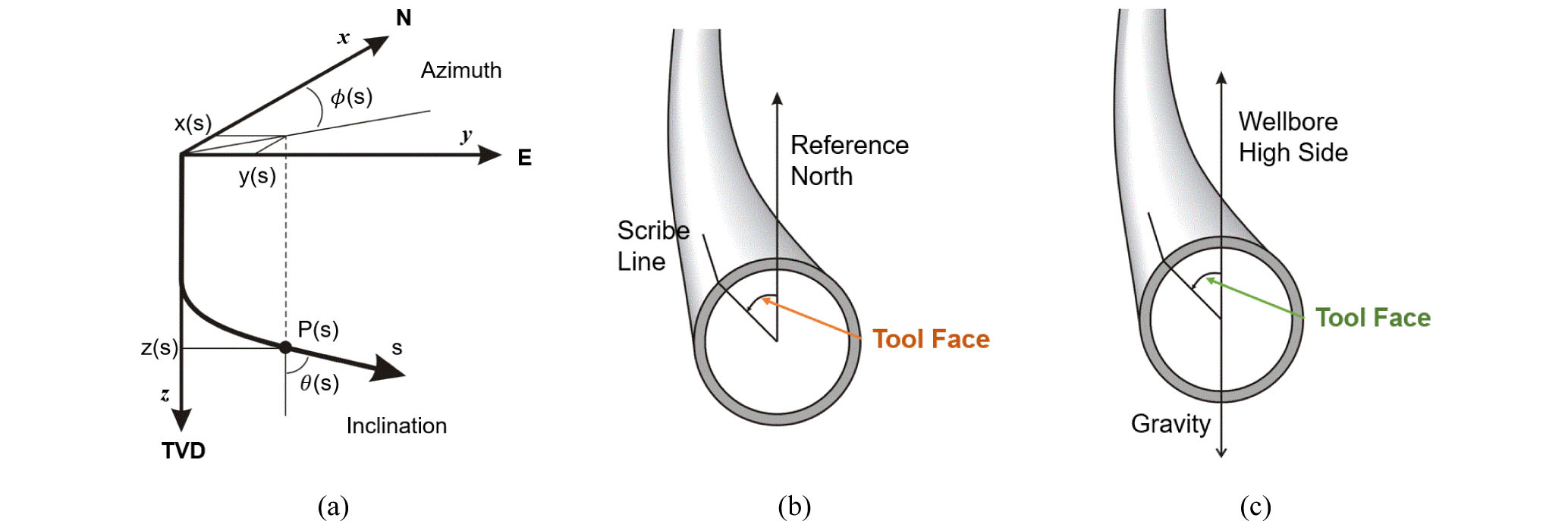
방위각은 기준점을 북쪽으로 하였을 때의 시추공이 이루고 있는 각도로 동쪽을 향하고 있으면 90°, 남쪽은 180°, 서쪽은 270°가 된다(Fig. C.1a). 이에 반해 경사는 수직 시추공에 대한 각도로 수직 시추공은 경사가 0가 되며 수평정은 90°가 된다(지층의 경사(dip)은 수평면에서의 각도인 것에 주의). 방향성 시추공의 총 깊이(measured depth; MD)는 전체 시추된 시추공 궤적(s)을 따라 측정된 길이로 실제 수직 깊이(true vertical depth; TVD)와는 다르다.
장비면방향이란 시추공 내에서의 측정 장비가 향하고 있는 방향을 파악하기 위해 측정하는 값으로, 장비의 기준방향(x 방향)이 지구 자기장과 이루고 있는 각도인 자 자기장 장비면방향과 연직방향(high side)(Fig. C.2b) 혹은 중력의 반대방향과 이루고 있는 각도인 중력 장비면 방향을 측정한다(Fig. C.2c). 이때 각도는 오른손 법칙에 기초하여 엄지를 시추공 방향으로 한 뒤, 4개의 손가락이 가리키는 방향이 양의 방향이 된다. 즉, 지구 자기장 측정에 기초하고 있는 자기장 장비면방향은 시추공의 수직면에서 자북에 대한 각도(북: 0°, 동: 90°, 남: 180°, 서: 270°)로 나타내고, 중력 장비면방향은 연직 방향(high side)이 0°이고 중력 방향이 90°가 된다.
일반적으로 낮은 각도에서는 자기장 장비면방향이 보다 정확하고 높은 각도에서는 중력 장비면방향이 보다 정확하기 때문에 자기장 장비면방향은 시추공이 거의 수직공일 때(시추공 최대 경사가 5°에서 8° 정도일 때까지만) 이용하며 중력 장비면방향은 경사가 더 큰 경우에 적용한다. 이와 같이 측정된 자료는 원거리 통신 경로(telemetry channel)을 통해 지표로 전송되어 방위각 교정하는 데 사용된다. 최근에는 더 깊고 복잡한 저류층을 시추하기 때문에 시추공저(bottomhole)의 정확한 위치를 알아내기 위해 오차를 일으키는 요인들을 제거하고자 표준 오차 모델을 만들어 사용한다. 불확실한 측정 깊이와 시추공저 평가 자료는 정확한 절대 깊이를 알아내는 것을 가장 어렵게 하는 오차 요인으로 꼽힌다.
최근 자이로스코프(gyroscope)의 발전으로 이를 내비게이션으로 이용하기도 하는데, 기존 내비게이션 센서보다 정확하며 자기장으로부터 방해를 받지 않는다는 장점이 있다. 자이로스코프는 주로 자기장 방해를 받는 지역에서 킥오프(kick-off, 수직으로 진행되던 시추관이 처음으로 휘어지는 것) 작업을 할 때 시추 작업 시간을 줄이기 위해 사용한다.
