

서 론
연구지역
연구 방법
Arduino와 센서를 이용한 데이터 취득 디지털 장치 개발
스마트폰을 이용한 데이터 공유 애플리케이션 개발
연구 결과
강원대학교 삼척캠퍼스 모의실험 결과
광산 현장 실험 결과
결 론
서 론
광산 현장에서 사용되는 대부분의 운반로는 비포장도로로 되어있으며, 이로 인해 광산물의 운반 시간이 길어지고 많은 연료 소비 및 타이어 파손 문제가 생길 수 있다. 운반로의 노면 불량 정도가 심각할 때는 해당 구간을 활용할 수 없거나, 운반 작업 시 사고를 유발하여 인명 피해를 초래할 수도 있다. 1980년대 이후 광산 내 운반 작업으로 인한 피해자는 줄어드는 추세지만, 최근 10년간의 피해자 수는 약 60명으로 여전히 빈번한 사고가 발생하고 있음을 알 수 있다(KORES, 2020). 따라서 더욱 안전한 광산 환경을 구축하기 위해서는 운반 작업에서의 위험을 줄여야 하며, 이를 위해서는 운전자의 시야를 확보하거나 광산 현장의 위험을 사전에 감지하고 대비할 필요가 있다.
Choi et al.(2008)은 지리정보시스템(Geographic Information System, GIS) 기반의 가시 구역 분석기법을 적용하여 노천광산 운반도로 내에서의 가시거리를 평가하고 위험지역을 예측하였다. 또한, GIS 기반의 다기준 의사결정기법(multi‐criteria evaluation)과 최적경로 분석기법을 결합하여 운반 과정에서의 소요 시간과 위험 가능성을 낮추기 위한 연구도 이루어졌다(Choi et al., 2009). 최근에는 사물인터넷 기반의 네트워크 기술을 활용하여 광산 현장에서의 안전성을 높이기 위한 다양한 시도들이 이루어지고 있다. Baek et al.(2017)은 지하광산에 부착된 블루투스 비콘(Beacon)과 통신할 수 있는 운반 차량용 스마트폰 애플리케이션을 개발하여 지하에서도 운반 차량의 현재 위치를 파악할 수 있도록 하였다. 또한, 저전력 블루투스(Bluetooth Low Energy, BLE) 기술을 개별 차량이나 작업자의 안전모에 적용하여 근접 시 경고를 통해 사고를 예방하는 연구도 수행되었다(Baek et al., 2018). 노천광산에서는 운반 차량 및 중장비에 GPS를 설치하여 운행 및 안전 현황을 파악하기 위한 연구가 다수 이루어졌으며(Sun et al., 2010; Sunwoo et al., 2010), 상용화된 시스템이 국외뿐 아니라 국내 광산에도 점차 보급되고 있다. 이외에도 다양한 센서와 무선통신 기술(블루투스, ZigBee, Wi-Fi 등)을 결합하여 지하광산 내 진동 및 분진을 모니터링할 수 있는 연구와(Lee et al., 2022), 광산 내의 유해가스 환경을 모니터링하는 연구도 이루어지고 있다(Park et al., 2019; Kim, 2019; Kim et al., 2020). 그러나 이러한 연구들은 대부분 특정 위치에 센서를 고정하여 해당 지점에서의 변화만을 관측할 수 있으며, 작업자가 착용할 수 있는 웨어러블 시스템도 자신 주변의 환경만을 감지할 수 있다는 한계점이 있다. 작업자들이 광산 현장에서의 위험을 감지하고 신속하게 대처하기 위해서는 첫 번째로 자신 주변의 환경을 파악할 필요가 있으며, 두 번째로는 다른 작업자가 처한 환경, 혹은 다른 지역의 환경을 파악할 필요가 있다. 그러나 이동 중인 작업자나 차량, 장비의 주변 환경을 감지하는 연구는 아직 부족하며, 취득한 정보를 공유하는 시스템에 관한 연구는 매우 미흡한 실정이다.
자동차 산업에서는 전기차, 자율주행, 원격제어 등의 기술 발전과 함께 차량과 차량의 정보를 연결할 수 있는 V2V (Vechicle to Vechicle) 기반의 양방향 통신이 발전하고 있다. 이러한 커넥티드 카(connected car) 기술은 일상생활 속에서 활용성이 점점 높아지고 있으며(Park, 2014), 커넥티드 카 시장은 2017년 82조 원 수준에서 2025년 245조 원으로 연평균 14.8% 성장할 것으로 전망된다(Digital Times, 2022). 차량 간 공유기술과 사물인터넷 기술을 산업현장의 중장비 및 운반 차량에 적용한다면, 차량 내부에서도 외부 센서를 통해 현장의 환경 감지가 가능해지며 개별 차량이 취득한 정보를 네트워크를 통해 공유할 수 있을 것이다. 본 연구에서는 광산 현장에서 발생할 수 있는 사고를 사전에 방지하기 위해 차량 간에 정보를 공유할 수 있는 스마트폰 애플리케이션을 개발하였다. 차량 외부에 부착한 센서를 통해 운반도로의 노면 상태와 분진량, 가스 농도 등을 감지하였고, 개별 차량에 부착한 스마트폰에서 이러한 데이터를 수신하여 위치 정보와 함께 실시간으로 공유하고 가시화할 수 있는 시스템을 구축하였다.
연구지역
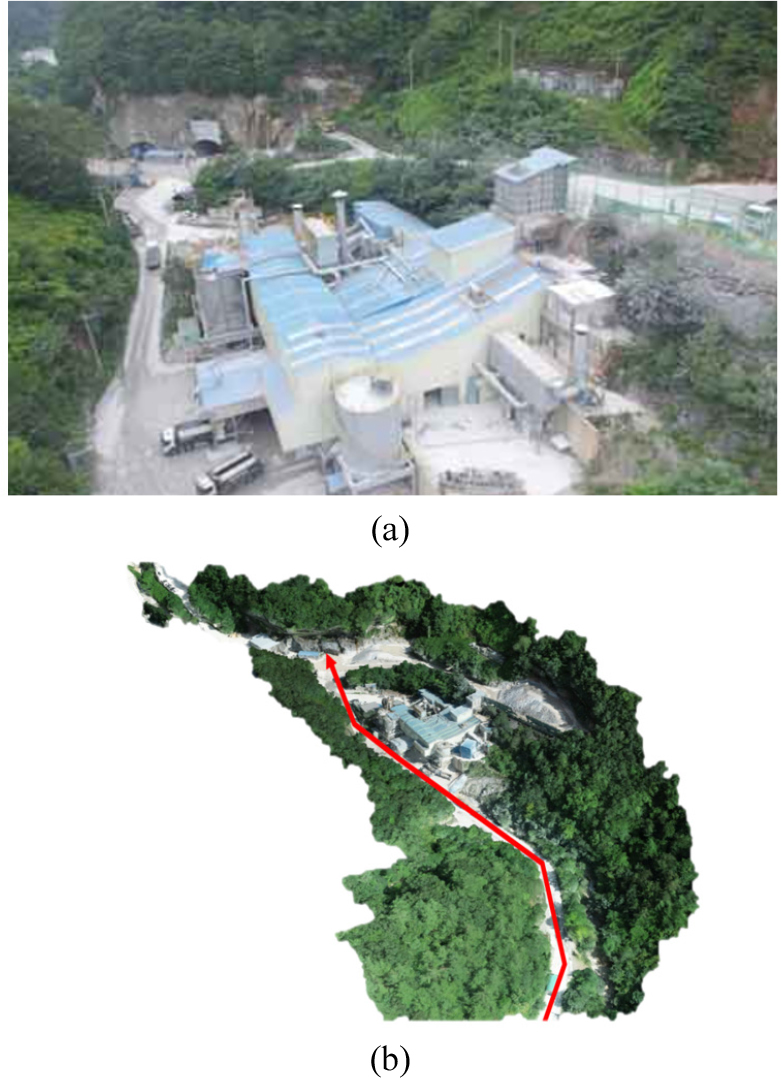
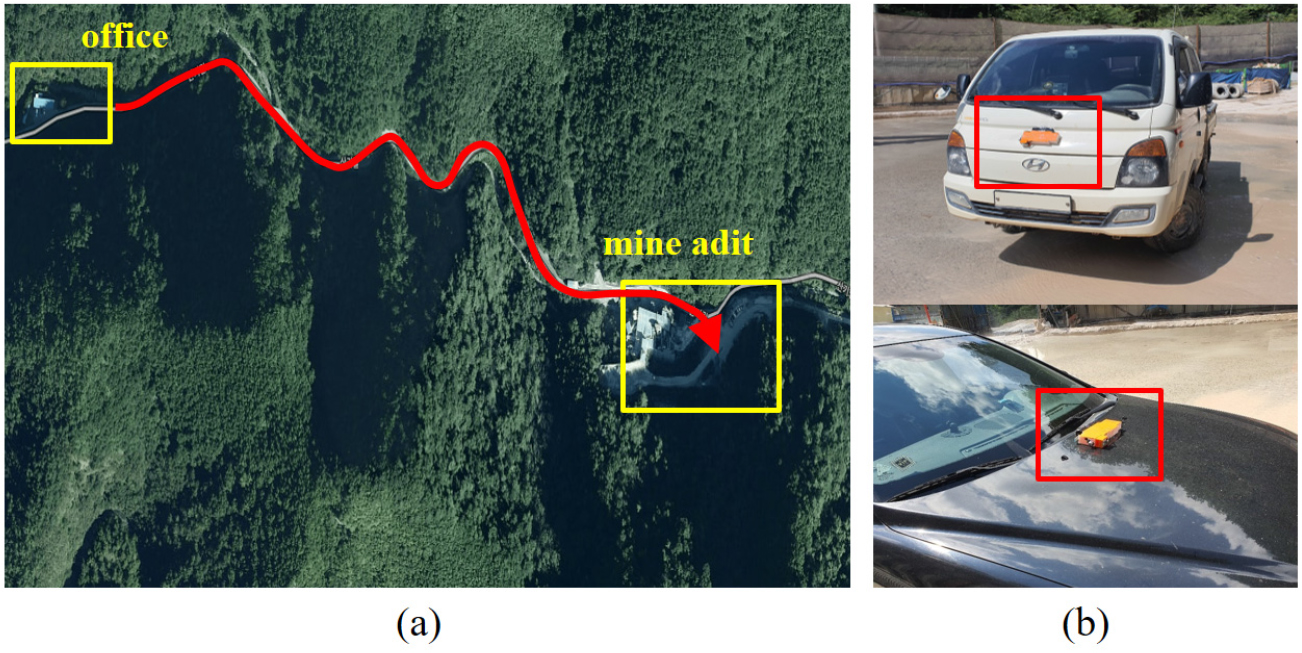
본 연구에서 개발한 시스템을 적용하기 위해 강원도 삼척시 도계읍에 위치한 태영EMC 삼도사업소(Fig. 1(a))를 연구지역으로 선정하였으며, 강원대학교 삼척캠퍼스 내에서 사전 실험을 진행하였다. Fig. 1(b)는 태영EMC 삼도사업소 사무실에서 갱구까지의 운반도로를 따라 드론으로 촬영한 3차원 영상이며, 차량에 센서 시스템과 스마트폰을 설치하여 해당 경로를 따라 테스트를 진행하였다. 삼도사업소는 1993년 4월 삼도광업소로 설립되었으며 대상 지역의 지질은 고생대 조선누층군의 풍촌층, 화절층, 동점층, 두무동층, 막동층 및 이들을 후기에 관입한 시대미상의 암맥류로 구성되어 있다. 삼도사업소는 주로 제철 및 제강용 석회석을 생산하는 광산으로 풍촌층 상부석회암층을 주개발 대상으로 하며, 잔주식채광법을 적용하여 개발하고 있다. 삼도사업소에서는 연간 약 150만 톤의 석회석을 채광하여 운반 차량의 운행이 매일 반복되고 있으므로 운반도로 및 갱내 환경을 안전하게 유지하는 것이 매우 중요하다. 본 연구에서는 Fig. 1(b)에 표시한 운반경로를 따라서 차량을 운행하며 개발한 시스템을 적용하였다.
연구 방법
차량 내에서도 외부 현장의 환경을 모니터링하기 위해서 마이크로 컨트롤러인 Arduino와 다양한 센서를 활용하여 노면의 거칠기 상태, 분진량, 가스 농도 등을 측정할 수 있는 디지털 장치를 개발하였다. 감지된 데이터는 Bluetooth 모듈을 통해 차량 내에 설치된 스마트폰으로 전송되며, 애플리케이션을 통해서 차량 간 서로의 위치와 정보를 교환할 수 있도록 하였다. 이를 통해 개별 차량에서 측정한 결과를 운전자뿐 아니라 다른 차량의 운전자도 확인할 수 있는 시스템을 구현하였다(Fig. 2).

Arduino와 센서를 이용한 데이터 취득 디지털 장치 개발
본 연구에서는 분진 밀도, 가스 농도, 노면 상태 등의 데이터를 취득하기 위해서 각각의 목적에 맞는 센서를 활용하였다. 광산 현장에서 발생하는 분진의 밀도를 측정하기 위해서는 미세먼지 측정에 주로 활용되는 먼지 센서(GP2Y 1014AU0F)를 사용하였다(Fig. 3(a)). 해당 센서는 –10°C ~65°C에서 작동되며 PM(Particulate Matter) 2.5, 즉 2.5 µm 이하의 비교적 작은 입자의 검출이 가능하다. 이 센서는 적외선 발광다이오드(light emitting diode, LED)와 포토트랜지스터를 이용하여 먼지를 광학적으로 감지하며, 이에 따른 전압의 변화량을 측정하여 먼지의 밀도를 예측한다. 최대 약 500 µg/m³까지 분진 밀도를 측정할 수 있으나 저가로 제작된 제품이라 측정한 분진 밀도의 정확도가 높지 않고 제품에 따라서 민감도에 편차가 있다. 따라서 본 연구에서는 분진의 밀도에 따라 전압이 정비례하는 특징을 고려하여 제품마다 전압과 분진 밀도의 관계식을 구하고, 제품에 따라 별개의 보정식을 적용하였다.
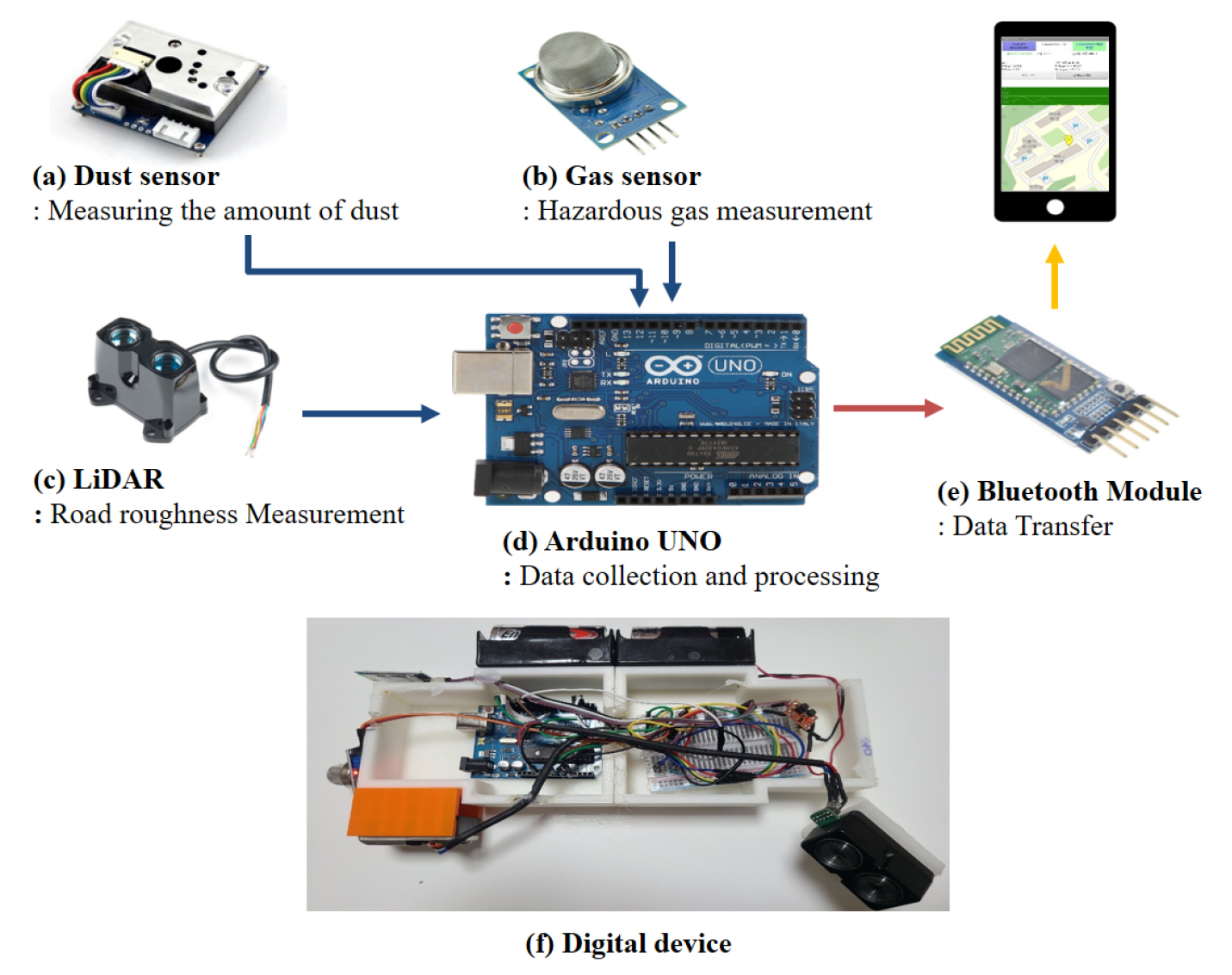
광산에서의 채굴 과정 중 발생할 수 있는 유해가스 농도를 측정할 수 있도록 MQ-135 가스 센서를 사용하였다(Fig. 3(b)). MQ-135 가스 센서는 암모니아, 벤젠, 알코올, 이산화탄소 등의 가스를 약 10 ppm에서 1,000 ppm 사이의 값으로 검출하는 센서로 정상적으로 값을 측정하기 위해서 약 3분의 예열시간이 필요하다. 센서의 민감도는 측정하려는 가스의 유형과 환경에 따라 달라지므로 정확한 측정을 위해서는 제어되는 환경에서의 보정이 필요하다. 그러나 본 연구의 대상 지역인 삼도사업소는 석회석 광산이므로 유해가스의 방출이 미미하며, 따라서 정확한 가스 농도를 측정하는 것이 주목적이 아니므로 개별 센서에 대한 정밀한 보정 과정은 생략하였다.
광산 현장의 노면 상태를 파악하기 위해서는 빛을 이용해 거리를 감지할 수 있는 포인트 기반의 라이다(Light Detection and Ranging, LiDAR) 센서를 사용하였다. LiDAR 제품은 Garmin 사의 LiDAR-Lite v3HP(Fig. 3(c))를 사용하였으며, 해당 제품은 5 cm에서 40 m까지 거리 측정이 가능하고 약 2.5 cm의 정확도와 1 cm의 해상도를 갖는다. 본 연구에서는 LiDAR를 사용하여 상대적으로 원거리의 노면 상태와 위험요소를 사전에 파악하는 것을 목적으로 시스템을 구성하였다.
LiDAR를 이용하면 노면과의 거리를 측정함으로써 노면의 상태를 간접적으로 파악할 수 있지만, 차량에 가해지는 직접적인 영향을 정량화하기에는 진동을 측정하는 것이 더 직접적인 지표가 될 수 있다. 진동 값을 측정하기 위해서는 다양한 센서가 활용될 수 있으나, 본 연구에서는 스마트폰을 활용하기 때문에 스마트폰에 내장된 가속도 센서를 활용하여 진동을 측정하였다. 가속도 센서는 센서의 특정 축을 중심으로 X, Y, Z 방향으로의 가속도를 측정할 수 있다. 진동이 없을 때도 중력 가속도가 항상 작용하고 있으므로 취득한 가속도 데이터에 저역필터(Low-pass filter)를 적용하여 중력 가속도를 제거하고 진동 값을 정량화하였다. 또한, 각 센서에서 취득한 정보를 위치 정보와 함께 활용하면 지도 화면 가시화 및 다양한 해석이 가능하다. 본 연구에서는 차량의 위치 정보를 얻기 위해서 스마트폰에 내장된 GPS 센서를 활용하였다.
즉, 진동 측정 및 위치 측정 기능은 스마트폰에서 제공할 수 있으므로 이를 활용하였고, 스마트폰에서 제공할 수 없는 기능은 별도의 센서를 활용하여 정보를 얻도록 하였다. 이러한 센서들을 마이크로 컨트롤러인 Arduino Uno(Fig. 3(d))에 연결하여 실시간으로 현장 정보를 취득할 수 있도록 Arduino의 코드를 작성하였으며, 그 결과를 스마트폰으로 전송하기 위해서 Bluetooth 모듈인 HC-05 제품(Fig. 3 (e))을 사용하였다. 해당 제품은 일반적으로 10 m 이내의 거리에서 정상적으로 통신할 수 있다. Fig. 3(f)는 Arduino와 센서들을 결합하여 제작한 디지털 장치를 보여주고 있으며, 외형은 3D 프린터를 활용하여 제작하였다.
스마트폰을 이용한 데이터 공유 애플리케이션 개발
Arduino와 센서를 이용해 개발한 디지털 장치는 Bluetooth 모듈을 통해 분진 밀도, 가스 농도, 노면 상태 등의 값을 스마트폰으로 전송한다. 스마트폰에서 이러한 데이터를 전달받고 활용하려면 이를 위한 애플리케이션이 필요하다. 본 연구에서는 MIT에서 개발한 블록 코딩 프로그램인 App Inventor를 사용해서 Connected Mine이라는 명칭의 스마트폰 애플리케이션을 개발하였다. Connected Mine 애플리케이션의 동작 과정은 (1) 디지털 장치에서 전송하는 데이터의 취득, (2) 스마트폰 자체 센서의 데이터 취득, (3) 서버로의 데이터 전송, (4) 서버에 저장된 데이터 수신 등 크게 네 가지로 구분할 수 있으며, 그 목적은 외부 센서나 스마트폰에서 취득한 정보를 실시간으로 공유하고 지도에 가시화하는 것으로 요약할 수 있다.
더 구체적으로 설명하면 첫 번째로 디지털 장치에서 전송하는 데이터를 받기 위해서 스마트폰의 Bluetooth 통신 기능을 활성화해야 하며, 하나의 패킷(packet)으로 들어오는 여러 센서의 데이터를 구별하여 활용하기 위한 파싱(parsing) 작업이 필요하다. 두 번째로 스마트폰 자체에 내장된 가속도 센서를 이용해 진동 값을 계산하고 GPS를 이용해 위치 정보를 얻은 후에, 앞서 전달받은 외부 센서 데이터와 이를 결합하는 과정을 수행한다. 세 번째로는 계속하여 얻어지는 이러한 데이터를 실시간으로 서버로 전송하는 작업이 필요하다. 이때 어떠한 차량(스마트폰)에서 데이터를 보냈는지 기록하여 데이터를 전송한 주체를 구분할 수 있도록 하였다. 본 연구에서는 모바일 및 웹 애플리케이션 개발 플랫폼인 Firebase를 서버로 활용하였다. 마지막으로 서버에 업로드된 데이터를 실시간으로 조회하여 이를 스마트폰 화면의 지도에 가시화하는 작업을 수행하였다. 앞서 서버로 전송된 데이터는 센서 데이터를 비롯해 각 차량의 위치 정보를 포함하므로 실시간으로 움직이는 다른 차량의 위치를 지도에서 확인할 수 있도록 하였다.
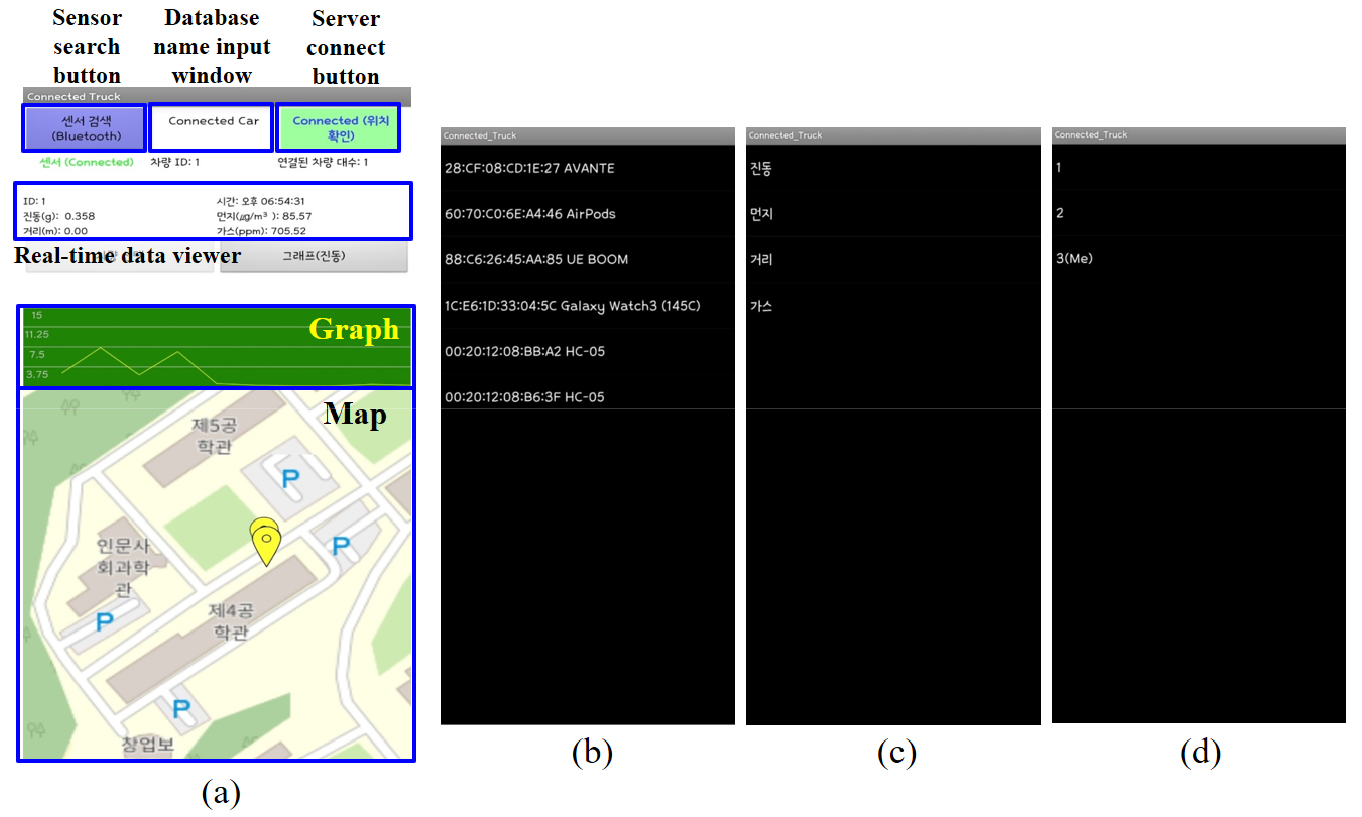
개발한 애플리케이션의 인터페이스 및 사용방식은 Fig. 4에 나타냈다. 애플리케이션 화면(Fig. 4(a)) 좌측 상단에 있는 센서 검색 버튼을 클릭하면 스마트폰과 연결 가능한 Bluetooth 모듈의 목록(Fig. 4(b))이 나타난다. 차량에 설치된 디지털 장치의 Bluetooth 모듈을 선택하면 디지털 장치에서 전송하는 센서 값들을 스마트폰에서 수신하고, 선택한 센서 값(Fig. 4(c))의 변화를 그래프로 확인할 수 있다. 이 상태에서는 스마트폰과 직접 연결된 센서 값만 수신하고 표시하는 것이며 다른 차량의 애플리케이션과 데이터를 공유하는 단계는 아니다. 화면 중앙 상단의 접속 태그 부분에 생성하고자 하는 데이터베이스 명칭을 입력하고 서버 연결 버튼을 클릭하면 Firebase 서버에 새로운 데이터베이스가 생성된다. 다른 차량과 데이터를 공유하기 위해서는 서로 다른 애플리케이션이 하나의 데이터베이스를 이용해야 하므로 동일한 접속 태그 명칭을 입력해야 한다. 다수의 차량이 동일한 데이터베이스에 접속해 있다면 차량 선택 버튼이 활성화되어 선택한 차량(Fig. 4(d))의 위치 정보와 센서 값을 조회할 수 있다. 스마트폰의 GPS 센서가 활성화되어 있다면 위치 정보 또한 공유할 수 있으므로 동일 서버에 접속한 차량들의 위치를 지도를 통해 가시화할 수 있다.
연구 결과
강원대학교 삼척캠퍼스 모의실험 결과
광산 현장 적용에 앞서, 개발한 디지털 장치를 RoboMaster S1 장비 2대에 부착하여 강원대학교 삼척캠퍼스 내에서 분진 밀도, 가스 농도, 진동 및 지면까지의 거리를 측정하고 이를 공유하는 모의실험을 수행하였다(Fig. 5(a)). DJI 사에서 개발한 RoboMaster S1은 영상 촬영 및 자율주행이 가능한 무선조종차량으로, 2축 기계식 짐벌, 메카넘 휠, 고성능 모터 등을 장착하고 Scratch, Python 프로그래밍 언어를 지원하는 첨단 AI 기술을 탑재하고 있다. 모의실험 장소인 강원대학교 삼척캠퍼스의 도로는 모두 포장되어 있으므로 일반 차량으로는 광산 현장처럼 노면상태가 안 좋은 환경을 모의실험하기에 어려움이 있다. 반면에 RoboMaster S1을 사용하면 노면의 굴곡이 심한 지형이나 비포장 경로에서도 실험을 수행할 수 있다는 장점이 있다. RoboMaster S1은 배터리를 내장하고 있으므로 개발한 디지털 장치의 전력은 별도의 배터리 설치 없이 RoboMaster로부터 공급받아서 장치를 가동하였다.
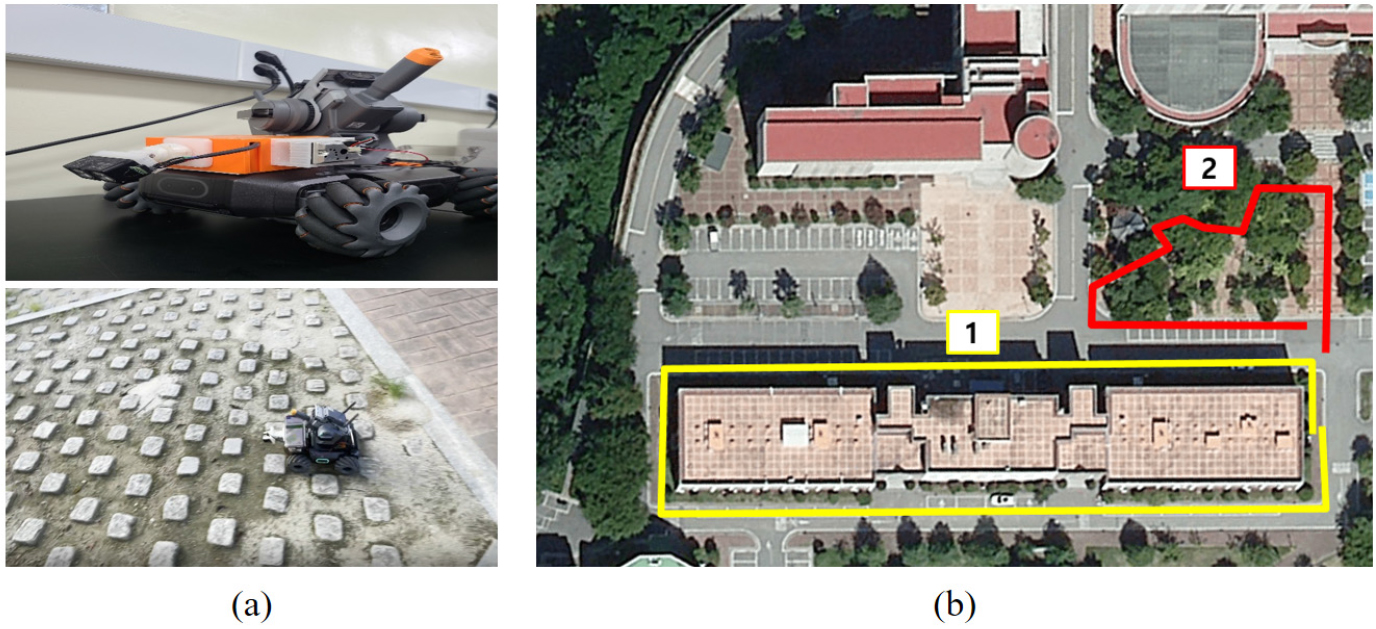
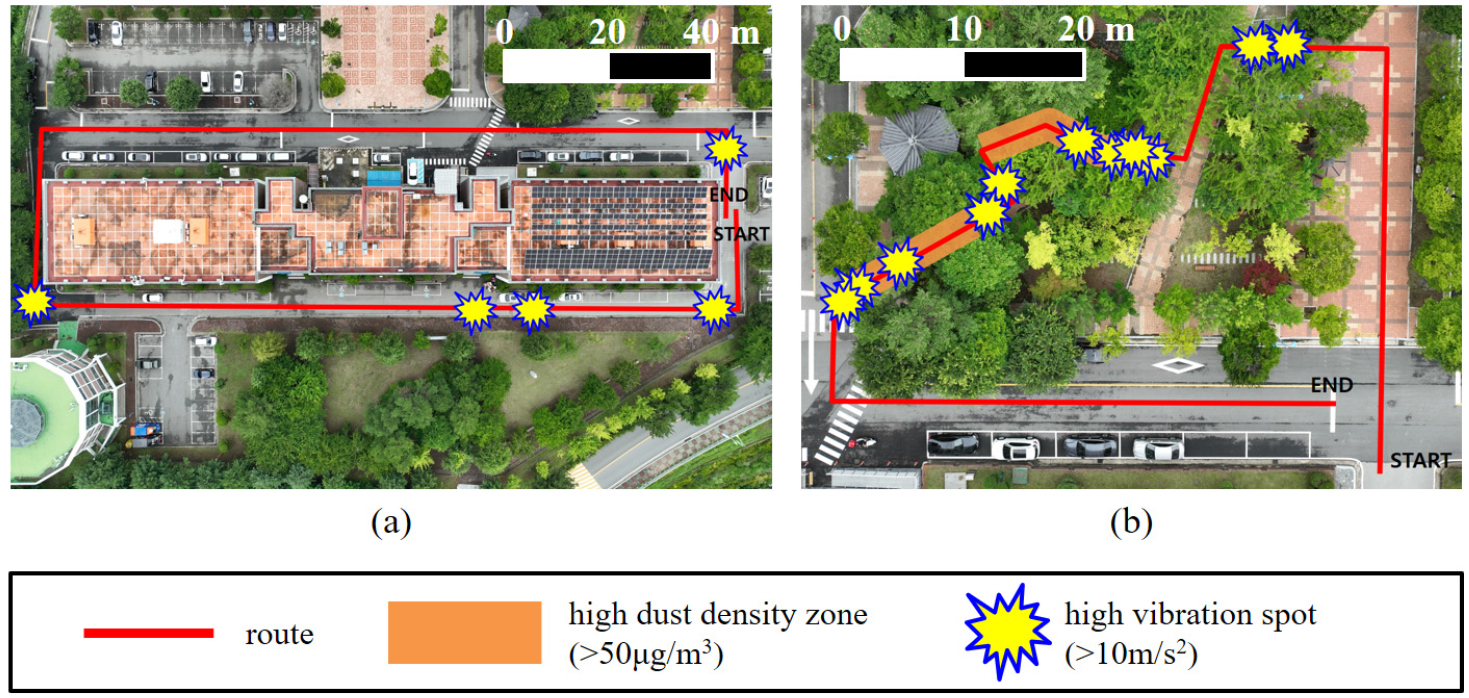
Fig. 5(b)는 강원대학교 내에서 사전실험을 위한 RoboMaster 장비 2대의 이동 경로를 보여주고 있으며, 다른 차량의 위치와 센서 측정값은 개발한 앱을 통해서 실시간으로 확인할 수 있다. 1번 경로는 상대적으로 평평한 포장도로 구간으로 되어 있으며, 2번 경로는 비포장 구간으로 상대적으로 노면이 울퉁불퉁한 경로에 해당한다. 또한, 2대의 장비에서 측정된 결과 중 진동과 분진밀도가 기준 값 이상의 값을 나타낸 지점을 Fig. 6에 나타냈다. 포장도로를 따라서 주행한 차량 1이 최대 10.3 m/s2의 진동 측정값을 보이는 반면, 상대적으로 노면 상태가 불량한 경로로 주행한 차량 2는 최대 21.7 m/s2의 진동 값이 관측되었다. 특히 비포장 지역에 들어섰을 때에는 심한 진동 변화가 나타났으며 기준 값(10 m/s2) 이상의 진동이 다수 기록되었다. LiDAR를 이용해 측정한 지면과의 거리는 차량 1에서는 0~14 cm의 범위를 보이는 반면, 노면이 불량한 구간을 지나는 차량 2는 0~21 cm의 상대적으로 심한 변화를 보였다. RoboMaster S1은 차체가 낮으므로 LiDAR를 사용할 때 근거리의 결과 값만 파악할 수 있지만, 차체가 큰 덤프트럭이나 중장비등에서는 더 원거리 측정에 활용될 수 있을 것이다. 분진밀도는 차량 1에서 최고 39 µg/m3, 최저 22 µg/m3로 나타났으며, 가스 센서는 변동이 크지 않고 대체로 일정한 값을 유지하였다. 차량 2의 분진밀도는 최고 98 µg/m3, 최저 14 µg/m3로 나타났으며, 흙으로 덮인 구간을 지날 때 분진밀도가 높게 기록되었다. 가스 센서는 차량 1과 마찬가지로 변동이 크지 않았다. 대체로 노면이 불량하고 먼지가 유발되는 비포장 경로에서 진동, 지면과의 거리, 분진밀도 값들의 변화가 크게 나타나는 것을 확인할 수 있었다.
광산 현장 실험 결과
개발한 시스템을 두 종류의 차량에 설치하여 삼도사업소 사무실에서 갱구까지의 경로를 따라 현장 실험을 수행하였다(Fig. 7). 센서 기반의 디지털 장치는 차량의 전면부에 부착하였고, 스마트폰은 차량 내부에 설치하여 운전자가 확인할 수 있도록 구성하였다. 차량은 디젤 트럭과 일반적인 세단 차량으로 구성하였는데, 차량의 높이 및 충격 감도가 달라서 실험 결과도 다르게 나타날 것으로 예상하였다. 경로를 따라 트럭이 먼저 출발하고 1분 후에 세단 차량이 출발하는 방식으로 실험을 진행하였으며, 각각의 스마트폰 화면에서 다른 차량의 움직임을 실시간으로 확인할 수 있었다. 실험을 진행한 경로에서는 가스 농도나 LiDAR 기반의 거리 변화는 유의미한 결과를 나타내지 않았으며, 본 연구에서는 진동 측정 결과와 분진 밀도를 위주로 그 결과를 제시하였다.
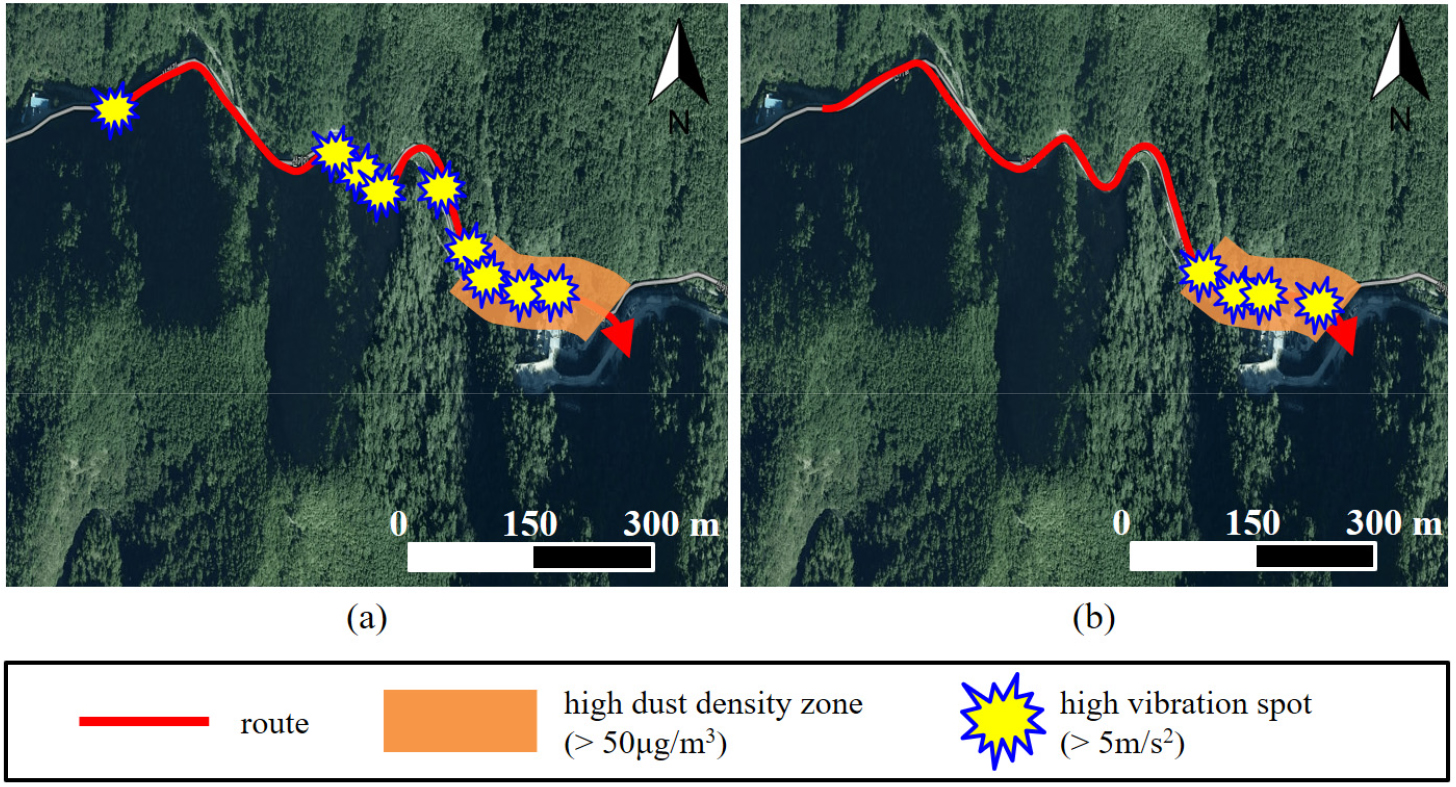
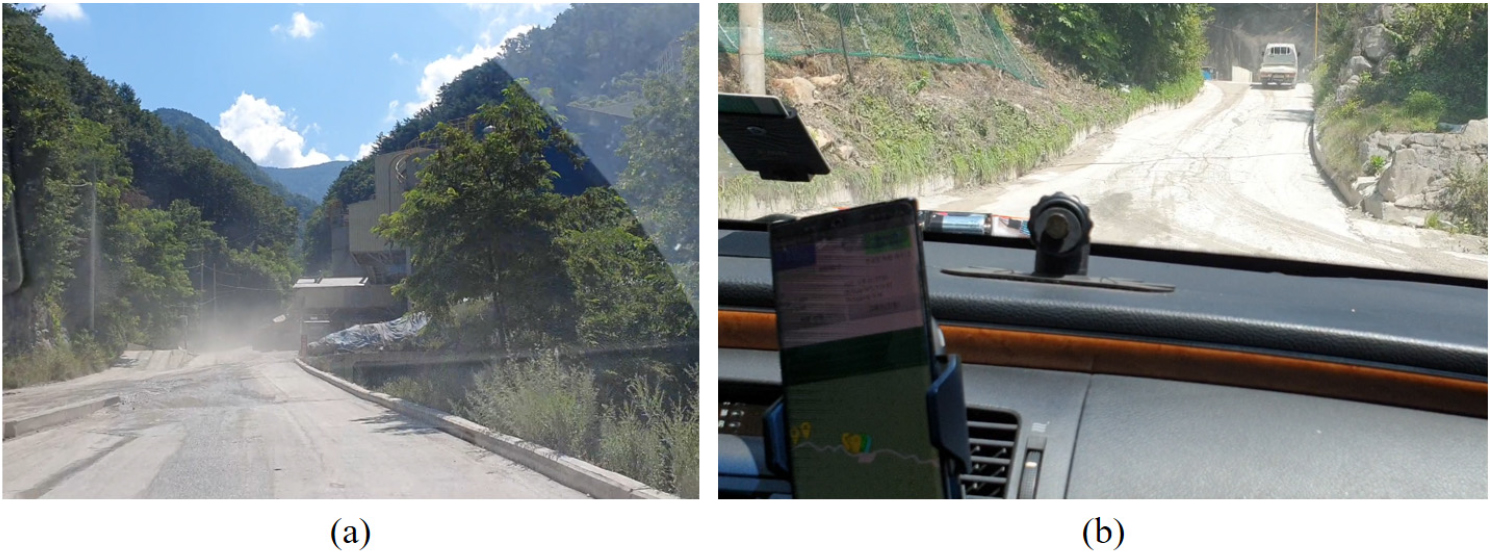
트럭은 해당 경로를 따라 이동하는 동안 기준 값(5 m/s2)을 초과하는 진동 값이 9차례 기록되었으며 세단은 4차례 기록되었다. Robomaster를 이용한 교내 실험에 비해서 실제 차량을 이용할 경우 더 안정적인 거동을 나타냈으며, 트럭보다는 세단의 진동이 더 작게 나타났다. 트럭과 세단 차량 실험에 대해 기준 값을 초과하는 지점을 각각 Fig. 8(a)와 Fig. 8(b)에 표시하였다. 높은 진동을 보이는 지점들은 대부분 갱구 수십 미터 앞에 분포하고 있으며, 특히 갱내에서 나온 차량의 세차시설 측면 주행로 주변(Fig. 9(a))과 현장 입구(Fig. 9(b))에서 높은 진동 값이 관측되었다. 이 지점은 실험 결과에서 알 수 있듯이 노면 상태가 좋지 않을 뿐 아니라 측면에 세차 장비가 위치하여 상대적으로 좁기 때문에 차량들이 서행할 필요가 있다. 나아가 해당 지점의 노면 상태를 개선한다면 차량들이 더 안정적으로 이동할 수 있을 것이다. 먼지 측정값 또한 출발지점인 사무실 근방에서는 대체로 낮은 값을 보이다가 세차 장비 주변 및 현장 입구에 가까워질수록 높게 나타남을 알 수 있다(Fig. 8). 이러한 이유는 갱구 주변부에 다수의 차량과 장비들이 밀집되어 있고, 세차 장비 주변에는 씻겨나간 분진이 도로 상단에 쌓여 있다가 차량이 지나갈 때 먼지바람을 일으키기 때문으로 생각된다. 이때 측정된 분진밀도는 최대 125 µg/m3로 나타났는데 이는 미세먼지(PM 10) 기준 농도로 볼 때 나쁨에 해당한다. 세단형 차량에 비해서 트럭이 이동할 때 더 높은 분진 밀도가 측정되었는데 이는 트럭이 이동할 때 주변에 더 많은 운반 차량들이 함께 이동했기 때문이다. 이처럼 분진 밀도는 주변 환경에 따라 계속해서 변하는 값이므로 특정 경로에 대한 전반적인 분진 분포를 파악하려면 지속적인 데이터 구축이 필요할 것이다.
결 론
본 연구에서는 다양한 센서가 결합된 디지털 장치를 차량에 부착하여 광산 현장의 환경을 모니터링하고 차량 간 정보를 공유할 수 있는 기술을 개발하였다. 먼지센서와 가스센서, LiDAR를 사용해 각각 광산 현장에서의 분진밀도, 가스농도, 노면상태를 관측하였고 스마트폰에 내장된 GPS와 가속도 센서를 이용해서 차량의 위치와 진동 값을 측정하였다. 디지털 장치에서 측정된 데이터는 블루투스 모듈을 통해 개발한 스마트폰 앱으로 전송되며, 앱을 통해 실시간으로 센서 값을 확인할 수 있도록 하였다. 각 차량에서 취득한 데이터를 서로 공유하기 위해서 Firebase 데이터베이스를 중간 매개체로 활용하였으며, 각각의 앱이 계속해서 자신의 데이터를 업로드하고 다른 앱의 데이터를 수신할 수 있도록 하였다. 개발한 시스템을 광산 현장에 적용하기 전에 강원대학교 삼척캠퍼스 내에서 무선조종차량인 RoboMaster S1을 이용해 모의실험을 수행하였으며, 노면 상태에 따라 측정된 데이터에 차이가 있는 것을 검증하였다. 광산 현장에서는 두 종류의 차량으로 운반 경로를 따라 실험을 진행하였고 승용차에 비해 트럭에서 더 큰 진동이 측정됨을 확인하였다. 차량의 진동은 갱구 주변에서 높게 나타났는데, 작업 차량이 밀집되는 곳이므로 일부 구간에 대해서는 노면 상태를 개선하거나 보다 주의를 요해야 할 것으로 판단된다. 작업 중에는 분진이 발생할 수밖에 없으므로 갱구 주변에서 분진 밀도가 상대적으로 높게 나타났으나, 대부분의 작업자들은 방진 마스크를 착용하고 차량 내에 있으므로 직접적인 유해성은 크지 않을 것이다. 다만 분진을 장기간 흡입하면 인체에 유해할 수 있으므로 차량 외부에서 작업 중인 작업자는 특히 주의 깊게 방진 마스크를 착용할 필요가 있다. 본 연구에서는 광산 현장에서의 작업에 방해가 되지 않도록 일반 차량에 개발한 시스템을 적용하였지만, 장기적으로는 시스템을 개선하여 다수의 현장 운반 차량에 적용할 계획이다. 이를 위해서는 배터리 시스템을 개선하여 차량의 전력을 사용할 필요가 있으며, 많은 차량이 시스템에 접속하여도 빠르게 데이터를 처리하고 공유할 수 있도록 데이터 처리 방식과 서버 시스템을 개선할 필요가 있다. 다수의 운반 차량들이 정보를 공유하고 데이터가 누적된다면 향후 빅데이터 분석을 통해 광산의 전체 영역에 걸쳐 더욱 신뢰도 있는 위험 영역 분석이 가능하리라 기대된다. 또한, 본 연구를 사물인터넷 기반의 갱내 통신 기술과 접목한다면 광산 내부에서도 차량의 위치를 파악하고 갱내 환경 정보를 취득할 수 있을 것이다.
