

서 론
자력계 위치 및 배열
고정형(fixed or rigid type)
비고정형(towed sensor or towed bird type)
멀티콥터의 위치 정확도
자료처리
신호 변환을 통한 멀티콥터 영향분석
잡음제거 기법
자료 해석
자력 이상도
단순 발생원으로 근사
기계학습 적용
결 론
서 론
자력탐사는 가장 오래전부터 수행되어 온 물리탐사 방법의 하나다. 특히, 유인 비행기나 헬기를 이용한 항공 자력탐사는 넓은 영역을 신속히 탐사할 수 있어 광역 지질조사나 광물자원 탐사에 많이 활용되고 있다(Taylor et al., 1968; Spector and Lawler, 1995; Amigun et al., 2012; Kim et al., 2021). 그러나 유인항공기를 임대하려면 고가의 비용을 지불해야 할 뿐만 아니라 이착륙장 섭외 및 허가, 조종사의 안전 문제 등의 복잡한 문제가 있어 그 활용이 제한적이다. 한편 지표 자력탐사의 경우, 고해상도의 자료를 얻을 수 있고 신호의 크기도 세기 때문에 작은 대상까지 탐지할 수 있다는 장점이 있지만 항공 자력탐사와 비교하여 탐사할 수 있는 영역이 매우 좁고 사람이 접근하지 못하는 영역은 탐사할 수 없다는 한계가 있다(Døssing et al., 2021).
최근 안정적으로 기술이 발전한 무인비행장치(unmanned aerial vehicle)에 기반한 자력탐사의 경우, VTOL(vertical take off/landing)이나 STOL(short take off/landing)을 접목해 이착륙에 대한 제약이 거의 없고, 비행 허가도 간편하다는 장점이 있다. 무인 지상 제어 시스템을 이용하기 때문에 조종사의 안전 문제가 발생하지 않고, 유인항공기나 사람이 접근하기 힘든 환경에서도 운용할 수 있다(Kim, 2020). 무인비행장치 대부분이 배터리를 사용하므로 연료에 대한 추가적인 비용이 들지 않는다는 장점도 있다. 또한 추가적인 배터리 사용이나 휴대용 배터리 충전 시스템의 활용이 가능해짐에 따라 비행시간에 대한 제약 역시 줄어들고 있다.
최근까지 수행된 무인비행장치 기반의 자력탐사 연구를 전문학회의 논문집, 학술발표회 등의 자료 중심으로 연도별로 정리한 결과(Fig. 1)를 보면(현재 기술개발 중이거나 현업에서 활용 중인 기술에 관한 사례는 누락이 될 수 있음), 2016년 이후, 무인비행장치 기반 자력탐사 시스템에 관한 활발한 연구가 진행되었다. 초기에는 무인헬기, 무인비행선, 무인비행기 등 다양한 무인비행장치와 자력계를 조합하여 탐사 가능성을 확인하는 연구가 주를 이루었다면, 2020년 이후에 개발된 시스템들은 대부분 무인멀티콥터를 활용하여 연구가 수행되고 있음을 확인할 수 있다.
특히, 자동 비행 시스템에 기반한 무인멀티콥터의 정밀 비행이 가능해져 지표에 가까이 접근하여 탐사를 수행할 수 있으며, 이에 따라 고해상도 자료로부터 천부의 작은 이상체를 규명하기 위한 연구가 진행되고 있다. 천부 자료 획득 시 자력계의 위치 정확도 및 해상도 높은 자료에 대한 필요성이 높아지고 있으며, 이를 위해 자력계의 설치 위치와 배열의 다양화, 자력탐사 자료 분석 및 잡음 처리 기술, 자료 해석 기술 등에서 새로운 시도들이 진행되고 있음을 확인할 수 있다.
무인멀티콥터 기반 자력탐사는 효율적으로 고해상도 자료를 얻을 수 있는 탐사 방법으로 가능성을 높이 평가받고 있고, 많은 연구자에 의해 활발히 연구가 수행되고 있다. 이 논문에서는 2020년도부터 활발히 연구 결과가 나오고 있는 천부 자력탐사 사례를 중심으로 자력계의 설치 위치 및 여러 개의 자력계 배열을 사용하는 사례들을 소개하고 무인멀티콥터의 위치 정확도를 높이기 위한 시스템 구성을 비교 분석한다. 다음으로 멀티콥터를 고려한 자료 분석 및 처리기법에 관한 연구사례를 설명한다. 마지막으로 천부 이상체 탐지를 위한 해석 사례를 분석하고 관련 내용에 대해 정리하고자 한다.
자력계 위치 및 배열
무인멀티콥터를 이용한 천부 자력탐사 연구가 활발히 진행되면서 잡음에 대한 영향을 최소화하거나 해상도를 향상하고 안정적인 자료를 획득하기 위해 다양한 방식으로 자력계의 위치 및 배열을 설정하는 연구들이 진행되고 있다. 멀티콥터에 자력계를 부착하는 방식은 크게 고정형(fixed or rigid type)과 비고정형(towed sensor or towed bird type)으로 분류할 수 있다. 고정형의 경우, 멀티콥터 본체 또는 착륙장치(landing gear)에 자력계를 고정하여 장착하는 형태로 모터 및 본체 움직임에 따른 간섭신호가 들어오는 단점이 있어 이러한 영향을 정확히 제거하기 위한 연구가 필요하다. 반면, 자력계가 고정되어 있으므로 비행하는 동안 자력계의 정확한 위치를 알 수 있다는 장점이 있다. 한편, 비고정형의 경우, 멀티콥터 본체로부터 거리를 띄워 자력계를 매달고 비행하는 형태로 모터 및 본체 움직임에 따라 발생하는 잡음의 영향을 받지 않는 최적의 거리까지 자력계를 띄워 장착하는 형태이다. 최적의 거리를 찾기 위해 다양한 연구들이 진행된 바 있으며, 3 m~5 m 정도의 거리에서 안정적인 결과를 얻을 수 있었다는 연구 결과를 찾아볼 수 있다(Parvar, 2016; Malehmir et al., 2017; Parvar et al., 2018; Walter et al., 2019a; Accomando et al., 2021; Kolster et al., 2022). 하지만, 사용하는 멀티콥터마다 다양한 크기 및 재질로 구성되어 있어 발생하는 잡음의 영향이 다르고 사용하는 자력계의 민감도가 다르므로, 비고정형을 사용할 경우, 사용하는 멀티콥터와 자력계 사이의 최적 거리를 찾기 위한 사전 실험이 필요할 것으로 판단된다. 또한 비고정형의 경우, 비행 시 자력계의 흔들림에 따른 신호의 주기적 변동으로 인한 잡음을 보정하는 방법에 대한 고찰이 필요하며, 비행 중 자력계의 위치를 정확하게 파악하기 위한 연구가 필요하다. 이 논문에서는 2020년부터 개발된 천부 자력탐사 시스템 중 기존의 일반적인 무인멀티콥터 자력탐사 시스템과 다른 특징을 가진 시스템만을 선별하여 정리하였다.
고정형(fixed or rigid type)
기존에 연구되어 온 멀티콥터를 이용하는 자력탐사 시스템의 경우, 비고정형이 높은 비율을 차지하던 것으로 파악되나, 최근 천부 탐지 시의 정밀한 비행을 위한 고정형 시스템에 관한 연구도 진행되고 있음을 확인하였다.
2020년 천부 대상 탐지를 위해 두 개의 세슘 광학 펌핑 자력계(optically pumped Cs magnetometer)를 0.3 m 간격으로 띄우고 멀티콥터 바로 아래에 장착하는 시스템(Fig. 2)이 개발되었다(Mu et al., 2020). 연구에 사용된 멀티콥터는 8개의 로터를 사용하는 DJI社의 MG1이며, 사용된 자력계는 중국의 Aerospace Information Research Institute에서 설계한 경량 소형 자력계이다. 샘플링 주파수는 160 Hz이고, 차폐된 공간에서 자력계의 잡음 민감도는 0.6pTrms√Hz@1 Hz이며, 센티미터 수준의 정확도를 가지는 GPS를 사용하여 정확한 위치 정보를 활용하였다. 이 연구에서는 두 개의 자력계를 이용하여 멀티콥터로 인한 간섭신호를 효과적으로 제거하는 방법을 제안하였다. 추가적으로 천부 이상체의 위치를 더 정밀하게 탐지하기 위해 2020년에 소개된 멀티콥터 자력탐사 시스템과 카트를 이용한 시간영역 전자탐사 시스템(cart-mounted time domain electromagnetic system)을 함께 활용하는 연구를 수행한 바 있다(Mu et al., 2021).
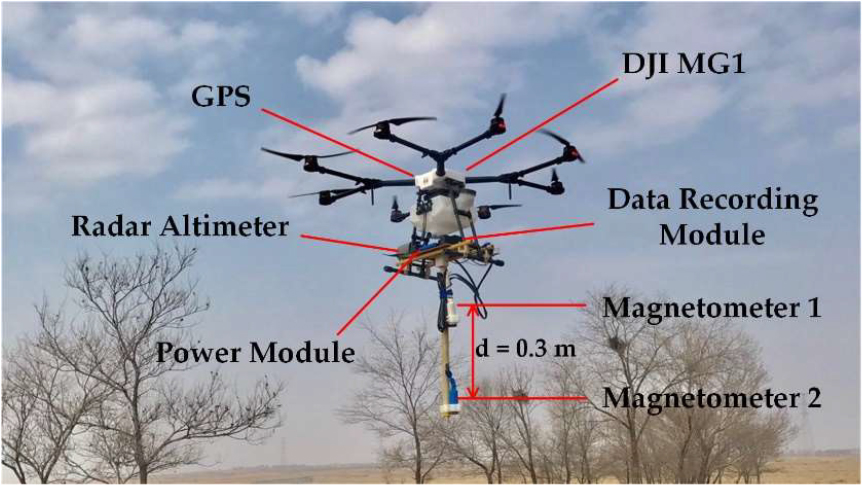
Fig. 2.
Unmanned Aerial Vehicle (UAV)-magnetometer system, carrying two magnetometers, radar altimeter, GPS, data recording and power module. The top magnetic sensor is labelled as magnetometer 1 and the bottom magnetic sensor is labelled as magnetometer 2 (Mu et al., 2020).
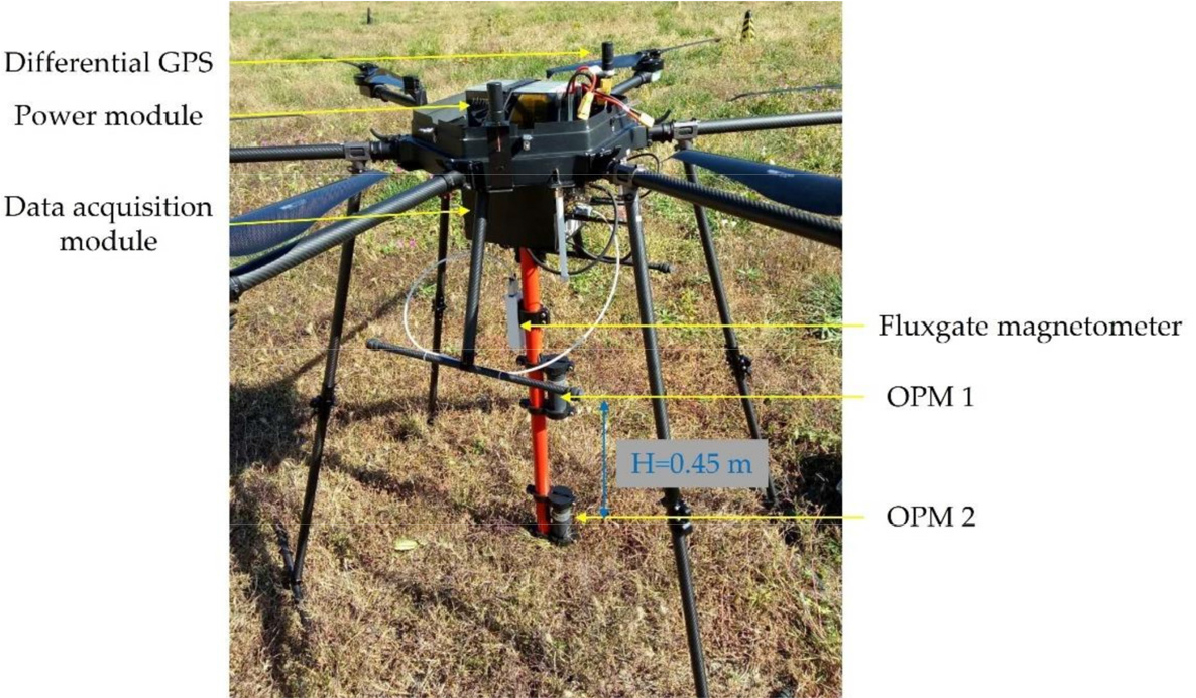
또한, 이착륙 시 자력계의 안정성을 높이기 위해, Mu et al.(2020)에서 개발된 시스템과 유사하나, 멀티콥터가 변경되고 자력계 사이의 거리는 0.45 m로 늘어난 시스템(Fig. 3)이 개발된 사례를 찾아볼 수 있다(Zheng et al., 2021). 이 장비는 스칼라를 측정하는 광학 펌핑 자력계 상부에 벡터를 측정하는 플럭스게이트 자력계(fluxgate magnetometer)를 추가로 배치하였다. 이 장비로 수행한 연구에서는 주로 자료처리 방법에 대해 논의하였고, 시스템의 특성을 이용하여 개선된 결과를 얻은 정보는 찾아볼 수 없었다.
멀티콥터에서 발생하는 전자기적 신호의 영향에 관한 연구를 위해 두 가지의 시스템(Fig. 4)을 고안하여 비교 연구한 사례도 있다(Accomando et al., 2021). 첫 번째 시스템은 멀티콥터 모터로부터 0.5 m 떨어진 착륙장치에 자력계를 부착한 형태이며, 두 번째 시스템은 멀티콥터로부터 3 m 아래에 비고정형으로 부착한 형태이다. 자력계는 주로 비고정형으로 많이 사용되고 있는 Geometrics社의 MFAM (Micro-Fabricated Atomic Magnetometer)를 개발 도구로 사용하였다. 이 연구를 통해 고정형과 비고정형 자료의 특성을 파악할 수 있으며, 고정형 자료로부터 자료처리를 통해 비고정형과 유사한 자료를 도출하는 방법을 확인할 수 있다.
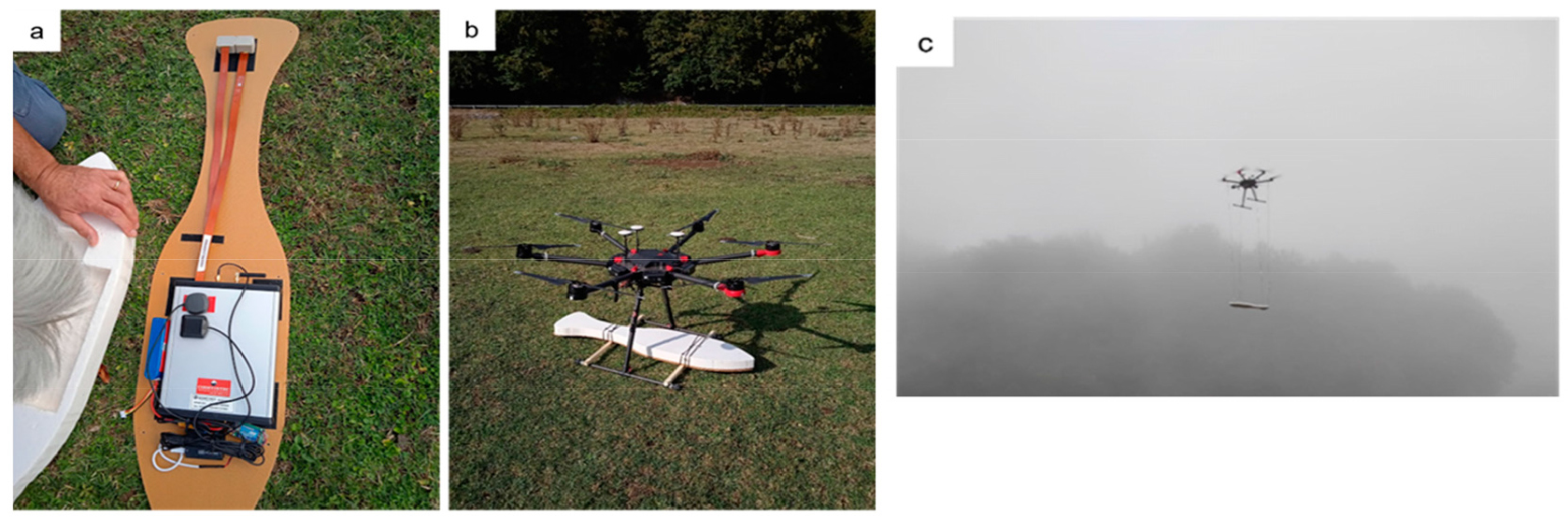
Fig. 4.
(a) Arrangement of the GEOMETRICS MFAM “Development kit” magnetometer inside the bird; (b) first flight configuration (F0.5), with the magnetometer fixed to the UAV landing sled, 0.5 m below the platform; (c) second flight configuration (F3.0), with the magnetometer suspended 3 m below the UAV (modified from Accomando et al., 2021).
국내 사례로서, 지뢰탐지를 위한 멀티콥터 자력탐사 시스템이 50 Hz 샘플링 주파수를 가지는 3축 플럭스게이트 자력계를 이용하여 개발되었다(Yoo et al., 2020). 멀티콥터 모터의 영향을 확인하기 위하여 자력계를 멀티콥터로부터 10 cm와 70 cm만큼 떨어뜨려 설치한 후 주파수 성분 분석을 시행하였다. 이 연구에서는 모터로부터 70 cm 떨어뜨렸을 때, 20 Hz이상에서 50 dB 이상 잡음의 진폭이 감소함을 확인하였고, 떨어진 거리에 따른 진폭의 감소가 모터로 인해 발생하는 자기장을 자기 쌍극자에 의한 것으로 가정하여 계산한 결과와 정량적으로 일치함을 확인하였다.
최근까지의 연구사례들을 분석한 결과, 고정형 시스템들의 경우 멀티콥터 본체와 자력계의 사이의 거리가 가까우므로, 멀티콥터로 인해 발생하는 잡음을 제거해야만 안정적인 자료 획득이 가능함을 확인하였다. 한편 멀티콥터의 비행 자유도가 확연하게 높아지므로 멀티콥터로부터 발생하는 잡음을 효과적으로 제어한다면 향후 천부 탐지 시스템으로 활발하게 활용될 것이라고 기대된다.
비고정형(towed sensor or towed bird type)
자력계와 멀티콥터의 거리가 멀어질수록 멀티콥터 본체로부터 발생하는 잡음의 영향은 작아질 수 있으나(Parvar, 2016; Malehmir et al., 2017; Parvar et al., 2018; Walter et al., 2019a; Accomando et al., 2021; Kolster et al., 2022), 비행 시 흔들림 등의 문제는 더 커질 수 있다(Walter et al., 2019b; Walter et al., 2020). Walter et al.(2019a)은 지질학적 환경에서 흔들림으로 인해 발생하는 자기장 변화가 0.5 nT 이하라고 소개한 바 있다. 하지만, 불발 병기(unexploded ordnance)와 같은 천부 대상을 탐지할 경우, 이 변화 범위는 무시할 수 없을 뿐만 아니라 여러 자력계를 이용하는 경우 서로 다른 영향이 나타날 수 있다는 문제점이 있다. 또한 흔들림에 의한 잡음은 탐지 대상과 주파수 대역이 겹칠 수 있으므로 기존에 사용되었던 저주파 통과 필터(low-pass filter)와 같은 자료처리 기법이 바로 적용될 수 없다. 이러한 이유에서 수직적으로 배열된 두 개의 자력계를 이용하는 비고정형 시스템을 활용하여 자력계의 위치 변화와 관계없이 이상체의 위치를 해석하는 방법에 대한 연구가 수행되었다(Kolster and Døssing, 2020). 그 후 세 개의 자력계를 이용하여 대상의 위치를 파악하려는 방법이 제안되었다(Kolster et al., 2022). 역삼각형 모양으로 세 개의 자력계를 멀티콥터 본체에서 10 m 아래에 배열한 형태로 각 자력계 사이의 거리는 1 m이고, 다양한 자력계의 조합을 이용하여 최적의 배열을 찾기 위한 비교 분석을 시행하였다. 분석 결과, 수평 배열의 자력계를 이용하는 것이 수직 배열을 이용하는 것보다 비효율적임을 확인할 수 있었으며, 세 개의 자력계를 모두 사용하여 해석하는 것이 가장 좋은 결과를 도출함을 확인하였다. 또한, 역삼각형으로 배열한 세 개의 자력계를 사용할 경우, 측선 간격이 수평 배열의 간격과 일치할 때 탐사 효율성을 100% 늘릴 수 있다고 소개하고 있다.
국내의 경우, 모터로부터 자력계를 70 cm 떨어뜨려 설치한 시스템(Yoo et al., 2020)을 개발한 이후, 이착륙 시 안정성을 높이고 모터로부터 발생하는 간섭신호를 줄이기 위해 착륙장치로부터 50 cm 아래에 매달고 비행하는 시스템(Yoo et al., 2021) 개발에 관한 연구가 진행되었다.
현재까지 광물 탐사 등 많은 분야에서 활용됐던 비고정형 시스템의 경우, 멀티콥터로부터 발생하는 잡음의 영향이 최소화되어 보다 안정적인 결과를 얻을 수 있었지만, 수 미터의 천부 이상체를 탐지하는 경우 비행 안전에 있어 제약이 있을 수 있다. 특히, 다양한 시스템 배열을 이용하여 탐사의 정밀성을 높이고자 하는 연구들이 진행되었으나, 현재까지 소개된 시스템들은 고정형과 비교해 비행의 안전 측면에서 멀티콥터의 운용이 까다로울 것으로 판단된다.
멀티콥터의 위치 정확도
천부 이상체 탐지 연구사례에 따른 자력계의 고도, 측선 간격, RTK GPS(real-time kinematic global positioning system) 시스템 및 레이저 고도계의 설치 여부를(Table 1) 보면, 대부분에서 자력계 고도는 지표로부터 5 m 이하이며, 측선 간격은 1 m 내외이다. 이는 멀티콥터 및 자력계의 높은 위치 정확도가 필요하다는 것을 의미하며, 이를 위해 최근 몇몇 사례에서 RTK GPS 및 레이저 고도계가 사용되고 있다. 따라서 향후 천부 이상체 탐지용 무인멀티콥터 기반 자력탐사 시스템을 개발할 경우, RTK GPS 또는 레이저 고도계의 탑재에 대한 고려가 필요할 것으로 보인다.
Table 1.
Summary of survey parameters and sensor information used in each study
| Author, Publication Year | Altitude of magnetometer (m) | Line spacing (m) | RTK GPS | Laser altimeter |
| Stoll, 2013 | - | 1 | X | X |
| Kolster and Døssing, 2020 | 1 | - | O | X |
| Mu et al., 2020 | 2 | 0.5 | X | X |
| Nikulin et al., 2020 | 3 | 3 | O | X |
| Schmidt et al., 2020 | 0.5, 1.3, 2.2 | 1 | O | O |
| Yoo et al., 2020 | 1, 2, 3 | 3 | O | O |
| Accomando et al., 2021 | 8 | 4 | X | X |
| Mu et al., 2021 | 2 | 0.5 | O | X |
| Yoo et al., 2021 | 1, 2, 3 | 1 | O | O |
| Zheng et al., 2021 | 3.5 | 0.5 | X | X |
| Kolster et al., 2022 | 4~5.5 | 2 | O | X |
| Mukherjee et al., 2022 | 2~12 | - | - | - |
| Zheng et al., 2022 | 2 | 0.75 | X | X |
자료처리
무인멀티콥터 기반 자력탐사에 관한 많은 연구가 축적되었지만, 아직 자료에 대한 충분한 이해가 부족하며 이와 연관된 자료처리 기법에 관한 연구가 필요한 상황이다. 기존의 무인멀티콥터 자력탐사 사례의 경우, 비고정형으로 멀티콥터와 자력계를 떨어뜨려 설치함으로써 멀티콥터에 의한 영향을 최소화한 자료에 간단한 필터링 적용 후 해석을 수행하는 연구가 주를 이루었다(Malehmir et al., 2017; Parshin et al., 2018; Walter et al., 2019a). 그러나 자력계를 멀티콥터로부터 멀리 떨어뜨릴수록 비행 시 자력계의 흔들림으로 인한 영향이 커지고 자력계의 위치 정확도도 떨어지게 된다. 따라서, 천부를 대상으로 한 정밀한 탐사에서는 자력계를 멀티콥터에 가깝게 설치하여 안정적으로 비행하여 탐사하려는 연구가 시도되고 있다. 멀티콥터의 모터 등에서 발생하는 간섭신호를 분석하고 효율적으로 제거하려는 시도가 수행되고 있으며, 특히 신호 대 잡음비가 낮은 자료를 다루어야 하는 상황에서 신호를 보존하며 잡음만을 효율적으로 제거하는 기술에 관한 연구들이 활발히 진행되고 있다(e.g., Mu et al., 2020; Zheng et al., 2021; Kolster et al., 2022; Zheng et al., 2022).
신호 변환을 통한 멀티콥터 영향분석
잡음만을 효과적으로 분리하기 위해서는 잡음과 신호의 특성을 정확히 분석해야 한다. 기존의 주파수 영역에서 자료의 특성을 분석하여 필터를 적용했던 연구와 달리 최근에는 다양한 변환을 통해 잡음의 특성을 자세히 분석하고자 하는 연구를 찾아볼 수 있다.
전자기장을 활용하는 탐사에서 멀티콥터로 인해 생기는 전자기적 간섭신호(electromagnetic interference signal)를 분석한 대표적인 Walter et al.(2021)의 연구에서는 멀티콥터의 동력을 제공하는 영구 자석 동기 모터(permanent magnet synchronous motor, PMSM)로 인해 고유의 주파수를 가진 여러 개의 간섭신호가 발생함을 실험적으로 확인하고 발생 원인을 분석하였다. 멀티콥터로 인한 간섭신호의 주파수 대역과 멀티콥터 기반 지표레이더탐사, 전자탐사, VLF 탐사의 송수신 주파수 대역, 대표적인 이상체의 주파수 대역, 그리고 임무장비(payload)의 흔들림으로 인한 신호의 주파수 대역을 정리해 볼 수 있다(Fig. 5). 먼저, 멀티콥터로 인한 간섭신호는 크게 세 종류로 분류되며, 각각 모터의 기계적 회전에 의한 신호(FMR), 영구 자석 또는 영구 자석 쌍에 의한 신호(FPM), 영구 자석에 의해 전기자(armature)에 유도되는 신호(FIMF)이다. 세 신호의 주파수는 모터의 구조에 의해 결정되며, 보통 수십에서 수천 헤르츠(Hz)의 범위를 가진다. 따라서, 탐사 대상인 지질학적 자력 이상체(~1 Hz)나 불발 병기(0.1~2 Hz)의 주파수 대역과 비교하여 매우 높은 주파수를 보이므로 적절한 자료처리 기법을 통해 제거될 수 있음을 보여주었다.
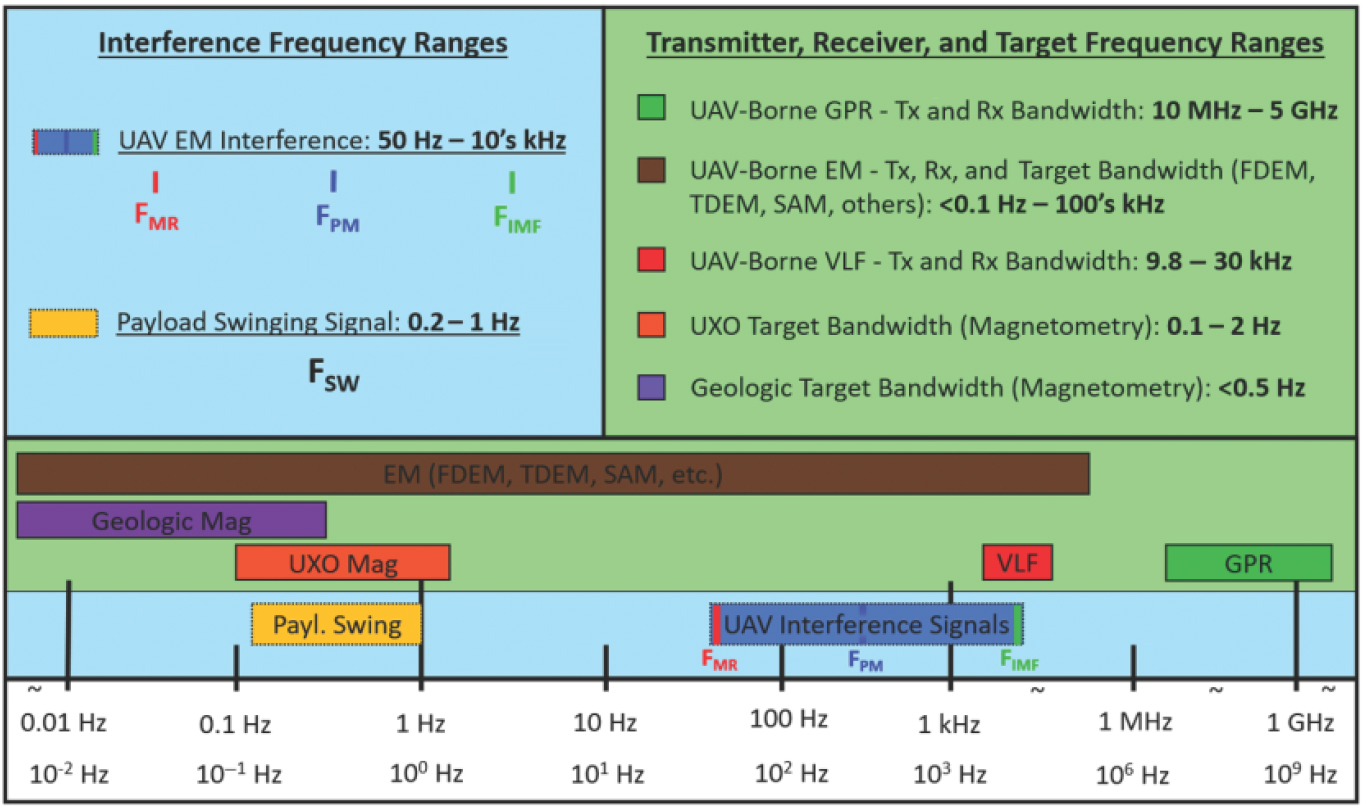
Fig. 5.
Characterized UAV-borne interference signal frequencies (FMR, FPM, FIMF, and FSW) superimposed with the transmitter, receiver, and standard target frequency ranges of typical UAV-borne magnetic, electromagnetic (e.g., time domain, frequency domain, very low frequency), and ground-penetrating radar surveys (Walter et al., 2021).
다만, 천부 대상 탐사에서 주의해야 할 점은 비고정형 시스템 자력계의 흔들림으로 인한 잡음의 주파수 대역이 불발 병기와 같은 인공 구조물의 주파수 대역과 유사할 수 있다는 것이다. 그러므로, 천부 이상체에 의한 신호가 자력계의 흔들림에 의해 왜곡될 수 있음을 인지해야 하며, 안정적인 비행을 통해 흔들림을 최소화하는 것이 중요하다는 것을 확인하였다.
동일한 자력계를 멀티콥터로부터 0.5 m에 고정하여 획득한 자료와 3 m에 비고정형으로 장착하여 획득한 자료를 비교 분석한 사례(Accomando et al., 2021)에서 주파수 영역 분석 결과를 확인할 수 있다. 이 연구를 통해 멀티콥터로부터 발생하는 잡음의 특성을 확실하게 관찰할 수 있는데 0.5 m에 장착한 고정형 시스템의 경우, 3 m에 장착한 비고정형 시스템과 비교하여 고주파 잡음(최대 진폭 약 10 nT)이 함께 기록된 것을 확인할 수 있었다. 시간과 주파수 변화에 따른 잡음의 변화를 확인할 수 있는 파형 변환 기법(wavelet transform)을 적용한 결과, 비행 방향에 따라 진폭 변화가 발생함을 확인할 수 있었다. 이는 자력계의 방향에 따라 값이 차이가 발생하는 자력계의 고유한 특성으로 멀티콥터로 인한 영향이 커질수록 진폭이 커짐을 알 수 있다. 이러한 분석 결과는 향후 멀티콥터로부터 발생하는 잡음을 제거하기 위한 기술 개발 시 도움이 될 것으로 보인다.
잡음제거 기법
기존에 잡음제거를 위해 필터링 기법을 적용한 연구들이 많았으며(e.g., Malehmir et al., 2017; Parshin et al., 2018; Walter et al., 2019a), 최근 연구에서는 다양한 시도들이 이루어지고 있지만, 여기서는 잡음 제거 기법들에 대해 크게 필터링 기법, 경험적 모드 분해법, 모델 기반 기법이라는 세 가지로 분류하여 정리하였다.
필터링 기법(filtering method)
일반적으로 배경 잡음을 제거하기 위하여 많이 사용되는 방법으로, 전력선이나 주변 건물에 의해 발생하는 고주파 잡음을 제거하기 위한 저주파 통과 필터와 탐사 지역의 공간적 지구자기장 변화를 제거하기 위한 기법 등을 나타낸다. 필터링 기법을 적용한 사례들을 정리해보면, 10 Hz의 차단 주파수(cut-off frequency)를 갖는 저주파 통과 필터를 적용하여 자력계의 흔들림에 따른 영향을 보정하고 이동평균법을 이용하여 공간적인 변화를 제거한 사례(Yoo et al., 2021)를 찾아볼 수 있다. 이와 유사하게 고주파수의 간섭신호를 제거하기 위해 3 Hz의 차단 주파수를 갖는 저주파 통과 필터를 적용한 후, 지구자기장에 의한 공간적인 변화를 제거하기 위한 추세 제거 기법(detrending method)을 적용한 연구(Mu et al., 2020)도 있다.
탐지 대상 신호와 관련된 주파수 대역을 찾기 위하여 멀티콥터의 속도(2 m/s)와 이상값의 수평 범위(신호의 반 파장)의 비율을 2로 곱한 값을 평가한 연구(Accomando et al., 2021)가 있다. 이 연구에서는 이상체에 의한 자력 이상이 15 m ~ 25 m의 반 파장을 보이기 때문에 0.04 Hz ~ 0.06 Hz 사이의 대상 신호 주파수 대역을 추정할 수 있었다. 이러한 분석을 바탕으로 0.5 Hz의 차단 주파수를 갖는 시간 영역 해닝 윈도우(Hanning-window) 저주파 통과 필터를 이용하여 대상 주파수 신호를 보존하면서 잡음을 효과적으로 제거하였다. 하지만, 멀티콥터와 자력계의 거리가 가까울 경우, 일반적으로 비행 속도는 주파수 영역 상에서 잡음과 신호를 안정적으로 분리를 할 수 있을 만큼 느려야 하며, 방위각 오차(heading error)를 고려하여 180도 회전 없이 비행하는 것을 추천하고 있다. 또한, 이 연구의 실험지역의 경우, 탐사 이상체가 강한 자기 신호를 보여 안정적인 필터링 결과를 얻을 수 있었다. 유적지나 일부 광산에 적용 시 자력 이상이 약한 천부 이상체를 탐지할 경우, 단순 필터링만으로는 깨끗한 신호를 얻기 어려울 수 있음을 시사하고 있다.
필터링 기법의 경우, 차단 주파수와 같은 필터 변수를 결정할 때 사전 정보가 필요하며, 대상 신호의 주파수 특성이 멀티콥터의 비행 속도와 같은 조건에 따라 변화한다. 또한, 대상 신호와 잡음의 주파수가 겹치게 되면 필터링 기법을 적용하기 어렵다는 한계가 있다.
경험적 모드 분해법(empirical mode decomposition, EMD)
경험적 모드 분해법은 신호를 물리적으로 의미 있는 구성 요소로 분해하여 분석하는 방식으로 비선형적(non-linear)이고 고정적이지 않은(non-stationary) 신호 처리를 위해 많이 사용되는 분석 기법이다(Huang et al., 1998). 멀티콥터 기반 자력탐사 자료의 잡음을 효율적으로 제거하기 위하여 경험적 모드 분해법, Permutation Entropy(PE), 상관 계수(correlation coefficient), 파형 문턱값 잡음제거(wavelet threshold denoising) 기법을 적용한 연구사례를 찾아볼 수 있다(Zheng et al., 2021). 이 연구에서는 경험적 모드 분해법의 한계를 보완하기 위해 Torres et al.(2011)에 의해 제안된 CEEMDAN(complete ensemble EMD with adaptive white noise) 기법을 사용하여 원시 자료를 서로 다른 크기의 내재모드함수(intrinsic mode function, IMF)로 분해하였다. 내재모드함수들은 PE의 값을 기준으로 다음과 같이 4개의 카테고리로 분류된다: 잡음의 내재모드함수(noise IMFs), 잡음이 지배적인 내재모드함수(noise-dominant IMFs), 신호가 지배적인 내재모드함수(signal-dominant IMFs), 신호의 내재모드함수(signal IMFs). 이 중 잡음의 내재모드함수는 제거되고, 실제 신호의 내재모드함수와 신호가 지배적인 내재모드함수 사이의 상관 계수를 계산하여 실제 신호가 지배적인 내재모드함수를 찾는다. 찾아진 실제 신호가 지배적인 내재모드함수는 파형 문턱값 잡음제거 기법을 적용하여 고주파수 대역에 존재하는 잡음을 제거한 후, 신호 내재모드함수와 합쳐져 최종적으로 잡음이 제거된 자료를 얻게 된다. 제안된 기법을 통해 잡음을 효율적으로 억제하고 보다 명확한 목표 신호를 얻을 수 있음을 보여주었다. 하지만, 처리 과정이 다소 복잡하고 분리된 내재모드함수들이 가지는 물리적 의미가 불명확하다는 한계를 보인다.
이후, 앞서 개발된 기법의 한계를 개선하고자 변동 모드 분해법(variational mode decomposition)이 적용되었다(Zheng et al., 2022). 변동 모드 분해법은 Dragomiretskiy and Zosso(2013)에 의해 제안된 방법으로 경험적 모드 분해법보다 잡음에 민감하지 않으며, 탄성파 시간-주파수 분석이나 특징 추출 등에 사용되고 있다(Liu et al., 2016; Li et al., 2017). 변동 모드 분해법을 적용한 결과, 내재모드함수의 수를 상당히 줄일 수 있었으며, 각각의 내재모드함수가 명확한 물리적 의미를 가진다고 판단하였다. 예를 들어 이 연구에서 해석된 내재모드함수는 6개로 분류되었다. 첫 번째 내재모드함수의 중심주파수는 직류 성분(direct-current component)에 가까운 특성을 보였고, 두 번째 내재모드함수는 0.5 Hz ~ 3 Hz로 멀티콥터의 움직임에 의한 영향으로 판단되며, 세 번째에서 다섯 번째 내재모드함수는 멀티콥터에서 발생하는 간섭으로 해석되고, 마지막으로 여섯 번째 내재모드함수는 전력선 주파수인 50 Hz의 영향으로 판단된다고 해석하였다. 다만, 제안된 해석기법의 경우 하나의 이상체에 대한 해석은 가능하나 여러 개의 이상체가 존재할 때는 한계가 있음을 시사하고 있다.
모델 기반 기법(model-based method)
앞서 ‘자력계 위치 및 배열’에서 소개된 바와 같이 멀티콥터 바로 아래에 두 개의 자력계를 수직으로 고정한 시스템(Mu et al., 2020)이 고안된 바 있으며, 이 경우 멀티콥터에서 발생하는 간섭신호가 탐지 대상이 되는 자력 이상과 유사한 주파수 대역을 가져 단순한 필터링 기법으로는 간섭신호를 제거하기 어렵다고 판단하였다. 따라서, 멀티콥터로부터 발생하는 간섭신호를 효과적으로 제거하기 위하여 시스템의 수직 배열을 이용한 2채널 선형 시불변(linear time-invariant, LTI) 모델을 구성하였다(Fig. 6의 왼쪽). 여기서 은 우리가 찾고자 하는 이상체의 자력 이상을 의미하며 은 멀티콥터로부터 발생하는 간섭신호를 의미한다. 그리고 과 은 상부와 하부 자력계로부터 측정된 총 자기장을 의미한다. 상부 자력계의 경우, 멀티콥터로부터 거리가 가까우므로 더 큰 영향을 받는다는 원리를 이용하여 간섭신호에 k배를 곱하여 더해진 값으로 수식이 구성된다. 두 자력계 자료의 차와 각의 신호의 상관관계를 이용하여 k 값을 도출하게 되고 이상체의 신호와 간섭신호를 효과적으로 분리해낼 수 있음을 보였다(Fig. 6의 오른쪽).
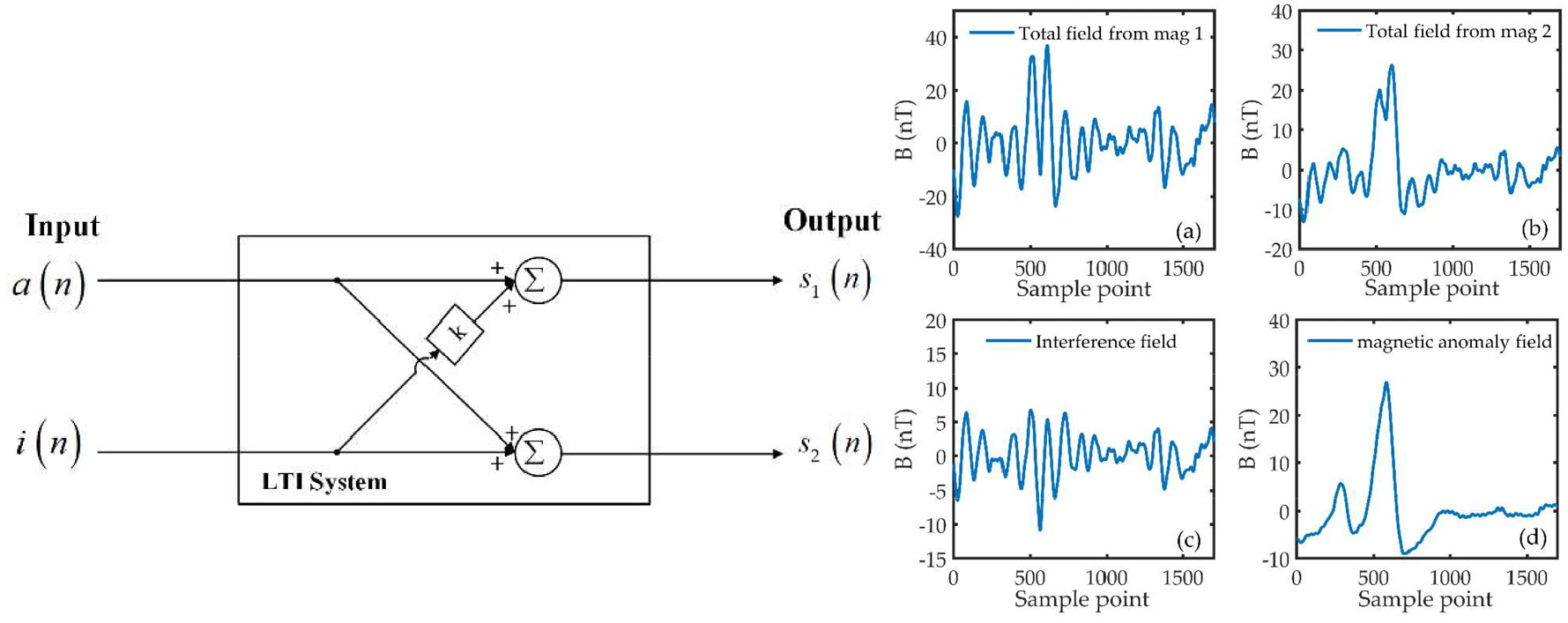
Fig. 6.
(Left) The signal model for the UAV-magnetometer system. (Right) Removal of the UAV interference field. (a) Outputs of magnetometer 1; (b) Outputs of magnetometer 2; (c) Separated UAV interference field; (d) Separated magnetic anomaly field (Mu et al., 2020).
또한, 잡음을 제거하기 위하여 주파수 영역 필터링 기법과 함께 noise model fitting이라는 방법이 제안되었다(Kolster et al., 2022). 이 연구에서 사용된 시스템은 세 개의 자력계를 사용하는 시스템으로 주파수 분석 결과, 50 Hz 영역에 전력선의 영향이 기록되고, 65.1 Hz 영역에 저장장치로부터 발생한 것으로 예상되는 잡음이 세 개의 자력계에서 동시에 나타난다고 분석하였다. 이러한 분석 결과를 바탕으로 차단 주파수가 40 Hz인 8차 저주파 Butterworth 필터를 이용하여 잡음을 제거하였다. 또한, 잡음이 신호와 겹쳐있는 상황에서 잡음제거를 위하여 noise model fitting 기법을 사용하였다. 이 방법은 Kass et al.(2020)에 제안된 모델 기반 기법에서 파생된 것으로, 역산을 통해 잡음 모델을 찾고 찾아진 모델을 바탕으로 잡음을 제거하는 방법이다. 이 방법은 필터링 기법과 비교하여 향상된 결과를 얻을 수 없었지만, 불규칙적으로 획득된 자료의 경우 유용하게 활용할 수 있을 것으로 분석하였다.
자료 해석
자력탐사 자료 해석의 핵심 요소는 모호성(ambiguity)을 줄여 여러 가능한 해 중에서 가장 타당한 결과를 도출하는 것이다. 이를 위해 자력탐사 자료 외에 사용할 수 있는 정보를 활용하는 것이 중요하다. 주어진 정보를 활용하는 방법에 따라 천부 이상체 해석 사례를 정리하면 다음과 같다.
1) 대상의 구조적 특징을 자력 이상도에서 확인하는 방법(Stoll, 2013; Nikulin et al., 2020; Schmidt et al., 2020; Yoo et al., 2020; Yoo et al., 2021; Zheng et al., 2021)
2) 대상을 단순한 발생원으로 근사하는 방법(Accomando et al., 2021; Kolster and Døssing, 2020; Kolster et al., 2022; Mu et al., 2020; Mu et al., 2021; Zheng et al., 2022)
3) 대상을 모사한 학습자료를 생성하여 기계학습을 적용하는 방법(Mukherjee et al., 2022)
대부분 사례의 탐사 대상이 얕은 심도의 인공 구조물이기 때문에, 자력 이상도에서 부존 여부를 확인하고 나아가 정확한 위치를 규명하려는 방법들이 적용되고 있다.
자력 이상도
자료처리를 통해 얻은 자력 이상은 그 자체로 해석을 위한 많은 정보를 포함하고 있는데, 천부 이상체를 파악하기 위해서는 지질구조에 의한 광역 이상을 제거한 자력 이상도를 활용해야 한다. 이때, 탐사 대상의 구조적 특징을 알면 자력 이상도에서 이상체를 더 명확히 파악할 수 있다.
무인멀티콥터 자력탐사의 초기 연구로서, 군사 시험장에서 탐사를 수행한 후 자력 이상도를 작성하여 불발 병기의 수평 위치를 확인한 사례가 있다(Stoll, 2013). 이는 대부분의 불발 병기가 수 미터 내외의 크기이므로 자력 이상도에서는 마치 임의 방향의 점 쌍극자(point dipole)처럼 나타나는 특징을 이용한 것으로 볼 수 있다. 불발 병기를 탐지하기 위한 또 다른 연구(Nikulin et al., 2020)에서도 자력 이상도를 통해 이상체의 위치를 추정하였고, 해당 위치에서 실제 불발 병기를 확인하였다. 불발 병기와 유사한 인공 구조물로써, 관로 탐지를 위한 탐사를 수행하여 이상체에 대한 자력 이상을 파악하기도 하였다(Zheng et al., 2021).
고고학적 조사를 위해 무인멀티콥터 자력탐사를 적용한 연구(Schmidt et al., 2020)에서는 지표 자력탐사와 얼마나 유사한 탐사 결과를 얻을 수 있는지 확인하였다. 다양한 고도에서 자료를 측정하여 자력 이상도를 작성하였고, 특히 두 개의 고도(0.5 m, 1.3 m)에서 얻은 자력 이상의 차이가 지표 탐사에서 얻은 자력 이상과 유사하다는 결론을 도출하였다. 또한, 매장터로 인한 점 모양의 이상체와 도로로 추정되는 선형 구조를 파악하여 고고학 조사에서의 무인멀티콥터 자력탐사의 효용성을 확인할 수 있었다.
국내에서는 무인멀티콥터 자력탐사를 이용하여 비무장지대에 매설된 대인 또는 대전차용 지뢰를 탐지하기 위한 연구가 수행된 바 있다(Yoo et al., 2021). 이 연구에서는 이동평균법을 적용하여 배경 매질이 아닌 지뢰에 의한 자력 이상만을 추출하고자 하였고, 이를 통해 지하에 매설되어 있던 다양한 물체들을 발견하였다. 또한, 해석적으로 신호를 계산함으로써(Nabighian, 1972; Roest et al., 1992) 이상체의 위치를 명확히 확인한 사례도 확인할 수 있다(Yoo et al., 2020).
단순 발생원으로 근사
천부 이상체의 수평적 위치뿐만 아니라 심도를 파악하는 방법으로 오일러 곱풀기(Euler deconvolution; Thompson, 1982)를 예로 들 수 있다. 이는 대량의 자력탐사 자료로부터 심도를 신속히 추정하기 위해 고안된 방법으로, 단순한 발생원(source)에 대한 구조 지표(structural index)를 가정하여 이상체의 위치 및 심도를 정량적으로 추정하는 방법이다. 특히, 인공 구조물(불발 병기, 지뢰 등)과 같이 몇몇 구조로 특정되는 천부 이상체의 경우, 이상체에 의한 자력 이상을 점 쌍극자, 선 쌍극자(line dipoles)와 같은 발생원으로부터의 자력 이상으로 근사하는 것이 합리적이므로(Butler et al., 2001), 오일러 곱풀기를 적용하는 것이 타당하다고 볼 수 있다.
오일러 곱풀기를 적용한 사례(Accomando et al., 2021)에서는 자료처리를 통해 자력 이상도를 작성한 후, 자력 이상의 분포양상이 수평적으로 선형인 것을 확인하여 이상체를 선 쌍극자로 가정하였다. 이후 오일러 곱풀기를 적용하여 이상체의 심도를 파악하였고, 지표 자력탐사의 결과와 비교하여 무인멀티콥터 자력탐사의 정확도를 검증하였다.
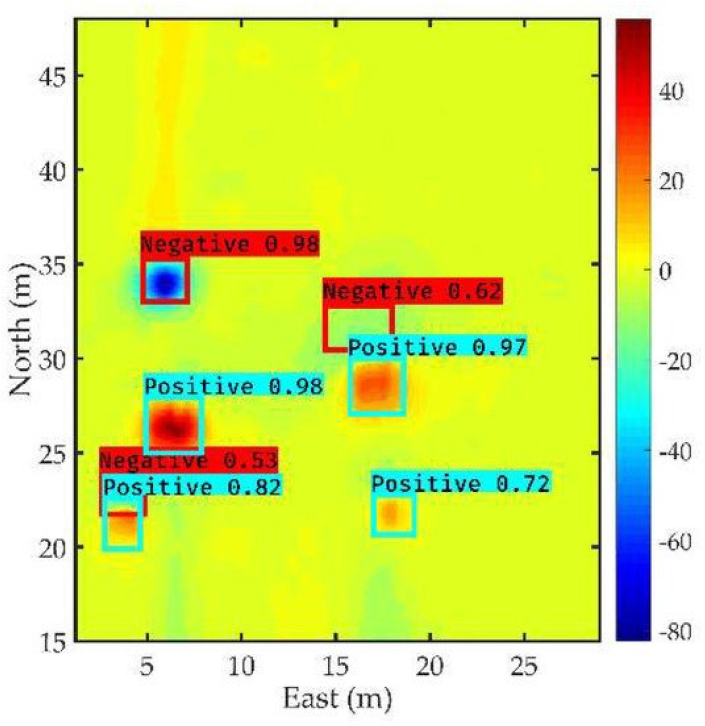
이론적으로 오일러 곱풀기는 고립된 하나의 발생원으로부터의 자력 이상을 가정한다. 만약 탐사 영역 안에 여러 개의 이상체가 존재한다면 각 이상체에 의한 자력 이상을 분리하는 과정이 선행되어야 한다. 이 선행 과정에 기계학습을 적용해 자동화한 연구도 수행되어(Mu et al., 2020), YOLOv3(You Only Look Once version 3; Redmon and Farhadi, 2018)로 이미지에서 특정 부분의 위치 및 크기를 매우 신속히 찾아주는 알고리즘이 개발되었다. YOLOv3 모델을 학습시키기 위해 이상체의 수, 위치, 심도, 복각, 편각 등을 다양하게 변화시키며 학습모델을 생성하였다. 이후 학습된 YOLOv3 모델이 고립된 하나의 발생원으로부터 자력 이상 영역을 예측하면(Fig. 7), 이 영역에 대해 오일러 곱풀기를 적용하여 이상체의 위치 및 심도를 추정한다. 결론적으로, 기계학습과 오일러 곱풀기를 결합함으로써 기존 방식에서는 많은 시간이 소요됐던 자력 이상 분리 과정을 획기적으로 줄임으로써 넓은 탐사 영역에 대한 효율적인 해석 방법을 제안하였다.
천부 이상체에 대한 3차원 위치를 규명한 예로, 불발 병기를 점 쌍극자로 근사하여 쌍극자 모멘트와 위치를 역산한 연구도 찾아볼 수 있다(Kolster and Døssing, 2020). 이 연구에서는 비선형 역산 중 하나의 방법인 레벤버그-마쿼트(Levenberg–Marquardt) 기법(Levenberg, 1944; Marquardt, 1963)을 적용하여 이상체의 쌍극자 모멘트와 위치를 규명하고자 했으며, 특히 앞서 ‘자력계 위치 및 배열’에서 설명한 배열 자료의 차이를 이용해 역산을 수행하였다. 그 결과, 자료의 차이를 역산 자료로 사용함으로써 초깃값에 민감한 비선형 역산의 단점을 완화할 수 있다는 것을 보였다. 비선형 역산의 초깃값 문제를 해결하기 위해 오일러 곱풀기를 적용한 사례도 있다(Zheng et al., 2022). 오일러 곱풀기를 통해 초깃값을 구하고, 이를 통해 이상체의 위치 및 쌍극자 모멘트를 더욱 정확히 결정하였다. 또한, 결정론적 역산 외에 확률론적 역산도 함께 적용하여 비교한 연구도 수행되었다(Kolster et al., 2022).
불발 병기의 탐지를 위해 무인멀티콥터 자력탐사뿐만 아니라 카트를 이용한 시간영역 전자탐사도 함께 적용한 연구에서는(Mu et al., 2021), 멀티콥터와 카트의 특성을 고려하여, 넓은 영역에 대한 자력탐사 후 이상체의 영역을 좁혀 전자탐사를 수행함으로써 더욱 효율적인 탐사가 가능함을 제시하였다. 특히, 자력 이상을 해석해 얻은 이상체의 위치를 전자탐사 역산의 초깃값으로 사용함으로써 지역 극소점(local minimum)에 빠질 수 있는 단점을 극복하고자 하였다. 추가로 자력 이상에서는 확인할 수 없는 전기전도성 이상체에 대해서도 탐지할 수 있음을 확인하였다.
오일러 곱풀기와 비선형 역산을 통해 천부 이상체의 위치 및 심도를 추정하기 위해서는 이상체를 단순 발생원으로 근사할 수 있느냐가 중요한 문제이며, 대부분의 연구에서는 이상체를 점 쌍극자 및 선 쌍극자로 가정하여 합리적인 결과를 도출하였다. 그러나, 이상체의 모양 및 방향, 배경 잡음의 영향에 따라 단순 발생원으로 근사 시 위치가 잘못 추정될 가능성이 있으므로 이에 대한 고려가 필요하다.
기계학습 적용
기존 자력탐사 자료 해석에 사용되는 자력 이상도, 오일러 곱풀기, 점 쌍극자 근사 역산 외에도 최근의 인공지능 기술 발전에 따라 기계학습을 적용한 사례를 확인할 수 있다. 천부 이상체 해석의 대표적인 예로, 관로와 같은 지하 기반 시설을 영상화한 연구를 들 수 있다(Mukherjee et al., 2022). 이 연구에서는 대상 이상체의 구조와 특징이 명확한 경우에 전통적인 역산과 비교하여 기계학습 기반 역산이 고해상도 영상화에 유리하다고 판단하였고, 이를 위해 지도학습을 적용하였다. 학습을 위해 183,070개의 3차원 모델을 생성하였고, 예측 시의 일반화 성능을 향상하고자 가우시안 잡음을 무작위로 자력탐사 자료에 추가하여 학습에 사용하였다. 학습된 모델을 실제 현장에서 얻은 자료에 적용하여 관로 모양의 이상체를 높은 해상도로 영상화하였다(Fig. 8). 기계학습 기반 영상화는 무인멀티콥터 자력탐사 대상 중 하나인 얕은 심도의 인공 구조물 영상화에 장점이 있으므로, 앞으로 많은 적용이 시도될 것으로 예측된다.
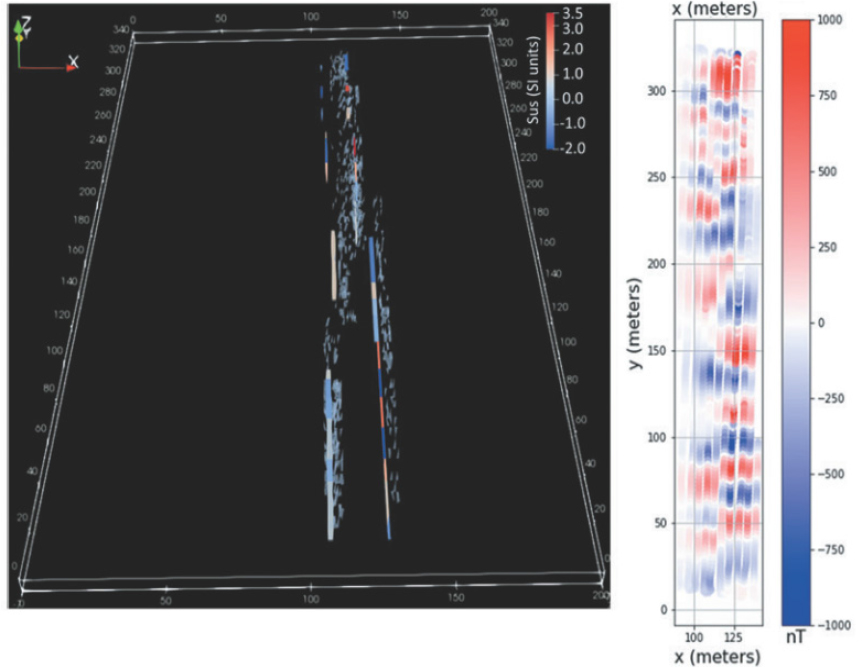
Fig. 8.
(Left) Upscaled blocky representation of the anomalous pipe-like targets used for computing the magnetic field response. (Right) Predicted magnetic field from the model (Modified from Mukherjee et al., 2022).
결 론
천부를 대상으로 한 무인멀티콥터 자력탐사는 지표에 근접한 비행을 통해 작은 규모의 이상체에 대한 신호의 강도를 세게 하고, 탐사 영역을 정밀하게 비행하여 자료의 해상도를 높인 탐사 방법이다. 불발 병기나 지뢰와 같이 지표 자력탐사가 수행될 수 없는 대상에 대한 탐사가 가능하며, 그 위치 및 심도를 정량적으로 추정할 수 있다는 장점이 있다. 또한 관로와 같은 기반 시설을 효율적으로 탐사할 수 있으며, 고고학적 조사를 위해 적용될 수 있다.
자력계는 목적에 따라 다양한 위치와 배열로 설치되어 개발되고 있다. 특히, 안정적인 비행을 위해 멀티콥터 근처에 고정형으로 자력계를 설치하면서 여러 개의 자력계 조합을 이용하여 멀티콥터에 의해 발생하는 잡음이나 비행에 의한 잡음을 효과적으로 제거할 수 있다. 자료처리 시, 자력계의 위치 및 배열과 연관되어 신호 대 잡음비를 높이기 위한 기법들이 연구되고 있다. 시간 변화에 따라 불규칙적으로 기록된 신호와 잡음의 특성을 정확하게 파악하고, 이를 효과적으로 분리하기 위해 주파수 영역뿐만 아니라 파형 변환 등을 활용한 주파수-시간 분석을 수행하고 있다. 또한, 주파수 영역 필터를 이용한 잡음제거뿐만 아니라 경험적 모드 분해 및 최적의 잡음 모델을 구성하여 이상체에 의한 자력 이상을 분리하기 위한 기법들도 있다.
천부 이상체를 규명하기 위해서는 크게 자력 이상도, 단순 발생원으로의 근사, 기계학습 기반 역산에 기초하여 해석할 수 있으며, 이러한 해석에 기초하여 이상체의 수평적 위치뿐만 아니라 심도를 추정할 수 있다. 특히, 점 쌍극자를 가정한 오일러 곱풀기 또는 비선형 역산이 주를 이루고 있으며, 인공지능 기술의 발전과 함께 기계학습 기반 역산이 중요해지고 있다.
다양한 연구사례에서 확인할 수 있듯이 무인멀티콥터 자력탐사는 현재 발전 중인 기술로, 여러 종류의 잡음이나 적은 유효 탑재량 등의 문제는 여전히 개선이 필요하며 정밀한 탐사를 위한 비행 위치의 정확도 확보도 중요하다. 앞으로 이런 요소들에 관한 연구가 필요하며, 지속적인 연구가 수행된다면 항공 및 지표 자력탐사의 장점을 융합한 탐사 방법으로 자리매김할 것으로 기대된다.
